
Fターム[5H303KK02]の内容
位置、方向の制御 (6,897) | 制御部、演算部の機能 (1,155) | 位置、速度偏差信号等に対する演算要素 (490) | 比例演算要素 (162)
Fターム[5H303KK02]に分類される特許
1 - 20 / 162
モータ制御装置
位置制御装置
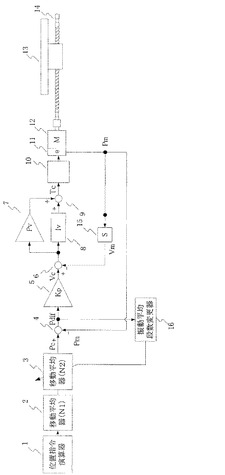
【課題】送り軸駆動系の剛性が低下した場合に、低周波の振動が発生せず、安定に動作させる位置制御装置を提供する。
【解決手段】移動平均段数変更器16は、位置偏差Pdifの変動に基づき、移動平均器3の移動平均段数N2を変更する。移動平均段数変更器は、位置偏差をFFT演算器にて周波数解析し、スペクトラム最大値を算出する。算出されたスペクトラム最大値が予め設定した比較値を超えた場合に、移動平均段数変更器は、移動平均段数を増加させる指令を移動平均器3へ出力する。移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
(もっと読む)
不感帯処理部を備えた電動機の制御装置

【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
サーボドライブシステム
【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
制御装置及び方法
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
トリガ発生装置
【課題】 サーボモータに同期して稼動する外部装置に対して作動を指示するトリガ信号を高精度に出力することが可能なトリガ発生装置を提供する。
【解決手段】 位置検出器のサンプリング開始からトリガ信号を発生させるタイマ設定時間を算出するまでに要する時間をサーボ側遅延時間とし、トリガ発生装置がトリガ信号を出力してから外部装置が作動を開始するまでに要する時間を外部装置側遅延時間とするとき、本発明のトリガ発生装置は、サーボモータの位置情報から算出された外部装置が作動開始位置に到達するまでの到達所要時間からサーボ側遅延時間及び外部装置側遅延時間を減算してタイマ設定時間を算出するタイマ設定時間算出部と、タイマ設定時間に基づきトリガ信号を出力するトリガ信号出力部と、を有する。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
位置決め装置、露光装置およびデバイス製造方法
【課題】位置決め精度の向上に有利な技術を提供する。
【解決手段】位置決め装置は、ステージと、ベースと、前記ステージと前記ベースとの間に配置されていて、ばね性を有する支持部で前記ステージを支持する支持機構と、前記ステージを駆動するように前記ステージと前記ベースとの間に配置されたアクチュエータと、前記アクチュエータを制御する制御部とを備える。前記制御部は、目標位置に対する前記ステージの位置偏差と、前記ステージと前記ベースとの相対位置の変動量とに基づいて、前記位置偏差が低減され、かつ、前記支持部の前記ばね性によって前記ステージに作用する力の少なくとも一部が打ち消されるように前記アクチュエータを制御する。
(もっと読む)
線形運動デバイスの制御装置
【課題】検出磁場と線形運動デバイスの位置とにずれがある場合でも、線形運動デバイスを正確に位置決めすることができる線形運動デバイスの制御装置を提供する。
【解決手段】デバイス11の磁石19が発生する磁場を検出し、検出された磁場の値に応答する出力信号VMOを出力する磁場センサ113、制御信号VCM[2:0]と出力信号VMOの振幅とを関連付けた電圧指令信号VCOを生成する電圧信号生成回路114、出力信号VMOと電圧指令信号VCOとの偏差を増幅して出力信号VEOを生成する差動増幅器115、出力信号VEOの値に応じて線形運動デバイス11を駆動する出力ドライバ112と、出力信号VEOを、磁場センサ113から出力される出力信号VMOの振幅に応じて補正し、出力ドライバ112への入力信号を生成するゲイン補正回路116によって制御装置を構成する。
(もっと読む)
制御装置および制御方法、並びにプログラム
【課題】新たなハードウェアを必要とせず、タクトタイムを変化させることなく、振動を抑制する。
【解決手段】パラメータ生成部102は、基準距離について、予め定めた移動時間毎に、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを生成する。データベース103は、パラメータ生成部102から供給されたパラメータを記憶する。パラメータ決定部104は、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを決定する。軌道計算部105は、決定されたパラメータから軌道を計算する。本発明は、ロボットを制御する制御装置に適用できる。
(もっと読む)
波動歯車装置を備えたアクチュエータの位置決め装置
【課題】スライディングモード制御により波動歯車装置の非線形特性を補償するアクチュエータの位置決め装置を提案すること。
【解決手段】位置決め装置のスライディングモード制御器は、位置指令θl*、制御対象を表す状態変数xを入力として制御対象への制御入力uを生成する。制御対象は次式で規定する。
スライディングモード制御系の切換面は設計変数Sで規定する。
制御入力uは、σを切換関数、kを切換ゲイン、として、線形状態フィードバック制御項ulと非線形制御入力項unlの和である。 (もっと読む)
(もっと読む)
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置
【課題】少ない演算量で機械の振動を抑制することが可能な指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置を提供する。
【解決手段】指令発生装置20の設計方法は、関数a(t)を設定するステップと、関数a(t)をラプラス変換して関数A(s)を求めるステップと、極を定める減衰係数がそれぞれ0、かつ極を定める固有角周波数が、それぞれ関数a(t)に含まれるパワーが0の異なる周波数ωsであり、零点が、それぞれ複数の振動成分をもつシステムの各振動極であり、定常ゲインがそれぞれ1となる複数の2次の伝達関数G1(s)〜Gn(s)(nは自然数)を設定するステップと、関数A(s)と伝達関数G1(s)〜Gn(s)とを乗じて関数Fb(s)を求めるステップと、関数Fb(s)を逆ラプラス変換して関数fb(t)を求めるステップとを含む。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
4軸アライメントステージ
【課題】 4つの各駆動ユニット同士の機械的な姿勢の干渉による過剰な出力を防止する。
【解決手段】 ベース1と上部プレート2との間における上部プレート2の一方の対角位置と対応する2個所に、XYθガイド4とX軸方向のボールねじ直動機構6からなるX軸方向駆動ユニット3xを介装し、上部プレート2の他方の対角位置と対応する2個所に、XYθガイド4とY軸方向のボールねじ直動機構6からなるY軸方向駆動ユニット3yを介装する。リニアスケール13の検出値に基づくフィードバック制御を行うX軸方向駆動ユニット3xに比して、Y軸方向駆動ユニット3yは、ボールねじ直動機構6のサーボモータ12に設けたモータエンコーダ16による検出値に基づくフィードバック制御を行うことでサーボ剛性が小さくなるようにして、姿勢干渉による推力上昇分をY軸方向駆動ユニット3yで機械的に吸収させる。
(もっと読む)
軸トルク制御装置
【課題】負荷側モータ(エンジン)の回転数制御と駆動モータ(動力計)の軸トルク制御の干渉を抑制した軸トルク制御ができる。
【解決手段】軸トルク制御器は、エンジンが速度制御されている場合に動力計に対するトルク外乱を外乱オブザーバ21により推定して動力計のトルク指令値にフィードバックすることにより動力計の加速度制御系を構成する。さらに、軸トルク検出値または軸トルク推定値を共振比制御理論に基づいて決定されるゲインKr(28)で動力計の加速度指令値にフィードバックし、さらにまた、動力計の速度検出値ω2を所定の共振抑制効果が得られるように決定したゲインKvで動力計の加速度指令値にフィ−ドバックし、及び、軸トルク指令値に軸トルク検出値が追従するように比例積分制御系23を構成する。
(もっと読む)
加工を高精度化するサーボ制御システム
【課題】角度同期方式の長所を生かしつつ、基準角度が与えられない場合でも角度同期方式の学習制御の適用を可能にするサーボ制御システムの提供。
【解決手段】サーボ制御システム10は、各軸を駆動するX軸サーボモータ12、Y軸サーボモータ14及びZ軸サーボモータ16をそれぞれ制御するX軸サーボ制御装置18、Y軸サーボ制御装置20及びZ軸サーボ制御装置22を有する。またX軸サーボ制御装置18及びY軸サーボ制御装置20は、上位制御装置24から送られる各軸指令に基づいて、単調増加又は一方向に変化する基準信号θを作成する基準信号生成部28及び32をそれぞれ有し、学習制御器26及び30は該基準信号に基づいて学習制御を行う。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
1 - 20 / 162
[ Back to top ]