
Fターム[5H501CC04]の内容
電動機の制御一般 (20,975) | 電源 (822) | 直流電源を用いるもの (598) | 電池を用いるもの (415) | 2次電池を用いるもの (270)
Fターム[5H501CC04]に分類される特許
1 - 20 / 270
回転機の制御装置
モータ制御装置
回転力発生装置
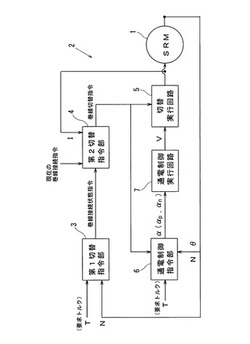
【課題】相巻線における巻線の接続状態を切り替えても、トルク波形の変動が生じない回転力発生装置を提供する。
【解決手段】トルクTと回転数Nを用いて相巻線の「直列接続→並列接続」または「並列接続→直列接続」の切替えを実施する際に、相巻線の通電状態が非通電のタイミングで切替えを実施するとともに、相巻線の電流波形を制御して切替え直前と直後のトルク波形を略同一波形に揃える。これにより、SRモータ1は、広い運転領域において高出力を得ることができるとともに、相巻線の通電中に巻線組の切替えが実施されることで生じるトルク変動を回避でき、さらに、巻線組の切替えが行われて巻線組のインダクタンスが変化することによるトルク波形の変動も回避することができる。
(もっと読む)
モータ制御装置

【課題】モータ制御用のプログラムがオンボード形式で適切に書き込まれた記憶素子を実装したモータ制御装置を提供する。
【解決手段】本発明のモータ制御装置1によれば、モータ2を駆動するための制御用プログラム15が書き込まれるメモリ13が配置された回路基板10と、回路基板10に形成され、メモリ13に制御用プログラム15を書き込むために電気信号を出力するコンタクトプローブ34が接触するランド18と、コンタクトプローブ34から出力された電気信号をランド18からメモリ13に伝送する導通パターン19とを備え、ランド18は、スルーホール18aを有し、スルーホール18aにコンタクトプローブ34を嵌合させることによってコンタクトプローブ34と接触する。
(もっと読む)
モータ制御装置、歩行補助装置及びモータ制御方法
【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
電気モータ制御装置
【課題】固定容量型のポンプを使用しつつ、レバーの操作量に応じた速度でアクチュエータを駆動する。
【解決手段】電気モータの回転速度を制御する電気モータ制御装置であって、ポンプの吐出圧が最高負荷圧よりも所定の設定圧だけ高くなるように、最高負荷圧に基づいて電気モータの暫定目標回転速度を算出し(S74)、ポンプの吐出圧に基づいて、電気モータの出力トルクがその吐出圧のときに出力可能な最大トルクとなる電気モータの回転速度を上限回転速度として算出し(S75)、暫定目標回転速度と上限回転速度とのうち、低いほうを電気モータの目標回転速度として算出し(S76)、電気モータの回転速度が目標回転速度となるように、電気モータの回転速度を制御する(S77)ことを特徴とする。
(もっと読む)
制振制御装置
【課題】フィルタへの余剰トルク成分の蓄積を抑制する制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、車両の車両情報を入力として、車両へのトルク入力と前記モータの回転速度の理想伝達特性のモデルGm(s)と、車両へのトルク入力とモータの回転速度の実伝達特性のモデルGp(s)とを用いたモデルGm(s)/Gp(s)を含むフィルタにより第1トルク目標値を算出する第1トルク目標値算出手段と、モータの回転速度を検出するモータ回転速度検出手段と、モデルGp(s)を含むフィルタを用いて、トルク指令値及び回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を算出する第2トルク目標値算出手段と、第1トルク目標値と前記第2トルク目標値とを加算してトルク指令値を算出する加算手段と、トルク指令値に基づいて、モータを制御するモータ制御手段とを備える。
(もっと読む)
駆動装置
【課題】モータの制御性を高くすることや車両の挙動をより適正なものとする。
【解決手段】カットオフ周波数Fc以上の周波数成分を減衰させるローパスフィルタ処理を電流センサにより検出されたバッテリの充放電電流Ibに施して得られるフィルタ後電流FIbをモータの制御に用いるものにおいて、モータの回転数Nmが昇圧コンバータを含む回路の共振回転数領域(下限回転数N1〜上限回転数N2の領域)外のときには(S110)、所定周波数Fc1をカットオフ周波数Fcに設定する(S120)。一方、モータの回転数Nmが共振回転数領域内のときには(S110)、所定周波数Fc1より小さな所定周波数Fc2または所定周波数Fc3をカットオフ周波数Fcに設定する(S130〜S150)。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
電子制御装置
【課題】駆動対象に対する外力の加わり方が異なる場合でも、噛み合わせクラッチの接続を確実に解除する。
【解決手段】電子制御装置100は、バックドアを開閉動作させるために、モータ駆動部6で電動モータ12を回転させ、電動モータ12の駆動力をバックドアに断続して伝達するために、クラッチ駆動部4で噛み合わせクラッチを接続または接続解除させ、電流検出部2で電動モータ12に流れる電流を検出する。モータ駆動部6で電動モータ12を停止させた後、電流検出部2で検出された、電動モータ12に流れた停止直前の電流値がしきい値以上である場合に、モータ駆動部6で電動モータ12を停止前の回転方向と逆方向に所定時間だけ回転させ、停止直前の電流値がしきい値未満である場合に、モータ駆動部6により電動モータ12を停止前の回転方向に所定時間だけ回転させ、かつ、クラッチ駆動部4で噛み合わせクラッチを接続解除させる。
(もっと読む)
モータ制御装置およびトルク値取得方法
【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
電動過給機の異常検出装置と検出方法
【課題】電動機の経時劣化を迅速かつより正確に検出する電動過給機の異常検出装置と異常検出方法を提供することを目的とする。
【解決手段】電動機によりコンプレッサを駆動して内燃機関の過給を行う電動過給機の異常検出装置であって、直流電源から前記電動機に供給される電力または電流に対して、電動機の定格回転速度を定める電動機定格回転速度導出手段(61,62)と、前記定格回転速度と実回転速度との差分が閾値以上の場合に異常検出信号を発生する異常有無判定手段(63)と、を備える。
(もっと読む)
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
電動機の制御装置、制御システム及び制御方法
【課題】電動機のトルクを、安定して高い精度で制御できる、電動機の制御装置、制御システム及び制御方法を提供する。
【解決手段】永久磁石同期電動機の回転軸に、半導体歪みセンサの出力を無線送信する無線送信装置を取り付ける一方、電動機本体に無線送信装置からの送信を受信する無線受信装置を設ける。電動機を駆動制御する制御装置は、無線送受信装置を介して歪みセンサの出力を入力し、電動機のトルクを検出し、トルク検出値とトルク指令値との偏差に基づき、電動機のPWM制御信号を演算して出力する。これにより、電動機における電流とトルクとの相関が、永久磁石の温度変化や劣化によって変動しても、電動機のトルクを高精度に制御できる。
(もっと読む)
油圧制御装置及びそれを備えた四輪駆動車両の駆動力配分装置
【課題】電動モータの故障を高い精度で検知できると共に、電動モータの正常状態を故障と誤検知する確率を低く抑えることができるようにする。
【解決手段】モータ(電動モータ)(37)により駆動されるオイルポンプ(35)から供給される油圧によって前後トルク配分用クラッチ(10)の作動制御を行う四輪駆動車両用の油圧制御装置(60)において、モータ(37)の故障判定を行うモータ故障判定手段(50)は、モータ(37)の故障検知開始時点(t2)からモータ(37)の駆動電流値(I)を積算したモータ駆動電流積算値(Is)の算出を行うと共に、モータ故障判定用の閾値(Ith)を所定の割合で増加させる。そして、モータ駆動電流積算値(Is)が闇値(Ith)以下となった場合、故障確定タイマ(Tm2)のカウント完了を待ってモータ(37)の故障確定判定を行う。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
モータ制御装置
【課題】モータに駆動電流を供給するリレー接点の溶着等による不具合を回避するモータ制御装置を提供する。
【解決手段】比較演算回路33,34により、モータ15に駆動開始、駆動停止の指示を与える外部スイッチ3のON/OFF状態に基づく所定の論理レベルの信号と、モータ15の端子電圧に対応する論理レベルとを比較し、双方の論理レベルが一致すれば、リレー13,14の接点13b,14bに溶着等の異常は発生していないと判定する。一方、双方の論理レベルが一致しない場合には、リレー13,14の接点13b,14bに溶着等の異常が発生し、異常な動作状態にあると判定する。そして、半導体スイッチ39をOFFにして、リレー13,14とバッテリ1との電気的な接続を遮断し、モータ15への給電を停止する。
(もっと読む)
1 - 20 / 270
[ Back to top ]