
Fターム[5H505EE55]の内容
交流電動機の制御一般 (51,584) | 電動機の制御方法 (6,264) | 速度に応じた制御をするもの (268)
Fターム[5H505EE55]に分類される特許
21 - 40 / 268
電力変換装置の制御装置
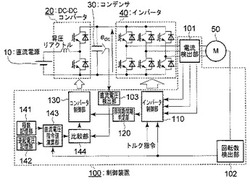
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
車両走行制御システム

【課題】車両走行制御システムにおいて、昇圧切替線と降圧切替線の間に動作点がある場合に、適切に降圧して損失を低減することである。
【解決手段】車両走行制御システム10は、回転電機14、蓄電装置20、電圧変換器24、インバータ回路28等と、制御装置30を含む。制御装置30は、回転電機14の動作点を取得する動作点取得部40と、取得した動作点が、昇圧状態に適した領域にあるか、降圧状態に適した領域にあるかを区別する動作点領域判定部42と、動作点が昇圧切替線側から降圧切替線に近づいて予め定めた降圧機会増加線の領域にあるかどうかを判断する降圧機会増加領域判定部44と、降圧機会増加領域にあるときに、車両走行状態を変更することで電圧変換器24の動作点を移動させて降圧状態に変更する降圧状態変更部46を含む。
(もっと読む)
モータ制御装置及びモータ駆動システム
【課題】少なくとも1つの制御モードがフィードフォワード制御とフィードバック制御とを併せ持っている場合でも、制御切替時におけるトルク変動を抑制することを目的とする。
【解決手段】フィードフォワード制御を行う非干渉制御部25を備える第1制御部11と、非干渉制御部25による調整量を用いる第2制御部12とを切り替えて採用する場合において、第2制御部12が採用されている場合に、第2制御部12によって設定された第2電圧指令値と非干渉制御部25による調整量とを用いて第1制御部11のPI制御器が備える積分器の初期値を設定する第1プリセット部20と、第1制御部11が採用されている場合に、第1制御部11によって設定された第1電圧指令値と非干渉制御部25による調整量とを用いて第2制御部12のPI制御器が備える積分器の初期値を設定する第2プリセット部30とを備えるモータ制御装置を提供する。
(もっと読む)
車両走行制御システム
【課題】車両走行制御システムにおいて、昇圧切替線と降圧切替線の間に動作点がある場合に、適切に降圧して損失を低減することである。
【解決手段】車両走行制御システム10は、回転電機14、蓄電装置20、電圧変換器24、インバータ回路28等と、制御装置30を含む。制御装置30は、回転電機14の動作点を取得する動作点取得部40と、取得した動作点が、昇圧状態に適した領域にあるか、降圧状態に適した領域にあるかを区別する動作点領域判定部42と、回転電機14の動作点がほとんど移動せずに滞留している場合にその滞留時間が予め定めた滞留閾値時間以上であるかどうかを判断する滞留時間判定部44と、滞留時間が滞留閾値時間以上のときは、降圧状態に変更する降圧状態変更部46を含む。
(もっと読む)
インバータの制御装置
【課題】 可変速度範囲が広く、かつ、低損失のモータ駆動システムを実現する。
【解決手段】 インバータの制御装置100は、非同期PWMモードと、同期PWMモードとを有するゲート信号生成部101と、非同期/同期切替部102とを有する。非同期/同期切替部102は、ゲート信号生成部101が同期PWMモードでインバータ10に与えるゲート信号を生成しているとき、インバータ10からモータ20に供給される電流のうちd軸電流が正になったか否かを判定し、判定結果が肯定的である場合にゲート信号生成部のゲート信号の生成モードを非同期PWMモードに切り替える。
(もっと読む)
織機における運転制御装置及び運転制御方法
【課題】起動時の筬打ち不足を解消し、かつ織機の目標回転速度の下限を下げる。
【解決手段】デルタ用電磁接触器25及びスター用電磁接触器26は、織機制御コンピュータCoのON−OFF制御を受ける。織機駆動モータMは、インバータ28を介して商用電源27に電気的に接続されている。インバータ28は、織機制御コンピュータCoの指令制御を受け、織機制御コンピュータCoは、インバータ28の出力電圧や出力周波数を指令制御する。織機制御コンピュータCoは、起動時にインバータ28とデルタ結線回路とを用いて織機駆動モータMを起動する起動運転制御機能と、定常運転時にインバータ28とスター結線回路とを用いて織機駆動モータMを駆動する定常運転制御機能とを有する。
(もっと読む)
モータ駆動回路、および、モータ駆動システム
【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】高トルク領域における制御応答性を適切に高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、フィードバック制御に加えてフィードフォワード制御を実行する。フィードフォワード制御に用いられるフィードフォワードゲインは、交流電動機M1の状態に応じて可変に設定される。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
横磁束機械
【課題】本発明の目的は、単純で経済的なコア構造をもつ横磁束機械装置(TFMA)を提供することである。本発明の他の対象は、インホイールモータやエンジンのクランクシャフトに結合された発電電動機やリニアモーター・ドライブのクランクシャフトの上でリニアコンプレッサのようない可変速用途において、優れたトルク特性をもつTFMAに提供することである。
【解決手段】このTFMAは、積層鉄板をもつコアを採用する。コアは、3D磁束通路を作るために、左斜め部及び右斜め部を有する。斜め部をもつ積層鉄コアを用いる複数の3D構造が、開示される。斜め部を使用することにより、コアはムカデのように見えます。CTFMと呼ばれるムカデのようなTFMは、複数のタイプをもつ。このCTFMのために、複数のモータ構造及び複数の駆動装置も開示される。
(もっと読む)
誘導電動機の制御装置及び誘導電動機の制御方法
【課題】誘導電動機の制御において、装置の耐久性を損なうことなく、通常よりも高いトルクでの制御を行うこと。
【解決手段】誘導電動機の制御装置であって、誘導電動機の動作条件に応じて必要とされるトルクの値を時系列に求め、誘導電動機の回転速度に応じたトルクが予め定められたトルク制御パターンと比較して必要とされるトルクが満たされているか否か確認し、BASE速度以下の速度領域において必要とされるトルクが満たされていない場合、定トルク制御における励磁電流の最大値が高くなるようにトルク制御パターンを変更し、BASE速度以上の速度領域において必要とされるトルクが満たされていない場合、BASE速度を通常よりも高くするように変更するトルク特性設定装置21と、変更されたトルク制御パターンに応じて磁界制御パターンを変更する磁束指令変更装置140とを含むことを特徴とする。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
車両
【課題】コンバータおよびインバータを含むモータ駆動回路を備えた車両において、駆動回路の共振に起因する直流電源の過熱を適切に抑制する。
【解決手段】コンバータおよびインバータを含むモータ駆動回路を制御する制御装置は、コンバータの上アームオン制御中(非昇圧中)である場合(S10にてYES)で、かつモータ回転速度Nが共振回転速度領域に含まれる場合(S11にてYES)、車載の電流センサによる電流Ibの計測値の2乗値を予めオフラインで検出した電流Ibの真値の2乗値に換算し(S12)、電流Ibの真値の2乗値が許容値以上である場合(S13にてYES)、矩形制御の実行を禁止する(S14)。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
車両
【課題】コンバータおよびインバータを含むモータ駆動回路を備えた車両において、駆動回路の共振に起因する直流電源の過熱を適切に抑制する。
【解決手段】コンバータおよびインバータを含むモータ駆動回路を制御する制御装置は、コンバータの上アームオン制御中(非昇圧中)である場合(S10にてYES)で、かつモータ回転速度Nが共振回転速度領域に含まれる場合(S11にてYES)で、かつ電流Ibの2乗値が許容値以上である場合(S12にてYES)、インバータの矩形制御の実行を禁止する(S13)。一方、上アームオン制御中でない場合(S10にてNO)、モータ回転速度Nが共振回転速度領域に含まれない場合(S11にてNO)、電流Ibの2乗値が許容値未満である場合(S12にてNO)の少なくともいずれかの場合、制御装置は、矩形制御の実行を許容する(S14)。
(もっと読む)
回転機の制御装置
【課題】直流交流変換回路のスイッチング素子をオン・オフ操作することで回転機を流れる電流、トルク、および磁束の少なくとも1つを有した制御量を制御する新たな回転機の制御装置を提供する。
【解決手段】予測部33によって予測された予測電流ide,iqeのベクトルと、指令電流のベクトルidr,iqrとの差の内積値にオフセット値Δを加算したものである評価関数Jを最小とする操作状態(電圧ベクトル)が、インバータIVの操作状態として決定される。矩形波制御時においては、トルクフィードバック制御によって定まる位相に応じた操作状態以外の評価関数Jにおけるオフセット値Δを増大させる。
(もっと読む)
交流電動機の巻線切換装置およびインバータ装置
【課題】加減速中などの条件下でも巻線切換時のショックがなく、簡単な構成で実現できる3相交流電動機の巻線切換装置およびインバータ装置を提供する。
【解決手段】相毎に複数の巻線を備えた交流電動機と、複数の巻線を切換える巻線切換手段と、交流電動機を駆動するインバータ装置とを備え、インバータ装置は、巻線切換指令信号を出力する巻線切換指令信号発生器と、複数内蔵した交流電動機の電動機定数を、巻線切換指令信号の出力に応じて切換える定数切換器と、交流電動機に流れる電動機電流の検出値を、電動機定数の変化に応じて補正する電流検出値補正演算器と、を備える。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
回転機の制御装置
【課題】半波整流を行なう際に中性点の電位を操作したのでは、各相の巻線が有効利用されているとはいい難いこと。
【解決手段】スイッチング素子Sup、Svp,Swnがオンとなる場合、スイッチング素子Snnがオン且つスイッチング素子Snpがオフとされる。ここで、スイッチング素子Snp,Snnの操作がなされないなら、スイッチング素子Sup、Svp,Swnがオンとなることで、固定子巻線の接続点の電位(中性点電位)は、「VDC/2」よりも高くなる。これに対し、スイッチング素子Snnをオンとすると、中性点電位は、「0」となる。このため、スイッチング素子Sup,Svpに流れる電流が増大し、ひいてはモータジェネレータ10に流れる電流が増大することで、スイッチング素子Snnによって中性点電位を操作しない場合と比較して、モータジェネレータのトルクが大きくなる。
(もっと読む)
21 - 40 / 268
[ Back to top ]