
Fターム[5H505GG04]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | 電流フィードバックするもの (1,845)
Fターム[5H505GG04]に分類される特許
121 - 140 / 1,845
同期電動機の駆動装置
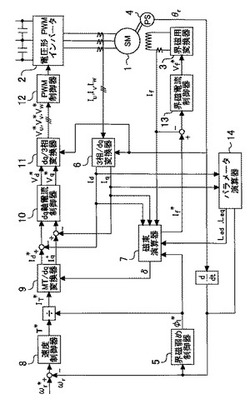
【課題】同期電動機の力率及びトルクを簡便な方法で高精度に制御することができる同期電動機の駆動装置を提供する。
【解決手段】同期電動機の実速度と速度基準との偏差に基づいて、同期電動機のトルク基準を算出する速度制御手段と、同期電動機の電機子に流れる電流、同期電動機の界磁に流れる電流、電機子の反作用インダクタンスの算出値に基づいて、同期電動機の内部相差角を算出する磁束演算手段と、トルク基準と内部相差角とに基づいて、同期電動機の力率が1となるように、電機子の電流基準を算出する電流基準演算手段と、電機子に流れる電流と電機子の電流基準との偏差がなくなるように、同期電動機に流れる電流を制御する電流制御手段と、磁束演算手段が内部相差角を算出する際に利用する電機子の反作用インダクタンスの算出値を同期電動機の負荷状態に応じて変化させるパラメータ演算手段と、を備えた。
(もっと読む)
回転機の制御装置

【課題】変調率が過度に大きくなる場合、制御量とその指令値との差を入力とする積分要素の出力値を参照するモデル予測制御によって、かえって制御性の低下を招くこと。
【解決手段】インバータの次回の操作状態を表現する電圧ベクトルV(n+1)は、ステップS20において、評価関数Jを最小とする電圧ベクトルに決定する。ここで、偏差edq(n+2)は、次回の操作状態として仮設定されたものによる予測電流ide(n+2),iqe(n+2)と指令電流idr,iqrとの差である。また、仮積分値Intは、前回までに採用された電圧ベクトルによって生じる偏差を入力とする積分要素の出力値(積分値In)に偏差edq(n+2)にゲインKiを乗算した値を加えたものである。ステップS28において変調率Mが閾値Mth以上であると判断される場合、積分値Inの更新を禁止する。
(もっと読む)
回転電機制御装置
【課題】インバータを備えた回転電機駆動装置と直流電源部との接続が遮断された場合に、回転電機からインバータを介して回生される回生電力を迅速に低減させる。
【解決手段】回転電機の回転に同期して回転する2軸の直交ベクトル空間において、各軸に沿った界磁電流と駆動電流との合成ベクトルである電機子電流を制御してインバータを制御するインバータ制御部を備える。インバータ制御部は、直流電源部とインバータとの接続が遮断状態であると判定した場合には、回転電機の回生トルクがゼロとなるようにインバータを制御するゼロトルク制御を実行すると共に、遮断状態でのゼロトルク制御の実行に際して、回転電機の回生トルクをゼロに低下させていく際のトルク変化率ΔTの制限値を、直流電源部とインバータとの接続が維持されている状態でのトルク変化率ΔTの制限値LT1よりも大きい値に設定する。
(もっと読む)
電動機の可動子の温度を検出する温度検出装置
【課題】電動機の可動子を過熱保護するために電動機の可動子の温度を検出することができる温度検出装置を提供する。
【解決手段】永久磁石同期電動機5の可動子52の温度を検出する温度検出装置10は、永久磁石同期電動機5の固定子53に設けられた巻線55u,55v,55wのU相交流電流値Iu、V相交流電流値Iv及びW相交流電流値Iwを検出する電流検出部11と、U相交流電流値Iu、V相交流電流値Iv及びW相交流電流値Iwを用いて可動子52の鉄損pを推定する鉄損推定部12と、鉄損pを用いて可動子52の温度を推定する可動子温度推定部13と、を有する。
(もっと読む)
電力変換装置
【課題】交流電動機の過励磁を正確に検出し、過励磁が検出されたとき過励磁を抑えるように交流電動機を制御する電力変換装置を提供する。
【解決手段】直流電力を所望の交流電力に変換する電力変換部と、前記電力変換部から交流電動機に出力される電流を検出する電流検出部と、前記電流検出部で検出された電流情報を励磁電流、トルク電流および一次電流に変換する電流変換部と、前記電流変換部で変換された励磁電流とトルク電流とを比較し、励磁電流がトルク電流より大きいとき、過励磁の判断情報を出力する過励磁判定部と、前記過励磁判定部からの過励磁の判断情報と予め設定された設定情報に基て、電力変換部に制御信号を与えて、電力変換部から交流電動機に供給される出力を制御する制御部を備えたことを特徴とする。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
エレベータ制御装置
【課題】エレベータ制御装置のインバータ内のスイッチング素子の、経過時間に対する温度変化を少なくして空冷し、かつ回生抵抗器も空冷する。
【解決手段】実施形態によれば、スイッチング素子を介してインバータの直流側と接続され、電動機の回生電力を消費する回生抵抗器と、回生抵抗器およびインバータを空冷するためのファンと、乗りかごの荷重値を検出する荷重検出手段と、行先階を検出する行先階検出手段とをもつ。また、この実施形態によれば、検出した行先階と荷重値をもとに、運転開始前に、運転に伴うインバータ内のスイッチング素子と回生抵抗器の温度変化パターンを予測する温度変化予測手段と、予測した温度変化パターンをもとに、経過時間に対するインバータ内のスイッチング素子の温度変化の値が所定の基準値以下となり、かつ回生抵抗器が空冷されるように、ファンの駆動電圧および駆動時間を制御するファン制御手段とをもつ。
(もっと読む)
電力変換装置及び電力変換システム
【課題】更なる信頼性向上を図れる電力変換装置及び電力変換システムを提供すること。
【解決手段】上記課題を解決するために、例えば、インバータ回路は、前記モータ制御回路からのPWM信号に基づき前記インバータ回路を構成する半導体スイッチング素子を駆動するゲートドライブ回路とサージ電圧検出信号を検出するサージ電圧検出回路を備え、サージ電圧検出回路により検出されたサージ電圧検出信号はモータ制御回路に入力され、サージ電圧検出信号を検出した際に前記電流指令生成部からの電流指令値と所定の電流指令値と対比することによりサージ電圧を抑制するサージ電圧抑制手段の実施の可否を選択するような手段を設けるようにすればよい。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
電動車両および電動車両の制御方法
【課題】昇圧コンバータにおける共振の発生を回避しつつ車両挙動の急激な変動を抑制する電動車両およびその制御方法を提供する。
【解決手段】制御装置40は、PWM制御モードと矩形波電圧制御モードとを選択的に切替えてインバータ20を制御する。制御装置40は、モータジェネレータMGの回転数が所定範囲内となることによって平滑コンデンサCおよび昇圧コンバータ10のリアクトルLにより形成されるLC回路の共振条件が成立したとき、モータジェネレータMGのトルクを制限することによって矩形波電圧制御モードでのインバータ20の制御を禁止する。さらに、制御装置40は、上記共振条件の成立に伴なうトルクの制限およびその解除時にトルクの変化率を制限する。
(もっと読む)
モータ駆動制御システム
【課題】モータ駆動制御システムにおいて、交流電動機の駆動制御に支障を来たすことなく、交流電動機に流れる電流を検出する電流センサの故障診断を高い信頼性をもって行なうことを可能とする。
【解決手段】相電流演算部320は、電流センサ180による母線電流Idcの検出値と、インバータ140のスイッチング素子Q3〜Q8のオン・オフの組合せを示すスイッチングパターンとに基づいて、交流電動機200の相電流を推定する。相電流比較部330は、相電流演算部320による相電流の推定値と、電流センサ240による相電流の検出値との比較結果に基づいて、電流センサ240の故障を診断する。制御部340は、交流電動機200の駆動に基づく暗騒音が発生しているときに電流センサ240の故障診断の実行期間を設けるとともに、故障診断の実行期間中は、制御指令演算部310で用いる搬送波の周波数を一時的に低下させる。
(もっと読む)
出力電流および出力電圧の測定に基づくトルクオブザーバ
【課題】電力変換器により給電される車両用3相駆動電動機のトルクを推定するための方法であって、3つの相線路が電力変換器から駆動電動機に導くことによって、車両用駆動電動機のトルクを確実に推定する。
【解決手段】3つの相線路6,7,8のうち少なくとも2つの相線路においてそれぞれ電流i1,i2,i3が測定され、3つの相線路6,7,8においてそれぞれ電圧u1,u2,u3が測定される。測定された電流又は測定された電圧から回転磁界周波数がが求められる。最終的に、測定された電流と、測定された電圧と、求められた回転磁界周波数とからトルクが推定される。
(もっと読む)
モータ駆動装置及びモータ駆動方法
【課題】一方の極性の電流しか検出できないスイッチング素子に内蔵される検出用素子により電流を検出してモータを制御する場合、力行状態と回生状態とを判定して通電を制御することで脱調を回避する。
【解決手段】グランド側に接続される各相の半導体スイッチング素子に電流検出機能付きのIGBT4X〜4Zを用いてインバータ回路3を構成する。極性検出部は、IGBTを全てオンしてモータ1の各相巻線2U,2V,2Wが短絡されているときにセンスIGBT7X,7Y,7Zを介して流れる電流に基づきU,V相間電流のゼロクロスタイミングを検出し、変化極性検出部は、U,V相間電流の変化量のゼロクロスタイミングを検出する。電流極性検出回路11がW相電流の極性を判定すると、力行・回生判定部は、W相電流の極性に応じてモータが力行状態か回生状態かを判定し、起動処理部は、回生状態と判定されるとスイッチング制御を停止する。
(もっと読む)
駆動装置
【課題】昇圧コンバータのリアクトルの電流を検出する電流センサに異常が生じているときに、より適正に対処する。
【解決手段】リアクトルの電流を検出する電流センサに異常が生じているときには(S120)、電流センサに異常が生じていないときの許容上限電圧VHlim1より低い許容上限電圧VHlim2で駆動電圧系の目標電圧VHtagを制限して駆動電圧系の電圧指令VH*を設定し(S160)、電圧センサからの電圧(駆動電圧系の電圧)VHと電圧指令VH*とを用いたフィードバック制御によって目標デューティ比Duty*を設定し(S170)、設定した目標デューティ比Duty*を用いて昇圧コンバータを制御する(S180)。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
船舶用電気推進装置
【課題】蓄電池設備の容量(設置スペースおよび重量)を大きくせずに、船舶航行中の電池切れを防止するようにした電気推進装置を提供する。
【解決手段】陸上電源8から船舶内の蓄電池3を充電し、その電力によって推進用電動機2を駆動する船舶用電気推進装置において、船舶の目的地までの距離S1、速度の計画値v1、推進用電動機の消費電力計画値P1からなる第1群のデータまたは、GPS28、電力検出器32で実測された距離S2、速度v2、推進用電動機2の消費電力P2からなる第2群のデータのいずれかと蓄電池の電池残量A1とから、目的地まで到達可能な推進電動機の消費電力上限値を求め、電力上限値を推進用電動機2に印加された電圧で除算してトルク分電流上限値IqLIMを求め、推進力指示器によって設定される推進用電動機のトルク分電流指令値Iq*がトルク分電流上限値IqLIMを超えないように制限して推進用電動機2を駆動する。
(もっと読む)
電源システムおよびその制御方法
【課題】コンバータおよびインバータを有する電源システムにおいて、コンバータでの電力損失低減と、蓄電装置に入出力される電流のリップルの抑制とを両立する。
【解決手段】バイパス回路40は、バイパスリレーBRLのオンにより、蓄電装置Bおよび電力線7の間に、コンバータ12をバイパスした電流経路を形成する。コンバータ12による昇圧動作が不要である動作状態では、電力線7での直流電流IHの大きさに応じて、バイパス回路40を動作させるとともにコンバータ12を停止させる第1のモードと、バイパス回路40を停止するとともにコンバータ12を動作させる第2のモードとが選択される。第2のモードでは、コンバータ12は、スイッチング素子Q1をオンに固定することによって、リアクトルL1を経由する電流経路を蓄電装置Bおよび電力線7の間に形成する。
(もっと読む)
昇圧コンバータの制御装置
【課題】駆動電圧系の電圧の目標電圧への追従性を向上させる。
【解決手段】昇圧コンバータのデューティ指令値Dutyは、電池電圧系電力ラインの電圧VLから昇圧されている駆動電圧系電力ラインの電圧VHとバッテリの充放電電力とが変動していない所定の定常状態のときには前回Dutyから前回Dffを減じることにより更新されると共に所定の定常状態でないときには更新されずに保持される力行時推定項Dadj1または回生時推定項Dadj2と(S150,S160,S260,S270)フィードフォワード項Dffとフィードバック項Dffとの和として設定される(S220,S330)。即ち、所定の定常状態でない状態になったときでも、フィードバック項Dfbとは別に、装置の個体差に応じた値として所定の定常状態のときに更新される力行時推定項Dadj1または回生時推定項Dadj2を一部に加えてデューティ指令値Dutyが設定される。
(もっと読む)
埋込型永久磁石同期電動機の駆動装置
【課題】埋込型永久磁石同期電動機(IPMSM)の駆動装置が開示される。
【解決手段】埋込型永久磁石同期電動機(IPMSM)の回転子の位置及び速度を測定する検出部を含むシステムにおいて、弱磁束制御の第1領域の第1電流指令を受信して、IPMSMを駆動するための本発明の装置は、過変調された電圧情報を修正部に伝達する帰還部と、回転子速度と過変調された電圧情報を用いて、第1電流指令を弱磁束制御の第2領域の第2電流指令に修正する修正部と、第2電流指令を制御して、電圧を出力する制御部と、制御部の出力をインバータ部が合成可能な最大電圧に制限する第1制限部と、第1制限部の出力から、指令トルクに追従するための3相の電圧指令をIPMSMに印加するインバータ部と、を含む。
(もっと読む)
電動機駆動装置
【課題】リアクトル電流を検出してコンバータの制御に用いるものにおいて、リアクトル電流を精度をより向上させる。
【解決手段】昇圧コンバータが動作中で且つオフセット学習が完了しているときには(S100,S110)、バッテリの充放電電流IbからリアクトルLの電流ILを減じた電流差を補正量ΔILに設定し(S130)、リアクトルLの電流ILとオフセット学習量IL0と補正量ΔILとの和を昇圧コンバータ55の制御に用いるリアクトル電流ILとして設定する(S140)。これにより、リアクトル電流ILの精度をより向上させることができ、ひいては昇圧コンバータ55の制御性をより向上させることができる。
(もっと読む)
121 - 140 / 1,845
[ Back to top ]