
Fターム[5H540BB09]の内容
Fターム[5H540BB09]に分類される特許
1 - 20 / 102
線形運動デバイスの制御装置、線形運動デバイスの制御方法
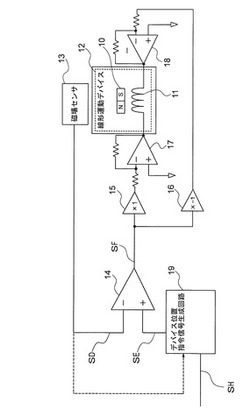
【課題】検出磁場がコイル磁場の干渉を受ける場合にも、制御可能な範囲が変化しない線形運動デバイスの制御装置を提供する。
【解決手段】線形運動デバイス12の磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12を移動すべき目標位置を指示する目標位置信号SHに基づくデバイス位置指令信号SEを補正して出力するデバイス位置指令信号生成回路19、出力信号SD、デバイス位置指令信号SEの偏差を示す操作量信号SFを出力する差動増幅器14、操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって制御装置を構成する。デバイス位置指令信号生成回路19は、デバイス位置指令信号SEをコイル電流によって発生する磁場に対応する補正値によって補正する。
(もっと読む)
リニア搬送装置

【解決手段】 リニア搬送装置3は、複数の永久磁石13aからなる可動子13と、複数のコイル14aからなる複数の固定子14と、上記可動子13の永久磁石13aの磁界を検出するホール素子17とを備えている。
さらに、上記可動子13における先頭の永久磁石13aよりも搬送方向後方に検出片18を設けるとともに、当該検出片18を検出するセンサ19を上記可動子13の搬送経路上に設ける。
上記ホール素子17が検出した可動子13の先頭の永久磁石13aの磁界から可動子13の位置を認識すると、当該認識した可動子13の位置を仮位置とし、さらに上記センサ19が上記検出片18を検出すると、当該センサ19が検出片18を検出した位置を可動子13の実位置として上記仮位置から置き換え、当該可動子13の実位置を基準に可動子13の位置を認識する。
【効果】 可動子の位置を高精度に認識することができる。
(もっと読む)
球面モータの制御装置および球面モータの制御方法
【課題】3自由度以上の回転が可能な球面モータの動作制御を直感的に把握し易い状態で行う。
【解決手段】任意の方向に回転が可能な概球回転体の運動に係る信号出力に基づき、球面モータ300のロータを動作させるために、球面モータ300の界磁コイル309への通電パターンを生成する界磁コイル通電パターン生成部201と、前記通電パターンに基づく駆動信号を出力する駆動信号出力部202とを備える。
(もっと読む)
リニアモータ装置とリニアモータ装置を駆動する方法
【課題】スイッチングリップルによる他の駆動回路への影響を低減したリニアモータ装置とリニアモータ装置を駆動する方法とを提供することを目的とする。
【解決手段】ライン状に整列され、順次電流駆動される複数のリニアモータと、複数のリニアモータコイルの各々に隣接して配置される複数のリップル相殺用リニアモータと、を備えリップル相殺用リニアモータは、隣接するリニアモータが電流駆動される場合に、リニアモータにより生成される磁界を低減させるように、リップル相殺用リニアモータのコイルにリップル成分のみを供給するリニアモータ装置とする。
(もっと読む)
リニア振動モータの駆動制御装置、リニア振動モータの駆動制御方法および小型電気機器
【課題】電源電圧の低下に起因する動作と、特定の制御モードへの切り換えに起因する動作との混同を抑制することができるリニア振動モータの駆動制御装置、リニア振動モータの駆動制御方法および小型電気機器を提供する。
【解決手段】リニア振動モータの停止制御の開始前後における振動振幅の時間的変化の度合いを、通常の制御モードから他の制御モードへの遷移の前後における度合いよりも小さくする。そのようにすることで、リニア振動モータの停止制御の開始前後における作動音の変化の度合いを、制御モードの遷移前後における作動音の変化の度合いよりも小さくすることができる。すなわち、作動音の変化の度合いの違いによって、電池残容量の低下に伴う停止制御に起因する作動音の変化なのか、制御モードの遷移に起因する作動音の変化なのかを、ユーザは聴覚を通じて識別することが可能となる。
(もっと読む)
制御装置、及び制御方法
【課題】位置フィードバック機構を用いたモータの制御において、整定時間を短縮することができる制御装置を提供する。
【解決手段】制御装置は、外部より一定間隔ごとに入力される位置指令値から位置指令値の変化量を算出し、算出した変化量に基づいて、モータにおいて生じる位置指令値に対する動作の遅れを補正する補正値を算出する位置指令補正部と、補正値により位置指令値を補正した補正位置指令値に応じた電力をモータに供給する駆動部とを具備する。
(もっと読む)
洗濯機の制振装置
【課題】洗濯槽重量のアンバランスに応じた最適な制振制御を、リニアモータのベクトル
制御を用いることでリアルタイムに行うことができる制振装置を提供する。
【解決手段】洗濯槽と筐体の間に配置されたリニアモータおよび弾性体と、前記リニアモ
ータの巻線に通電される電流を検出し、電流信号を出力する電流検出手段と、前記リニア
モータの可動子の相対位置を検出して前記可動子の移動距離を演算する位置演算部と、前
記洗濯槽または前記筐体の加速度を検出し、加速度信号を出力する加速度センサと、前記
移動距離、前記加速度信号および前記弾性体の弾性定数に基づき、加振力信号を演算する
加振力演算部と、前記加振力信号と目標振動値との差分に基づき、指令q軸電流値を出力
するトルク制御部と、前記電流信号と、前記指令q軸電流値に基づいて、前記巻線に対す
る通電を制御する通電制御手段とを有することを特徴としている。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータがどのような状態であっても、その固有振動数にできるだけ近い周波数で駆動する。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを非通電期間を挟んで交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。誘起電圧検出部30は、非通電期間において、コイルL1に発生する誘起電圧を検出する。ゼロクロス検出部40は、誘起電圧検出部30により検出された誘起電圧のゼロクロスを検出する。駆動信号生成部10は、ゼロクロスの検出位置からリニア振動モータ200の固有振動数を推定し、駆動信号の周波数を、当該固有振動数に近づける。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの固有振動数と駆動信号の周波数とが一致するよう、駆動信号の周期幅を適応的に制御する際、コイルに発生する誘起電圧のゼロクロスの検出精度を高める。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを非通電期間を挟んで交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。駆動信号生成部10は、非通電期間においてコイルL1に発生するゼロクロスの検出位置からリニア振動モータ200の固有振動数を推定し、駆動信号の周波数を、当該固有振動数に近づける。ゼロクロス検出部40は、誘起電圧以外の電圧のゼロクロスの検出を回避するための検出窓を設定し、その検出窓内で検出されたゼロクロスを有効とし、その検出窓外で検出されたゼロクロスを無効とする。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動終了時における振動停止時間を短縮する。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号を生成する。駆動部20は、逆位相の駆動信号に応じた逆位相の駆動電流をコイルL1に供給することにより、リニア振動モータ200の停止を早める。
(もっと読む)
リニア同期モータ
【課題】 固定子の製造コストを低減して、磁気損失の少ないリニア同期モータを提供する。
【解決手段】 一方の端部磁極部33の第1の一対の被連結部分47と、エンドブラケット35の第1の一対の被連結部分51と、端部磁極部37の第1の一対の被連結部分55と、5個の磁極部39の第1の一対の被連結部分59とを一対の磁性筒体41によって接続する。一方の端部磁極部33の第2の一対の被連結部分と、端部磁極部37の第2の一対の被連結部分と、5個の磁極部39の第2の一対の被連結部分とを一対の導磁性成形品43により接続する。一対の磁性筒体41にリニア軸受65を介して一対のガイド軸9をスライド可能に嵌合する。一対の磁性筒体41及び一対の導磁性成形品43によりヨークを構成する。5個の磁極部39のそれぞれを、複数枚の磁性鋼板を軸線方向に積層して構成する。
(もっと読む)
ホール素子を用いたポンプ装置
【課題】往復運動するマグネットの磁力を検出するホール素子を用い、回路基板の制御によりポンプの運転状況を正確に把握する。
【解決手段】軸方向に着磁した円筒型マグネット3の貫通路3aの両側にテーパ状に拡がる流体通路5a,6aを形成し入口側に逆止弁7を設けた磁石可動体2と、磁石可動体をスライド可能に収容し磁石可動体の両側にスプリング8,8aを配した上で、入口側に吸入ノズル10を出口側に逆止弁12付き吐出ノズル11を取り付けて外周に2つの駆動コイル13,13aを巻き、外側に2つの半月状に湾曲した外周磁性体15,15aを挟着したシリンダ9と、シリンダと共にケース17,17aに収納され両駆動コイルに対し同極が対向するように、且つ電流波形に電流が流れない区間を設けた交流を印加することで、磁石可動体を往復運動させ駆動状況をホール素子14で検知する回路基板16とからなる。
(もっと読む)
リニアモータ制御装置
【課題】各固定子巻線における相間電圧の不平衡を正確に推定し、固定子巻線の温度変化に伴うリニアモータのモデル化誤差やセンサ測定誤差の影響を抑制し、相間電圧の不平衡に起因する推力リプルを低減させることができるリニアモータ制御装置を提供する。
【解決手段】固定子巻線が界磁可動子の移動方向に複数区分されたリニアモータを、位置センサが検出する界磁可動子位置に基づいて区分毎に備えられた電力変換器を切替えて、界磁可動子を移動させるように固定子巻線に電力を供給するリニアモータ制御装置であって、界磁可動子が移動する際、全ての固定子巻線の相間電圧が平衡するように構成した。
(もっと読む)
リニアモータ
【課題】リニアモータを小型化することにある。
【解決手段】外周面にコイル組立体20が取り付けられるロッド11と、ロッド11を囲むように磁石組立体14が装着されるモータケース12とを有するリニアモータであって、円筒形状の2つの永久磁石15a,15bを相互に同極性の磁石端面を隣接させて磁石組立体14を形成し、それぞれ永久磁石15a,15bの半分の軸方向長さを有する8つのコイル21を相互にコイル端面を隣接させてコイル組立体20を形成する。コイル組立体20のうち1組以上のコイル21の隣接されたコイル端面の極性を同極性励磁して径方向集中磁束を生じることにより磁石組立体14の磁束を引き付け、コイル組立体20の軸方向先端側から軸方向基端側に向けて同極性励磁を移動励磁する。
(もっと読む)
リニアスケール、リニアモータ、及びリニアモータの制御装置
【課題】低廉なコストで基準点からの精緻な距離を求めること。
【解決手段】スケールの磁性体26、27が生成する磁束密度に応じた波形信号を出力するスケール検出手段を設ける。このスケール検出手段は、当該スケールの移動方向Xにおいて、同一位相の正弦波信号A(B)を出力して当該スケールを連続的に検出するように前記スケール長に対応する一定の間隔を隔てて配置された複数のセンサ17a、17b(18a、18b)であり、前記スケールの両端部は、同一極性に設定されているとともに、単独のセンサ17a、17b(18a、18b)で検出された際の出力電圧が、残余の部位が単独のセンサ17a、17b(18a、18b)で検出された際の出力電圧の1/2となるような仕様に決定されている。
(もっと読む)
リニアエンコーダ
【課題】 電源投入時の立ち上がり時間を短縮させることが可能なリニアエンコーダを提供すること。
【解決手段】 リニアスケールには、位置情報としてインクリメント位置を示す複数の情報を所定ピッチで記録したインクリメント指標部と、インクリメント位置とは別の基準点位置を示す複数の情報を所定ピッチで記録した基準点位置指標部と、インクリメント位置及び基準点位置とは別の位置情報を持つアブソ信号を記録したアブソ指標部とが設けられ、隣接する任意の基準点位置間に含まれるアブソ信号の組み合わせが他の基準点位置間に含まれるアブソ信号の組み合わせの何れとも異なるように設定され、信号処理部は上記検出ヘッドの検出素子からの検出信号に基づいてアブソ信号の組み合わせを読み取り、予め記憶していたテーブルと比較して可動部のリニアスケール上の絶対位置を求めるように構成されているもの。
(もっと読む)
モータ駆動装置
【課題】コストの低減を図りつつ、コイル間の特性のバラツキに起因する特性の劣化を抑制する。
【解決手段】入力される駆動指令信号S1及び設定された駆動特性値に基づいて駆動信号を出力するフィルタ11と、フィルタ11からの駆動信号に応じてコイル2に供給する電流を出力するPWM駆動部12と、複数のコイル2の特性毎に予め求められたパラメータが記憶されたメモリ14と、入力される特性選択信号S2に対応するパラメータに基づいて、フィルタ11が用いる駆動特性値を変更して設定する特性設定部13とを備えている。
(もっと読む)
リニアモータおよびリニアモータ装置
【課題】低価格で簡単な構成で位置検出可能なリニアモータを提供する。
【解決手段】リニアモータ1Aは、固定子3と、固定子3に対して移動可能に配設されている可動子2と、1対のホール素子17A、17B、1対の第3、第4のホール素子19A、19Bとを有する。ホール素子17A、17Bは、可動子2に配設される隣接する1対の磁極の幅Paの(1/4)の距離を隔ててリニアモータの長手方向に配設され、かつ、磁極の磁界に感応する距離を隔ててリニアモータの長手方向と直交する方向に配設され、90°の移動範囲の可動子の位置を検出することが可能である。第3、第4のホール素子19A、19Bは、可動子の絶対位置を検出するために使用する。
(もっと読む)
移動装置
【課題】非常時であっても確実に可動部を停止させることができるとともに装置に損傷を与えること防止する移動装置を提供する。
【解決手段】搬送装置10は、可動部としてのリニアステージ12を移動させるリニア搬送部11と、電力の供給を受けてリニア搬送部11を駆動する駆動手段としてのサーボドライバ13と、サーボドライバ13に電力を供給する電力供給手段としての電力装置14と、強制停止指示が入力される強制停止入力部16と、前記強制停止指示の入力に応じてサーボドライバ13の駆動状態を制御し、リニアステージ12を停止させる制御コンピュータ19と、前記強制停止指示の入力に応じて、前記入力から所定時間の経過後に、サーボドライバ13への電力の供給を停止する電力遮断部32とを備えたことを特徴とする。
(もっと読む)
多相リニアモータの駆動装置、及びこれを備えている駆動制御装置
【課題】製造コストの上昇を抑えつつも、各相毎に複数のコイルを備えている多相リニアモータの可動子を正確に制御する。
【解決手段】モータドライバ回路14に直列接続され、対応相の全コイルに駆動電流が供給されているときに、全コイルとの合成インピーダンスを対応相の一部のコイルの合成インピーダンスと等価にするインピーダンス調整コイル17と、対応相の全コイルに駆動電流を供給するときに、モータドライバ回路30とインピーダンス調整コイル17と全コイルに関する電力供給切替スイッチ19a〜19gとを直列接続させ、対応相の一部のコイルに駆動電流を供給するときに、インピーダンス調整コイル17を経ずに、モータドライバ回路30と一部のコイルに関する電力供給切替スイッチとを直列接続させるインピーダンス調整スイッチ18と、を備えている。
(もっと読む)
1 - 20 / 102
[ Back to top ]