
Fターム[5H540FA01]の内容
Fターム[5H540FA01]の下位に属するFターム
位置検出器を用いるもの (120)
位置検出器を用いないで検出するもの (22)
Fターム[5H540FA01]に分類される特許
1 - 20 / 23
位置検出装置
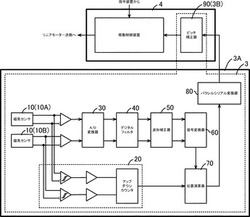
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
リニアモータの制御判断方法および制御装置

【課題】可動子を曲線状にも移動させるリニアモータにおける、制御可能性を判断する。
【課題手段】可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサの読みを用いて、(1)第1の信号の2乗と第2の信号の2乗との和を算出し、(2)2乗和が所定の値以上にあるとき、リニアモータが制御可能であると判断して、リニアモータの制御を行う。
(もっと読む)
ボイスコイルモーター
【課題】ボイスコイルモーターの提供。
【解決手段】ボイスコイルモーターは、可動磁気回路部品43、固定回路部品44、位置感知センサー420、保存媒体421、コントローラー42を備え、可動磁気回路部品43は永久磁石を備え、しかも負荷設置スライド台を物理接続し、固定回路部品44はコイルにより構成し、位置感知センサー420は可動磁気回路部品43の所在位置を探知でき、信号増幅器により位置電気値を出力し、コントローラー42が保存媒体421より、増益値と偏移量補償値とを読み取り、増益値と偏移量補償値に基づき校正後の位置電気信号値は、固定回路部品44のコイルに電力を獲得させた後、固定回路部品44と可動磁気回路部品43が提供する磁力の相互作用の下、負荷設置スライド台は移動範囲内の上端点と下端点との間で移動する。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
モータ駆動装置
【課題】磁極位置検出手段の情報を簡単に確認する方法を提供する。
【解決手段】磁極位置情報を出力する磁極位置検出手段と、磁極位置情報から磁極位置表示データ情報を出力する表示データ作成手段と、前記磁極位置表示データ情報を表示するデータ表示手段とを有することを特徴としたモータ駆動装置とする。
(もっと読む)
リニアモータおよびリニアモータ駆動システム
【課題】簡易でより精度の高い位置決めが可能なリニアモータおよびリニアモータの駆動システムを提供することを課題とする。
【解決手段】固定子10と可動子20とが互いに相対運動するリニアモータ1であって、可動子に設けられ、相対運動の方向に異なる磁極のマグネットが交互に並べられ、可動子の位置を検出するための位置検出用マグネット部25と、相対運動する位置検出用マグネット部のマグネット25n、25sを検出して位置を検出するための位置検出用センサ16と、可動子に設けられ、位置検出用センサの出力を制御するためのゲート用マグネット35と、相対運動するゲート用マグネットを検出するゲート用センサ36と、を備える。
(もっと読む)
リニアモータおよびリニアモータ駆動システム
【課題】簡易でより精度の高い位置決めが可能なリニアモータおよびリニアモータの駆動システムを提供することを課題とする。
【解決手段】固定子10と可動子20とが互いに相対運動するリニアモータ1であって、可動子に設けられ、相対運動の方向に異なる磁極のマグネット25n、25sが交互に並べられ、可動子の位置を検出するための位置検出用マグネット部25と、相対運動する位置検出用マグネット部のマグネットを検出して位置を検出するための位置検出用センサ16と、相対運動する位置検出用マグネット部のマグネットを検出するゲート用センサ36と、を備え、ゲート用センサが位置検出用マグネット部を検出するとき、位置検出用センサが位置検出用マグネット部に重なる位置に配置される。
(もっと読む)
分散配置リニアモータおよび分散配置リニアモータの制御方法
【課題】固定子の分散配置に適した分散配置リニアモータおよび分散配置リニアモータの制御方法を提供する。
【解決手段】固定子10、10Bと可動子20とが互いに相対運動するリニアモータ1であって、固定子と可動子とは、互いに磁気的に作用をする複数の種類の極(12a、12b、12c)(22a、22b)と、複数の種類の極が種類の順に相対運動の方向に周期的に配列された周期構造とを各々有し、固定子は、相対運動の方向に複数離れて配列され、隣り合う固定子の固定子間距離D1、D2が、可動子の長さLmv以下であり、固定子の極がコイル11により構成され、隣り合う固定子の固定子間距離に基づき、コイルに供給する電流を制御するする電流制御手段と、を備える。
(もっと読む)
推力リップル解析方法及び補正方法
【課題】モータで生ずる推力リップルの解析及び補正を精確に行うことができる推力リップル解析方法及び補正方法を提供する。
【解決手段】平面モータ1は固定子としての格子プラテン10と可動子としてのスライダ部20とを備えており、モータ制御装置30の制御によってスライダ部20が格子プラテン10上で移動されるとともに位置決めされる。平面モータ1で生ずる推力リップルを解析する場合には、格子プラテン10に対するスライダ部20の位置を変えながらスライダ部20を微小振動させたときの平面モータ1の応答特性を測定し、格子プラテン10に対するスライダ部20の位置に応じた平面モータ1の応答特性の変化から推力リップルを求める。
(もっと読む)
リニア電動機
【課題】重量/推力比を低減し、電力消費量を抑制するとともに運用コストの低減化が図れるリニア電動機を提供する。
【解決手段】円弧状の永久磁石の磁極がその中心軸を含む断面において最大でも90度づつ回転するよう当該永久磁石を隣接させて構成される外側永久磁石列11と、円環状の永久磁石の磁極が前記外側永久磁石列11と同じ向きの磁化ベクトル半径方向成分を有するとともに前記外側永久磁石列11と逆向きの磁化ベクトル軸方向成分を有する内側永久磁石列15を備える界磁と、前記外側永久磁石列11と前記内側永久磁石列15の間にリングの軸方向に移動できるように支持されるリング状の三相コイル31を備える電機子と、電機子に所定の推力を発生させる駆動装置9とを具備してリニア電動機を構成する。
これにより、鉄心を用いなくても電機子コイルに強い磁束を鎖交させることができ、電機子コイル全体に界磁の磁束が鎖交する。
(もっと読む)
リニアモータの推力リップル補償装置およびその補償方法
【課題】 リニアモータの推力リップルが多周期成分を含んでも、制御ゲインが低くても、高精度に推力リップルを補償し、モータの送りむらを減少させるリニアモータの推力リップル補償装置を提供する。
【解決手段】 リニアモータの推力リップル補償装置において、推力リップル補償部20は、可動子位置を入力しフーリエ基本波の位相を出力する位相計算器25と、可動子位置に基づいてフーリエ変換機能信号と係数更新機能信号を出力する操作器24と、フーリエ変換機能信号が有効となった際にフーリエ基本位相および補償推力指令に基づいてフーリエ変換を行い第1フーリエ係数を算出するフーリエ変換器23と、係数更新機能信号が有効となった際に第1フーリエ係数を入力してデータ更新し第2フーリエ係数を出力するバッファ22と、第2フーリエ係数を用いてフーリエ基本位相に基づいて逆フーリエ変換を行いリップル補償値を算出する逆フーリエ変換器21とで構成した。
(もっと読む)
移動体システム
【課題】走行ルートに対する移動体の座標を既存のセンサで求めることにより、各ゾーンに複数台の移動体を走行させることができるようにする。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のリニアモータのコイルを制御する。コイルのリニアスケールからのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換する。
【効果】移動体の位置を走行ルートを基準に表現すると、移動体間の距離を求めることができ、1ゾーンに複数台の移動体を走行させることができる。
(もっと読む)
テーブルの制御方法およびその装置
【課題】ガントリータイプのテーブルにおいて、塗布速度への立ち上げが指令速度に対して遅れるために有効な塗布面を得るには塗布速度の高速化や除外距離(塗布を始めてから塗布膜厚の変動率が要求仕様に収まるまでの走行距離)の短縮も望まれており、速度制御への要求内容は厳しいものとなっているため、これに対応する。
【解決手段】クロスカップリング制御とゲイン切替制御の方式において、塗布速度到達時のオーバーシュートをおさえ、それ以降は速度ムラをおさえるために、中心速度コントローラのゲイン切替のみを行っていたが、左右偏差コントロールのゲインを加速時に大きくして加速終了後に小さくした。
(もっと読む)
シリンダとリニアモータ駆動ピストンの間の衝撃を検出する方法、シリンダとリニアモータ駆動ピストンの間の衝撃の検出器、ガスコンプレッサ、リニアモータ駆動のシリンダ・ピストンセットのための制御システム
本発明は、ガスコンプレッサのシリンダ2とリニアモータ駆動のピストン1の間において、衝撃又は衝突の発生を検出することができる方法を開示する。当該方法は、i)ピストンが上死点に位置する前にリニアモータの電気出力に関連する基準信号Srを得る段階と、ii)ピストンが上死点に位置した後にリニアモータの電気出力に関連する検出信号Sdを得る段階と、iii)基準信号Srと検出信号Sdを比較する段階と、iv)ステップiii)の比較の結果が、予め設定した許容値を考慮して、シリンダ2とピストン1の間の衝撃から発生する変化を示すということを検出信号Sdが示す時に衝撃の発生を記録する段階とを備えている。本発明は、また、上述の方法を実施することができる電子検出装置を開示している。本発明は、また、ガスコンプレッサ100と、上述の検出器を備えた制御システムに関する。  (もっと読む)
(もっと読む)
位置決め装置、露光装置及びデバイス製造方法
【課題】 テーブルを駆動するアクチュエータへの電流供給路の断線の検知を、簡単な構成でかつ確実に行うことができる位置決め装置を提供すること。
【解決手段】 ステージ1を駆動するアクチュエータ2と、アクチュエータ2に電流を供給するドライバ3との間に電流供給路42が接続され、この電流供給路42に途中には電流検出器8が設けられる。電流供給路42は複数の経路を有し、電流検出器8は、上記複数の経路のうちの少なくとも1つの経路の電流に基づいて電流供給路42の断線を検知する。
(もっと読む)
電流駆動型アクチュエータ駆動制御装置
【課題】電流駆動型アクチュエータ駆動制御装置において、コストを抑制して速度フィードバックを可能とすることである。
【解決手段】気体圧サーボ弁の位置決め制御システム10において、スプール24の位置を変位センサ42で検出し、位置指令52と比較してその偏差に対し、ゲインG1を乗じて速度指令とし、速度指令と制御対象の速度と比較し、その偏差に対しゲインG2を乗じて駆動指令とし、これを電流ブースタ62に出力する。電流ブースタ62は、駆動指令を駆動電流に変換してフォースモータ40の可動線輪36に供給し、スプール24を移動させる。電流ブースタ62の出力は速度演算器66によって積分演算されて速度情報に変換され、速度フィードバックループ67によって減算器58に戻される。振動除去装置に置いても同様に速度演算器による速度フィードバックを行うことができる。
(もっと読む)
リニアパルスモータ
【課題】加速度を上げても振動が発生せず、なめらかに位置指令値に追従できるリニアパルスモータを実現する。
【解決手段】電流指令値と、位置指令値より変換される電気角指令値に基づいてスライダをマイクロステップ駆動するリニアパルスモータにおいて、前記スライダに与えられる加速度信号と前記スライダの質量に基づいて前記スライダの必要推力量を算出する必要推力算出手段と、算出された前記必要推力量と前記電流指令値に基づいて電気角フィードフォワード量を算出する電気角フィードフォワード量算出手段と、算出された前記電気角フィードフォワード量に応じて前記電気角指令値を補正する補正手段と、を備える。
(もっと読む)
リニア振動アクチュエータとそれを用いたリニアコンプレッサーおよびリニア振動発電機
【課題】ばね定数と可動部の質量から決定される共振周波数をもつリニア振動アクチュエータやリニア振動発電機において、共振周波数以外の周波数で駆動しても高効率となる制御方法を提供する。
【解決手段】可動子3の変位x20は変位センサ14で検出されて、制御装置21内のゲインコントローラ24にフィードバックされている。ゲイン決定手段25は、駆動周波数f26と変位x20に基づいてゲイン可変指令27を出力する。電流指令Ic29から変位x20にゲインK28が乗じられた信号が減算されて合成電流指令Ic*22となる。ゲイン可変信号27によって、ゲインK28を可変させることができる。このようにすることで、駆動周波数に見かけの共振周波数を常に一致させることができて従来法よりも高効率駆動が可能となる。
(もっと読む)
可動テーブルの制御装置およびそれを備えた可動テーブル装置
【課題】 ケーブル重量を考慮してアクチュエータに推力を分配することで、位置決め精度を高め、整定時間を短縮し、高性能な制御が可能な可動テーブル制御装置を提供する。
【解決手段】 固定部との間に電力線などのケーブルによって接続された可動テーブル107を駆動するアクチュエータ105及び106と、該アクチュエータの発生する推力を制御するアクチュエータ推力制御器103及び104と、可動テーブル107の位置指令から重心まわり推力指令を算出する制御器101と、重心まわり推力指令をアクチュエータ推力指令に変換する推力指令変換器10とを備えた可動テーブル制御装置において、推力指令変換器10が可動テーブル107のみの重心位置をケーブル込み重心位置に換算する重心位置変換器12と、可動テーブル107の位置指令値またはフィードバック値を用いてケーブルのテンションを算出するケーブルテンション算出器13と、を備える。
(もっと読む)
モータ制御装置
【課題】回生制動を行わせるモータ制御装置に関し、衝撃的な急制動ではなく、且つ完全停止までの時間を短縮可能とする減速特性で回生制動を行わせる。
【課題を解決するための手段】
直流モータや交流モータ等のモータ1の駆動電源装置2の障害発生時に、モータ1を回生制動するモータ制御装置に於いて、駆動電源装置2からモータ1に駆動電圧を印加できない障害発生を検出する障害検出部5と、この障害検出部5による障害検出時にオンとするトランジスタ等から構成されたスイッチ回路3と、このスイッチ回路3をオンとした時に、モータ1と並列に接続し、モータ1の回生電圧を印加して、予め設定した定電流が流れる特性とした定電流回路4とを備えている。
(もっと読む)
1 - 20 / 23
[ Back to top ]