
Fターム[5H560UA05]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の最終制御素子 (2,026) | 半導体素子 (1,954) | トランジスタ (1,852) | FET (1,265)
Fターム[5H560UA05]の下位に属するFターム
IGBT (511)
Fターム[5H560UA05]に分類される特許
21 - 40 / 754
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることでカウントアップを開始する。複数の通電パターンのうち、第1の通電パターンによる通電を指令し、コイルに流す電流をオフした後、該コイルに流れる回生電流がゼロになるまでに要する時間が経過したら、続く第2の通電パターンによる通電を指令する信号を出力する。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法

【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることで計数を開始する。制御装置は、複数の通電パターンのうち、第1の通電パターンによる通電を指令し、第1の通電パターンの通電を指令する信号を出力してから、カウンタから所定の時間が経過した信号を受け取ったら、続く第2の通電パターンによる通電を指令する信号を出力すると共に、カウンタのカウント値を初期化する。
(もっと読む)
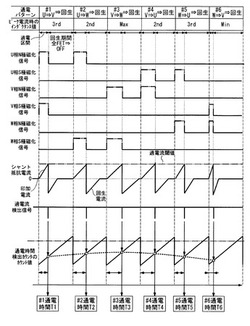
ブラシレスファンモータの駆動装置、及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ駆動装置
【課題】モータ性能を向上するモータ駆動装置を提供することにある。
【解決手段】モータ駆動装置100は、モータを駆動するモータ駆動信号を生成する駆動信号生成部120と、この駆動信号生成部120の前段に設けられ、プルアップ動作時、駆動信号生成部120のスイッチがオン/オフする時発生される電磁波妨害によって引き起こされるモータの振動またはノイズを防止するように、駆動信号生成部120の電流を調節する電流制御部110と、駆動信号生成部120から出力されるモータ駆動信号に基づいてモータを駆動する駆動部130とを含む。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】ブラシレスモータの駆動制御装置から外部の上位制御装置に送信される回転速度情報の認識精度を維持する。
【解決手段】ブラシレスモータを外部の上位制御装置からの制御指令に基づいて駆動制御するブラシレスモータの駆動制御装置において、ブラシレスモータの回転速度情報、又はブラシレスモータ及びブラシレスモータの駆動制御装置に発生した異常の内容を表す異常情報を、PWM信号により外部の上位制御装置に送信するときに(S408)、PWM信号の周波数を、回転速度情報又は異常情報に応じて設定し(S406,S407)、PWM信号のデューティ比を、異常が発生したときと発生していないときとで異なる値D1,D3に設定する(S403,S405)。また、異常が発生した場合、ブラシレスモータが回転可能であるときには、デューティ比をさらに異なる値D2に設定して(S404)、周波数を回転速度情報に応じて設定する(S406)。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの過渡状態において脱調が起こり難くする。
【解決手段】ブラシレスモータが第1の回転速度N1未満で回転駆動する低速運転領域では、非通電相の相電圧と閾値との比較結果に応じて通電モードを切り替える。ブラシレスモータが第1の回転速度N1以上かつ第2の回転速度N2以下で回転駆動する中速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立し、かつ、その状態から所定角度回転するのに要する時間が経過したとき、又は、非通電相の相電圧が所定電圧を横切った第1の条件が成立したときに、通電モードを切り替える(S362〜S368)。また、ブラシレスモータが第2の回転速度N2より速く回転駆動する高速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立したときに、通電モードを切り替える(S362、S369)。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、発熱を抑制しつつ検出する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータの相電流に基づいてロータ位置を決定するとそのロータ位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が、電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出する場合、PWM信号生成手段は、電流検出手段がPWM信号の搬送波周期内で固定された2点のタイミングで2相の電流を検出可能となるよう3相のPWM信号パターンを生成する。電流判定手段は、検出された3相電流の大小関係を判定し、PWM信号生成手段は、3相間のPWMデューティ比を維持した状態で、検出された3相電流のうち最大相の通電期間をゼロ又は最小とするようPWM信号パターンを補正する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータにおける脱調の発生を抑制する。
【解決手段】3相ブラシレスモータの2相に通電する通電モードを非通電相に誘起される誘起電圧に基づいて切り替えるブラシレスモータの駆動装置において、目標回転速度に応じたPWM信号のデューティ比である目標デューティ比Dtが誘起電圧を検出可能なデューティ比の下限である検出限界値Dlim未満となった場合に、PWM信号の周期に応じて誘起電圧を検出するための検出タイミング(1/N)を設定し(S349)、検出タイミングにおけるPWM信号のデューティ比である検出時デューティ比D1をDlimに制限する(S350)。また、連続する検出タイミング間において、Dlimに制限された検出時デューティ比D1と、誘起電圧を検出しないときの非検出時デューティ比D2〜DNと、を加算平均した平均デューティ比がDtに近づくようにD2〜DNを設定する(S351)。
(もっと読む)
PWM信号出力回路
【課題】モータに流れる電流が急激に変化することを抑制しつつ静かにモータを回転させることができるPWM信号出力回路を提供する。
【解決手段】第1のデューティ比のPWM信号を出力する第1出力部と、モータの回転速度に応じた周期を有するとともに論理レベルが交互に変化する速度信号の論理レベルが変化すると、速度信号の論理レベルが変化してから速度信号の論理レベルが次に変化するまでの間に、モータのモータコイルに流れる電流を増加させた後に減少させるべくデューティ比が第2のデューティ比に向かって上昇した後に第2のデューティ比から低下するPWM信号を出力する第2出力部と、速度信号の論理レベルが変化してから速度信号の論理レベルが次に変化するまでの間に、デューティ比が入力信号のデューティ比に向かって上昇した後に入力信号のデューティ比から低下するPWM信号を出力する第3出力部と、を備える。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、リップルの発生に基づく騒音を抑制しつつ検出する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段はモータの相電流に基づいてロータ位置を決定するとそのロータ位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が、電流検出素子に発生した信号とPWM信号パターンとに基づいて、モータの相電流を検出する場合に、PWM信号生成手段は、電流検出手段がPWM信号の搬送波周期内で固定された2点のタイミングで2相の電流を検出可能となるように、3相のPWM信号パターンを生成し、電流判定手段が検出された3相電流の大小関係を判定し、電流値が最小を示す相の通電期間を最小通電期間とすると、PWM信号生成手段は各相のPWM信号パルスより最小通電期間を減じ、最小電流検出間隔の2倍を加えて補正する。
(もっと読む)
モータ制御装置
【課題】PWM制御における搬送波周期内で、2相の電流の高周波成分を確実に検出できるように3相のPWM信号パターンを生成可能なモータ制御装置を提供する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータ磁極位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出すると、PWM信号生成手段は、電流検出手段が、PWM信号の搬送波周期内における4点のタイミングで2相の電流をそれぞれ2回検出できるように3相のPWM信号パターンを生成する。更に電流微分手段が、前記2相のそれぞれについて2回検出した電流値の差を電流微分値として出力すると、磁極位置推定手段は、その電流微分値に基づいてモータの磁極位置を推定する。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子により、モータに供給される各相の電流をより高い精度で検出できるモータ制御装置を提供する。
【解決手段】実施形態によれば、モータ制御装置は、直流を多相交流に変換する電力変換器を介してモータを駆動し、モータのロータ位置に追従するように通電パターンを生成する。通電信号生成手段は、通電制御周期内で電力変換器の直流側に接続され電流検出素子に発生する信号が少なくとも2相の電流に対応するよう通電パターンを生成し、電流検出手段は、電流検出素子に発生した信号と通電パターンとに基づき相電流を検出する。電流補正手段は検出された電流に含まれる誤差を補正し、電流制御手段は入力される電流指令値と補正された電流とに応じて通電信号生成手段が通電パターンを生成するための電流制御を行い、制御切り替え手段は、補正値演算指令を出力すると共に、前記指令の出力状態に連動して電流制御手段が電流制御を行う周期を切り替える。
(もっと読む)
PWM信号出力回路
【課題】回路規模を抑制しつつモータコイルの電流を緩やかに変化させることができるPWM信号出力回路を提供する。
【解決手段】PWM信号に基づいてモータを駆動する駆動回路に対し、PWM信号出力回路は、モータの回転速度に応じて、速度信号が一方の論理レベル及び他方の論理レベルとなる夫々の期間を検出する検出部で検出された期間を第1〜第3の期間に分割する分割部と、第1の期間において、モータコイルに流れる電流を増加させるべく、PWM信号のデューティ比が段階的に変化するようPWM信号のデューティ比を制御して出力する第1出力部と、第2の期間において、モータコイルに流れる電流を一定とすべく、入力信号のデューティ比となるようPWM信号を制御して出力する第2出力部と、第3の期間において、モータコイルに流れる電流を減少させるべく、段階的に変化するようPWM信号のデューティ比を制御して出力する第3出力部と、を備える。
(もっと読む)
モータ駆動装置
【課題】外部からアナログの制御電圧によって、PWM出力電圧デューティの演算を行い、そのPWM演算器のオフセット、ゲインばらつきの影響に対して、モータ速度を一定とするモータ駆動装置を提供すること。
【解決手段】モータ制御端子の電圧がV1「V」〜V2「V」の範囲の時に前記PWM演算器の出力電圧デューティをD1%とし、同様にV2「V」〜V3「V」の範囲の時にD2%、・・・、VN「V」〜VN+1「V」の範囲の時にDN%とするモータ駆動装置である。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
モータ制御装置
【課題】回転センサに故障が生じたときでも、モータの駆動を継続することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2の出力を用いて、モータ1が駆動される。レゾルバ2の故障時には、位置推定部60が演算する推定回転位置を用いて、センサレス制御によって、モータ1が駆動される。また、センサレス制御が行われる場合において、低速域用位置推定部61によってロータ回転位置の推定が行われる低速域では、目標電流上限値が、一定以上のロータ位置推定精度が得られる値に制限される。
(もっと読む)
21 - 40 / 754
[ Back to top ]