
Fターム[5H560UA05]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の最終制御素子 (2,026) | 半導体素子 (1,954) | トランジスタ (1,852) | FET (1,265)
Fターム[5H560UA05]の下位に属するFターム
IGBT (511)
Fターム[5H560UA05]に分類される特許
41 - 60 / 754
像担持体駆動装置、その制御方法、および制御プログラム、並びに画像形成装置
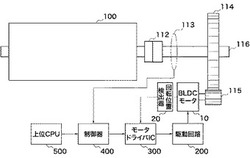
【課題】コストが増加することなく、しかもエネルギー損失を低減して、ランダムな外乱に像担持体を良好に追従させる。
【解決手段】ブラシレスDCモータ10によって感光体ドラム100などの像担持体が駆動される。エンコーダ113によって像担持体の駆動速度が検出され、制御器400、モータドライバIC300、および駆動回路200は駆動速度と予め設定された目標速度とに応じてブラシレスDCモータに流す駆動電流を制御する。また、制御器、モータドライバIC、および駆動回路は、ブラシレスDCモータを制動するためのショートブレーキ信号がオンであると、ブラシレスDCモータに流す駆動電流と逆向きの電流を生じさせてブラシレスDCモータ駆動モータの制動を行う。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法

【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
ブラシレス電気機械、それを備える装置、移動体、発電機、及びロボット
【課題】ブラシレス電気機械における磁場の利用効率を高めて電気機械の効率を向上させる技術を提供する。
【解決手段】本発明によるブラシレス電気機械は、複数の永久磁石32Uを有する第1の駆動部材30Uと、複数の電磁コイルを有し第1の駆動部材30Uに対して相対的に移動可能な第2の駆動部材10と、第2の駆動部材10を挟んで第1の駆動部材30Uと反対側に配置され、第1の駆動部材30Uとの相対的な位置関係が固定された第3の駆動部材30Lとを有する。第2の駆動部材10には、第1と第2の駆動部材の相対位置を検出する磁気センサ40A,40Bと、磁気センサの出力信号を利用してブラシレス電気機械の制御を行う制御回路とを備える。第3の駆動部材30Lは、第1の駆動部材30Uの各永久磁石と対向する位置に、各永久磁石と共同して第2の駆動部材10の位置における磁場を強める磁場強化部材32Lを有する。
(もっと読む)
DCモータ及びこれを備えたポンプ
【課題】低損失・低ノイズとする。
【解決手段】磁界発生用のコイル27と、コイルへの通電をPWM制御する制御部2を有するとともに、前記コイルへの通電によって回転駆動されるロータと、前記ロータの回転角を検知する回転角検知手段3と、前記ロータの回転速度を検出する回転速度検出手段4とを備えており、前記制御部2は前記回転角検知手段と前記回転速度検出手段からの出力信号を受けて、PWMキャリア周波数を決定するとともに外部からの能力可変信号に合わせてPWM制御のデューティを決定し、決定したPWMキャリア周波数とデューティで前記コイルへの電力供給を行う。
(もっと読む)
3相回転機の制御装置
【課題】 2組の巻線組を有する3相回転機の駆動を制御する制御装置において、相電流検出値のみを用いて、インバータまたは巻線組の故障を検出する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれ3相モータ80を構成する2組の巻線組801、802に、振幅が互いに同一で、位相が互いに30°ずれる交流電流を供給する。電流検出器701、702は、インバータ601、602から巻線組801、802に通電される相電流を検出する。故障判定手段751、752は、互いに他系統の3相電流検出値に基づいて、自系統の相電流推定値を算出し、電流検出値と比較する。これにより、ECU101は、電流検出器701、702からの情報である相電流検出値のみを用いて、インバータ601、602または巻線組801、802の故障を検出することができる。
(もっと読む)
電気モータ
【課題】電気モータの複数のコイルを適切に冷却する。
【解決手段】電気モータは、モータの磁場を発生するように配置された一つまたは複数のコイルセットを含む。電気モータは、電流制御のためにコイルのそれぞれのコイルサブセットに接続された複数の制御装置も含む。同様の構成が、発電機についても提案される。電気モータまたは発電機用のコイル取り付けシステムは、モータのコイルを巻き取り可能に受け入れる一つまたは複数のコイル歯と、複数のコイル歯を取り外し可能に受け入れる後部とを含む。それぞれのモータで独立して駆動される複数の車輪を有する車両のトラクション制御システムおよび方法が提供される。各車輪が車両のサスペンションアームに取り付けられそれぞれのモータで独立して駆動される複数の車輪を有する車両のサスペンション制御システムおよび方法が提供される。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
電動パワーステアリング装置
【課題】インバータ装置を構成しているスイッチング素子に過電流が流れた場合でも、昇圧回路を構成するスイッチング素子を保護することができる電動パワーステアリング装置を提供すること。
【解決手段】インバータ装置に流れる少なくとも1相以上の電流値が所定値1(I0)以上になった場合(ステップ、S101:YES)が、所定時間T1以上経過(ステップ、S102:YES)し、かつ、出力電圧検出手段から検出した出力電圧が所定値2(V1)以下になった場合(ステップ、S103:YES)には、第1および第2のスイッチング素子のオン/オフ比を50%に制限する(ステップ、S104)。昇圧回路の第1、および第2のスイッチング素子のオン/オフ比を50%に制限するので、昇圧回路内に流れる電流の急激な増加を抑えることができる。
(もっと読む)
モータ制御装置
【課題】電流検出回路に故障が発生した場合でも、モータ制御の正常な動作を維持することができるモータ制御装置を提供する。
【解決手段】モータ制御装置は、インバータ回路1と、シャント抵抗Rsに流れるモータ電流を検出する第1電流検出回路10および第2電流検出回路20と、電流検出回路10、20の出力に基づいてモータ電流の検出値を算出するとともに、目標値のモータ電流を流すための指令値をPWM回路2へ出力する制御部3とを備える。第1電流検出回路10は正の第1ゲインを有し、第2電流検出回路20は第1ゲインを反転した負の第2ゲインを有する。制御部3は、第1電流検出回路10の出力に基づき算出した第1検出値と、第2電流検出回路20の出力に基づき算出した第2検出値とを用いて、電流検出回路の異常有無と、いずれの電流検出回路が異常であるかの判定を行い、正常な電流検出回路の検出値に基づいてモータ制御を行う。
(もっと読む)
DCブラシレスモータ
【課題】商用交流電源などのAC電源の直接入力が可能で、その商用電源の周波数に応じた速度で駆動が可能なAC入力のDCブラシレスモータを提供する。
【解決手段】本発明のAC入力のDCブラシレスモータは、駆動巻線と可動子とを少なくとも有するモータ部と、駆動巻線に駆動電力を供給するパワー素子と、駆動電力を制御するパワー制御部と、速度制御信号を発生する速度制御部と、商用交流電源が入力される端子部、および入力される商用交流電源の周波数を安定させる安定化部とを備え、パワー制御部は速度制御信号によりパワー素子の通電量を制御し、速度制御部は端子部に入力される商用交流電源の周波数に基づいて速度制御信号をパワー制御部に出力し、モータ部とパワー素子とパワー制御部と速度制御部とを少なくとも内蔵して、端子部への商用交流電源の接続によって商用電源周波数に応じた速度で駆動される。
(もっと読む)
DCブラシレスモータ
【課題】商用交流電源などのAC電源の直接入力が可能で、その商用電源の周波数に応じた速度で駆動が可能なAC入力のDCブラシレスモータを提供する。
【解決手段】本発明のAC入力のDCブラシレスモータは、駆動巻線と可動子とを少なくとも有するモータ部と、駆動巻線に駆動電力を供給するパワー素子と、駆動電力を制御するパワー制御部と、速度制御信号を発生する速度制御部と、商用交流電源が入力される端子部とを備え、パワー制御部は速度制御信号によりパワー素子の通電量を制御し、速度制御部は端子部に入力される商用交流電源の周波数に基づいて速度制御信号をパワー制御部に出力し、モータ部とパワー素子とパワー制御部と速度制御部とを少なくとも内蔵して、端子部への商用交流電源の接続によって商用電源周波数に応じた速度で駆動される。
(もっと読む)
モータ駆動回路、および、モータ装置
【課題】信号伝送の制約を回避しつつ、より適切に試験動作することが可能なモータ駆動回路を提供する。
【解決手段】モータ駆動回路は、前記モータを駆動する駆動電圧を前記モータに供給するドライバを、駆動制御信号により制御する駆動制御信号生成回路を備える。モータ駆動回路は、電源から前記ドライバに供給される電源電圧を検出し、前記電源電圧が予め設定された第1の閾値以上である場合には、前記駆動制御信号生成回路に通常動作を指示する通常動作モード信号を出力し、一方、前記電源電圧が前記第1の閾値未満である場合には、前記駆動制御信号生成回路に試験動作を指示する試験動作モード信号を出力するモード選択回路を備える。前記駆動制御信号生成回路は、前記通常動作モードに応じて、前記駆動制御信号により前記ドライバを制御して、前記モータを通常動作させ、一方、前記試験動作モード信号に応じて、前記駆動制御信号により前記ドライバを制御して、前記モータを試験動作させる。
(もっと読む)
スイッチング回路の制御装置
【課題】スイッチング回路の損失を低減させる。
【解決手段】所定のスイッチング周期において、ハイ側スイッチング素子のオンデューティとロー側スイッチング素子のオンデューティとを独立に設定可能なPWM演算部25を備え、PWM演算部25は、前回までの複数のスイッチング周期におけるオンデューティの積算値を算出する通電割合演算部25aを備える。PWM演算部25は、通電割合演算部25aによって算出されたオンデューティの積算値に基づいて、順方向電流が流れていないスイッチング素子のオンデューティを設定する。
(もっと読む)
モータ制御装置
【課題】電流オフセット値の急激な変化を抑制して、安定した操舵フィーリングを維持できるモータ制御装置を提供する。
【解決手段】モータ電流がゼロとみなされる状態で検出されたドリフト電流の検出電流値を電流オフセット値として設定し、当該電流オフセット値によりモータ電流の検出電流値を補償するモータ制御装置において、所定の周期Tごとにドリフト電流を検出し、検出したドリフト電流の検出電流値に基づいて、周期Tごとに目標オフセット値を設定する。電流オフセット値が目標オフセット値より小さい場合は、電流オフセット値に補正値Kを加算し、電流オフセット値が目標オフセット値より大きい場合は、電流オフセット値から補正値Kを減算することにより、電流オフセット値を周期Tごとに補正する。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
駆動装置、及び駆動方法
【課題】モータの負荷が大きい場合において誘起電圧に基づいてモータを駆動させる。
【解決手段】駆動装置は、モータのコイルに通電するインバータ回路と、各コイルに生じる誘起電圧と等価中性点電位との比較結果を示すパルス信号を生成する誘起電圧インターフェース回路と、コイルに流す電流の向きを示す複数の通電パターンを用いて通電を行い、所定の電流値に達するまでの通電時間に基づいてロータが停止している位置を検出する停止磁極位置検出部と、停止磁極位置検出が検出したロータの位置に基づいて選択した通電パターンで通電を行いロータにトルクを加えた後に、誘起電圧インターフェース回路が出力するパルス信号のレベルに基づいてロータにトルクを加える通電パターンを選択し、選択した通電パターンで通電をインバータ回路に行わせる起動通電を行った後に誘起電圧に基づいた制御を行う通電制御部とを備える。
(もっと読む)
ブラシレスDCモータのセンサレス制御装置
【課題】 強制転流モードからセンサレス制御モードへの移行がスムーズに行われるブラシレスDCモータのセンサレス制御装置を提供する。
【解決手段】 指令回転数=初期回転数として(S2)、強制転流モード(S3)を開始する。強制転流モード(S3)は、所定上昇幅で回転数を増加して(S5)、設定回転数に達するまで(S4)行う。そして、回転数が設定回転数に到達し(S4)かつロータ位置が検出可能となったとき(S6)に、センサレス制御モード(S7)に移行する。
(もっと読む)
単相ブラシレスモータの駆動回路
【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 単相ブラシレスモータの駆動コイルに第1および第2駆動電流をいずれも供給しない非通電期間を挟んで、駆動コイルに第1駆動電流と第2駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、駆動信号に応じて駆動コイルに第1または第2駆動電流を供給する出力回路と、非通電期間に、駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、駆動信号生成回路は、出力回路が駆動コイルに第1または第2駆動電流を供給する通電期間の開始から、ゼロクロス検出回路がゼロクロスを検出するまでの駆動周期に基づいて、次の通電期間の長さを決定し、ゼロクロス検出回路は、非通電期間の開始から所定時間経過後にゼロクロスの検出を開始する。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
41 - 60 / 754
[ Back to top ]