
Fターム[5H572BB06]の内容
Fターム[5H572BB06]に分類される特許
1 - 20 / 47
サーボドライブシステム
【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
モータ制御装置

【課題】応答性がよく、安定したタンデム制御によるモータ制御を行なうことができるモータ制御装置を提供する。
【解決手段】マスタ軸モータと少なくとも一つのスレーブ軸モータとを用いて、一つの軸を駆動するタンデム方式のモータ制御装置であって、モータ毎に位置制御部1と速度制御部2と電流制御部3とを具備し、さらにスレーブ軸にはマスタ軸のトルク指令値Tm*とスレーブ軸のトルク指令値とからスレーブ軸の調停トルク指令値Ts1*を算出するトルク調停部5と、スレーブ軸には上位制御装置からの指令の反転を検出する指令反転検出部23と、を備え、指令反転検出部23は、上位制御装置からの指令の反転を検出した場合、指令反転直前の調停トルク指令値Ts1*をスレーブ軸の速度制御部2の積分成分に設定することにより達成される。
(もっと読む)
制御装置及び洗濯機
【課題】所定時間内に一の制御対象への制御指令を生成した後に、他の制御対象への制御指令を生成し、複数の制御対象を並列制御して、各制御対象のプログラムタスクを確実に処理する制御装置及び該制御装置を有する洗濯機を提供する。
【解決手段】タスク1は処理の開始時点から所定期間t1の間、MPUを獲得し、処理を完了する。またタスク1の処理の開始時点からT/2経過した時点で、タスク2の割込が発生し、タスク2は、割込時点から所定期間t2の間、MPUを獲得し、処理を完了する。MPUは、三角波Q1、Q2が極小値時点に位置する毎に、タスク1及び2の処理を開始する。三角波Q1と三角波Q2との位相は180度相違している。
(もっと読む)
回転電機、回転電機駆動システム及び制御方法
【課題】
本発明は、大トルクであるとともに、高加速度を実現するためにモータ自体の回転子イナーシャが小さいことが求められる大容量サーボモータにおいて、決められた回転子イナーシャを実現するための固定子形状が定まった制約のもとでも、最もトルク応答の時定数が小さくなる回転電機の駆動制御を実現することを目的とする。
【解決手段】
複数巻線形の回転電機において、各巻線を電気時定数が小さいクラスの巻線群と、電気時定数が大きいクラスの巻線群とにより構成し、トルク指令値、またはトルク指令値の変化信号を、電気時定数が小さいクラスの巻線群に優先的に分配して、各駆動制御回路に与える指令波形が異なる状態で運転することを特徴とする。
(もっと読む)
制御装置
【課題】複数の制御対象を制御するための処理の増加に対して柔軟に対応可能な制御装置を提供すること。
【解決手段】 複数の制御対象を制御する制御装置は、複数の制御対象の入出力電力に応じて、複数の制御対象を制御するための各処理の優先度を決定する優先度決定部と、単位時間中に行われると推定される複数の制御対象の各処理に要する合計時間の総和に応じて、複数の制御対象の少なくともいずれか1つの処理を省略するか否かを決定する処理省略決定部と、処理省略決定部によって処理を省略すると決定された場合、優先度決定部が決定した優先度に基づいて、複数の制御対象の内、どの制御対象の処理を省略するかを決定する省略処理決定部とを備える。
(もっと読む)
遠心分離装置及びその運転方法
【課題】遠心分離装置において通常運転時に停電が発生することに起因して生じる課題を解決する
【解決手段】遠心力の作用により被処理液を固形物と分離液とに分離する回転ボウルと、回転ボウル内に配置され、回転ボウルと相対的な差速をもって回転されるコンベアと、回転ボウルに連結された主駆動モータと、コンベアに連結されたバック駆動モータと、電源と主駆動モータとの間に電気的に接続される主駆動側インバータ装置と、電源とバック駆動モータとの間に電気的に接続されるバック駆動側インバータ装置と、を備えた遠心分離装置の運転方法であって、停電が発生すると、慣性力で回転する回転ボウル及びコンベアによって主駆動モータ及びバック駆動モータで生成される回生電力を、バック駆動側及び/又は主駆動側インバータ装置の制御電源及び動力電源に給電して回転ボウルとコンベアとが相対的な差速をもって回転する状態を維持しながら減速させるようにする。
(もっと読む)
サーボ制御方法及びサーボ制御装置
【課題】被駆動物の位置により伝達関数が変化し、位相が急激に遅れて不安定になることにより、ゲインを上げることが困難となる現象を防ぐことが可能なサーボ制御系を提供する。
【解決手段】本発明の1実施例に係る方法は、一つの被駆動物を複数のモータで駆動する送り駆動機構に適用されるサーボ制御方法であって、各モータの速度フィードバックを混合した信号を用いて前記被駆動物の速度制御を行い、前記速度制御により得られたトルク指令を全てのモータの駆動に使用する。
(もっと読む)
サーボ制御装置およびモーションコントロールシステム
【課題】送受信の配置の衝突が繰り返される間、モーションコントロールシステム全体の初期化が遅延する。
【解決手段】第一の通信手段106はMDI結線、第二の通信手段107はMDI−X結線とすることで、通信ケーブル4としてストレートケーブルを選択した場合、主電源を入れ、夫々のサーボ制御装置1の電源が同時に入るとき、夫々のサーボ制御装置1同士の接続において、送受信ペアの衝突が発生しないようにすることが可能となる。
(もっと読む)
電動機駆動装置の制御装置
【課題】電圧制御部による内部処理に関する演算周期が最適化され、交流電動機を制御する際の処理負荷の低減が図られた制御装置を提供する。
【解決手段】直流電圧を交流電圧に変換して交流電動機に供給する直流交流変換部を備えた電動機駆動装置を、ベクトル制御法により制御する制御装置。交流電動機を駆動するための電圧指令値から直流交流変換部を制御するための制御信号を生成する電圧制御部として、電圧指令値と直流交流変換部に供給される実際の直流電圧とに基づいて、変調率と電圧指令位相とを導出する第一電圧制御部と、変調率と電圧指令位相と磁極位置とに基づいて、制御信号を生成する第二電圧制御部と、を備え、第一電圧制御部の演算周期(第二演算周期T2)が、第二電圧制御部の演算周期(第一演算周期T1)よりも長く設定されている。
(もっと読む)
電動車両
【課題】インバータのオープン故障時に発生し得る二次故障を防止可能な電動車両を提供する。
【解決手段】モータジェネレータMG1は、エンジン4の動力を用いて発電機として動作可能であり、モータジェネレータMG2は、車両の駆動力を発生する。制御装置30は、インバータ16のいずれかのアームにおいてスイッチング素子が常時オフ状態となるオープン故障の発生を検知する。そして、オープン故障が検知されると、制御装置30は、蓄電装置Bの入出力の変動と逆位相のパワー変動をモータジェネレータMG1が発生するようにインバータ14を制御する。
(もっと読む)
複数のサーボモータの制御方法
【課題】要求性能の高いサーボモータ、要求性能の低いサーボモータ夫々に対応した制御処理を行なう。
【解決手段】各々異なる駆動対象を駆動する複数のサーボモータ16〜20を所定の制御周期T毎に制御する際に、要求性能が低い駆動対象(R軸、W軸)のサーボモータが、オフ又は不使用とされた場合には前記要求性能が低い駆動対象の制御処理を中止し、その空き時間を利用して、要求性能が高い駆動対象(X軸)のサーボモータの制御処理を実行する。
(もっと読む)
バックラッシュ除去制御装置
【課題】加工時にはバックラッシュやロストモーションの発生を防止し、送り時には可動部材を高速送りする。
【解決手段】加工時には、2つのモータ11,21のうちの一方が可動部材GLを移動させるためのトルクを発生すると共に両モータ11,21が逆回転方向のオフセットトルクを発生することにより、バックラッシュやロストモーションの発生を防止する。送り時には、2つのモータ11,21可動部材GLを同方向に移動させるトルクを発生することにより、可動部材GLを高速移動動作させることができる。
(もっと読む)
交流電動機の機械角推定方法及び機械角推定装置
【課題】回転子または可動子の位置として電気角を検出または推定して制御に用いる交流電動機の駆動システムにおいて、付加的な装置を用いることなく、回転子または可動子の機械角を推定する。
【解決手段】回転子同士が機械的に連結されていると共に極数が互いに異なる2台の交流電動機MA,MBと、これらの電動機MA,MBの回転子の位置を示す電気角を求める制御回路20A,20Bと、を備えた電動機駆動システムにおいて、制御回路20Aにより求めた電動機MAの回転子の電気角と制御回路20Bにより求めた電動機MBの回転子の電気角とが同一の機械角に対応する時に、当該機械角を両電動機MA,MBの回転子の機械角とする。
(もっと読む)
拡張されたダイナミックレンジに亘ってトルクを迅速に発生させるための、低イナーシャを有する装置
本発明は、トルク設定点に応じて出力部材(3)上にトルクを発生させるための装置に関し、装置は、出力部材が連結されるシャフト(2)を有する、第1動力の少なくとも一つのモーター(1)又は少なくとも一つの小モーターを含む第1モーターユニットと、結合手段(4)を介して出力部材に回転可能に連結されるシャフト(12)を有する、第1動力よりも高い第2動力の少なくとも一つのモーター(11)又は少なくとも一つの大モーターを含む第2モーターユニットと、サーボ制御手段(50)とを含み、サーボ制御手段(50)は、トルク設定点(Msp)に応じて、粘性結合手段が、トルク設定点に適合する粘性トルク(Mvisc)を提供するように第2モーターユニット(11)に動力を与え、且つ、これと並行して、第1モーターユニット(1)が、粘性トルクがトルク設定点の値に到達するまで、トルク設定点と粘性トルクとの間の付加トルクを生成するように第1モーターユニット(1)に動力を与えるべくプログラムされる。 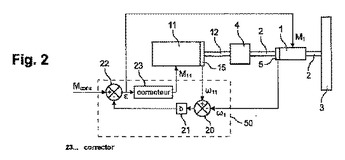 (もっと読む)
(もっと読む)
アクチュエータ
【課題】簡素な制御により、迅速でスムーズな加減速により高速度化を実現できる、直線案内軸受装置などに用いられると好適なアクチュエータを提供する。
【解決手段】第1駆動モータ109を目標速度に追従する速度制御とし,第2駆動モータ110は、第1駆動モータ109の実際の速度に追従するような速度制御を行うことにより,相互の動作が干渉しない形で2つの駆動モータ109,110をともにフィードバック制御することが可能となる。さらに第2駆動モータ110の速度制御において、第1駆動モータ109の指令値をフィードフォワードとして加えることで,制御による位相遅れを少なくしている。これにより制御の応答性,減衰性が向上するという利点がある。
(もっと読む)
画像形成装置
【課題】ピーク電流を抑制しつつ高速な起動が可能なモータ制御を実行する画像形成装置を提供する。
【解決手段】CPUは、画像形成装置の電源がオンされたかどうかを判断する(ステップS1)。CPUは、電源がオンされたと判断した場合には、次に、モータ間通信を開始する(ステップS2)。そして、次に、CPUは、モータ台数を確認する(ステップS3)。CPUは、モータ台数に応じて位相ずらし量を設定する(ステップS4)。具体的には、モータ台数(N)に応じて位相ずらし量を1/N周期に設定する。そして、次に位相ずらし量を設定する指示を出力する(ステップS5)。
(もっと読む)
多軸モータ制御システム
【課題】CPUの演算能力が高くない場合にも、多軸での高速、高加速でのモータ駆動を可能として、高い制御性能と低コストを両立させる。
【解決手段】1台のCPU42で複数のモータ10の制御演算を行なう多軸モータ制御システムにおいて、速度の立ち下がり以外の区間と立ち下がり区間を識別する速度区間識別手段(速度区間検出部42F、位置指令演算部50)と、電流指令補償分を設定する補償量設定手段(補償量演算部42G、補償量記憶部42J)と、速度の立ち下がり以外の区間では電流指令に電流指令補償分を加算し、速度の立ち下がり区間では電流指令に電流指令補償分を加算しない電流指令補償手段(スイッチ部42H、可変ゲインアンプ42K)と、を備える。
(もっと読む)
ルーパー設備
【課題】張力変動を抑えつつ各ストランド間の張力偏差を小さく抑えることが可能なルーパー設備7を提供する。
【解決手段】多ストランド式ルーパー設備7である。各移動式ロール11a〜11c毎に電動機10a〜10cを対応付ける。そして、ルーパー出側に位置する移動式ロール11cに対応する電動機10cをマスターとしてトルク制御する。その他の移動式ロール11a、11bを、スレーブとして、マスターの移動式ロール11aの位置に追従するように、速度制御する。
(もっと読む)
駆動力制御装置
【課題】小型の電気自動車に適した走行安定性の向上を図ることができる駆動力制御装置を提供する。
【解決手段】横加速度センサ41から横加速度52を入力し(S1)、横加速度52の作用方向から旋回方向を判別する(S2)。左旋回の場合(S3)、横加速度52が所定横加速度以上であり所定値71を越えているか否かを判断し(S4)、所定値71未満の場合、外輪側である右ホイールインモータ22の供給電流を低下し、右ホイールインモータ22から出力される駆動力を低下する(S5)。これにより、左ホイールインモータ21で駆動される左フロントタイヤ14と右ホイールインモータ22で駆動される右フロントタイヤ15とにおいて、左右駆動力差ΔFが発生し(S6)、この左右駆動力差ΔFにより電気自動車2に旋回復元モーメント(M)を発生させる(S7)。
(もっと読む)
テーブルの制御方法およびその装置
【課題】ガントリータイプのテーブルにおいて、塗布速度への立ち上げが指令速度に対して遅れるために有効な塗布面を得るには塗布速度の高速化や除外距離(塗布を始めてから塗布膜厚の変動率が要求仕様に収まるまでの走行距離)の短縮も望まれており、速度制御への要求内容は厳しいものとなっているため、これに対応する。
【解決手段】クロスカップリング制御とゲイン切替制御の方式において、塗布速度到達時のオーバーシュートをおさえ、それ以降は速度ムラをおさえるために、中心速度コントローラのゲイン切替のみを行っていたが、左右偏差コントロールのゲインを加速時に大きくして加速終了後に小さくした。
(もっと読む)
1 - 20 / 47
[ Back to top ]