
Fターム[5H680BB01]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 種類、型式 (3,145) | 超音波モータ (1,391)
Fターム[5H680BB01]の下位に属するFターム
Fターム[5H680BB01]に分類される特許
41 - 60 / 275
エネルギー効率の良い分離構造を有する多自由度の圧電マイクロアクチュエータ
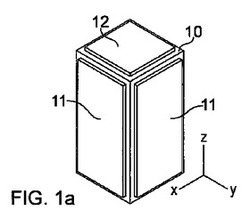
約1mm以下の大きさで製作できる多自由度圧電アクチュエータ。その多自由度圧電アクチュエータは、3次元空間の3本の基本軸それぞれの周りでまたはそれぞれの軸の方向に、回転素子または摺動素子の動きを発生させることができる。多自由度圧電アクチュエータは、1つまたは複数の側面と、第1の端面と、第2の端面とを有する圧電素子(10)を備えることができる。ここで、少なくとも1つまたは複数の側面は、独立した側面電極(11)を複数備えており、第1の端面または第2の端面のうちの少なくとも一方は、端面電極(12)を備えている。圧電アクチュエータに使用されるトランスデューサ素子(30,40)および分離構造(5)についても記載されている。 (もっと読む)
超音波モータ用振動子摩擦接触部材および超音波モータ用振動子

【課題】振動子先端の摩擦接触部の形状により初期動作が持続して安定な速度、推力、安定な共振周波数が保たれ、安定した動作特性が長期にわたって得られる超音波モータ用振動子を提供する。
【解決手段】被駆動体2を摩擦接触で駆動する超音波モータ用振動子1の摩擦接触部材において、振動子先端の接触子を前記被駆動体との摩擦接触で摩耗する際に軸方向に沿って横断面の外形と横断面積が同一の状態を保つピン形部材で構成したことを特徴とする超音波モータ用振動子摩擦接触部材、およびその超音波モータ用振動子摩擦接触部材を備えた超音波モータ用振動子。
(もっと読む)
電気機械モータに対する法線力の付与
電気機械モータ組立体(1)は、ステータ(30)と、移動対象体(10)と、ステータ支持部(35)とを備える。ステータ(30)は、常に電気機械アクチュエータ(20)のうちの少なくとも1つを確実に対象体(10)と非スライド方式で接触させるステップの反復により対象体(10)を移動させるように構成された複数の電気機械アクチュエータ(20)を有する。組立体は、さらに、少なくとも1つのバネ構成部(42)により、ステータとステータ支持部との間に法線力(N)を加える加力構成部(40)を備える。バネ構成部(42)は、対象体(10)の表面(5)に対する法線方向(Z)に、法線力(N)と、対象体(10)の表面(5)の平均高さ不確定性との比の5%未満となる低いバネ定数を有する。加力構成部(40)は、さらに、主運動方向(X)に平行で、かつ、対象体(10)の表面(5)に対して並置された状態で、ステータ(30)とステータ支持部(35)との間に取り付けられた横固定板(46)を備える。 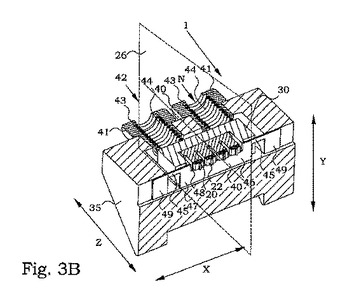 (もっと読む)
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、及び、電子カメラ
【課題】振動アクチュエータを駆動する際に生じるノイズを低減する振動アクチュエータ駆動装置を提供する。
【解決手段】振動アクチュエータ駆動装置(14)は、周波数を有する駆動信号を振動アクチュエータに出力する出力部(144)と、前記振動アクチュエータ(12)の駆動を指示する信号が入力されると、予め定められた第1振幅を有する前記駆動信号を前記振動アクチュエータ(12)に出力した後に、前記駆動信号の振幅を前記第1振幅から当該第1振幅より大きい予め定められた第2振幅まで増加させつつ当該駆動信号を前記振動アクチュエータ(12)に出力する第1動作を前記出力部(144)に行わせる制御部(141)を備える。
(もっと読む)
アクチュエータ
本発明は、プレート型のアクチュエータに関し、アクチュエータにおいて定常音波を励起させるための少なくとも2つの発生器を備える。アクチュエータは、少なくとも2つの主面と主面に対して垂直に延在する対称面Sとを含む。発生器は、対称面Sに対して対称に配置され、アクチュエータの実質的に平坦な第一の側面領域に配置される。アクチュエータはさらに、被駆動要素に対して摩擦接触するように設けられた少なくとも一つの摩擦要素および/または少なくとも一つの摩擦層を有する。第一の側面領域は、アクチュエータにおいて励起された定常音波の波長に実質的に対応する長さLを有する。本発明によれば、アクチュエータの第二の側面領域の長さBは、アクチュエータにおいて励起された定常音波の波長より大きく、励起された定常音波の波長の半分の倍数に等しくない。  (もっと読む)
(もっと読む)
振動アクチュエータの制御装置
【課題】 従来の振動アクチュエータの制御装置では、調整時において、振動アクチュエータを低速で回転させた場合、回転ムラや負荷トルクのムラにより振動アクチュエータが途中で止まってしまい、振動アクチュエータの調整が行えないという問題があった。
【解決手段】 フィードバック制御手段により、予め設定された目標回転数に対応すると推定される周波数fの駆動信号Sa、Sbによって超音波モータ9が駆動され、速度検出器10で計測される回転数Nを目標回転数にするフィードバック制御が行われる。また、特性決定手段により、目標回転数が駆動信号Sa、Sbの複数の周波数帯域で設定されて、複数の目標回転数付近における超音波モータ9の駆動周波数fと回転数Nとの相関特性が計測されて、実際の相関特性が決定される。このため、調整時において、超音波モータ9がほぼ一定の回転数Nで回転する。
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、及び、光学装置
【課題】振動アクチュエータの製造ばらつきによる消費電力の増加を抑制する振動アクチュエータ駆動装置を提供する。
【解決手段】アクチュエータ駆動装置(10)は、所定の周波数を有する発振信号を生成する発振部(11)と、前記発振部が生成した前記発振信号を増幅し、該増幅した信号を駆動信号として前記振動アクチュエータに印加する増幅部(13)と、前記振動アクチュエータに印加された前記駆動信号の電圧を検出する電圧検出部(14)と、前記電圧検出部により検出された電圧が予め定められた電圧になる増幅率を算出して前記増幅部の増幅率を算出した増幅率に変更する制御部(17)とを具備する。
(もっと読む)
超音波モータ
【課題】駆動時における異音の発生を低減させた超音波モータを提供すること。
【解決手段】被駆動体5に当接する駆動子10を備える超音波振動子4に2相の駆動信号を印加して縦振動と屈曲振動とを同時に発生させることで、前記超音波振動子4に楕円振動を発生させ、該楕円振動から駆動力を得て前記駆動子10により前記被駆動体5を摩擦駆動する超音波モータを、次のように構成する。すなわち、制御CPU22は、前記2相の駆動信号の位相差である駆動位相差を切り替えて駆動する際に、駆動位相差の切り替えの周期を変化させるよう駆動位相差の切り替えタイミングを制御する。
(もっと読む)
取り付け可能な腕部を有するスマートアクチュエータ装置及びエネルギー取得装置
本発明のスマート材料アクチュエータ装置は、固定支持部材、少なくとも1つの取り付け可能なアクチュエータ腕部及び前記取り付け可能な腕部と可動維持部材に接続される少なくとも1つの協働部材を含む。圧電スタックが前記固定支持部材の第1の取り付け表面及び前記可動支持部材の第2の取り付け表面の間に固着される。前記固定支持部材が実質的に剛性であり、かつ前記第1の取り付け表面と第2の取り付け表面は実質的に平行であり、その間に前記圧電スタックが固着されており、前記圧電スタックに適切な電圧を付加すると、前記圧電スタックは実質的に角度をもって動くことなく伸びる。この伸びは、前記第2の取り付け表面を前記第1の取り付け表面から離すように作用し、それにより前記機械的ウェブの前記協働部材を曲げ、それにより前記取り付け可能なアクチュエータ腕部を動かす。前記ウェブ及び前記取り付け可能な腕部の構成により、前記腕部のアクチュエータ端部が前記圧電スタックの前記伸びよりも大きい距離を移動することとなる。このようにして、前記スタックの伸びが前記機械的増幅装置により実質的に増幅されることとなる。このタイプのアクチュエータ装置は、電気エネルギーから機械的動きを生成するためんと、機械的動きから電気エネルギーを取得するために使用され得る。またかかる動きの量を検出するために使用され得る。機械的動きから電気を生成する方法、かかるアクチュエータ装置を用いて振動を生成する方法に加えて、共鳴周波数を調節し、共鳴操作によりエネルギーの取得の効率を上げる方法に加えて、外部構造との接続のための腕部の設計及び方法のいくつかが開示されている。  (もっと読む)
(もっと読む)
超音波モーターユニット
【課題】超音波モーターを配線基板等に対して固定する際に、圧電素子に電気信号を印加することによる体積変化等を妨げず、且つ小型化及び省スペース化を図ることができる超音波モーターユニットを提供することを目的とする。
【解決手段】被振動子である管状部材と当該管状部材の外周面に当接して配置される複数個の振動子である圧電素子とからなるステーターと、管状部材と螺合結合可能なローターとを備える超音波モーターと、超音波モーターを支持するホルダーとからなる超音波モーターユニットにおいて、ホルダーを構成するホルダー部材は、導電材料からなり、且つバネ性を有してステーターを保持する固定端と超音波モーターを固定すると共に電気信号を入力する接続端とが一体的に形成され、固定端をステーターに備わる圧電素子と直接接続することにより、ホルダー部材を通じて圧電素子に電気信号を伝えることを特徴とする超音波モーターユニットを採用した。
(もっと読む)
小型スマート材料アクチュエータ及びエネルギー獲得装置
全長10mm未満のミクロスケールのスマート材料のアクチュエータであり、多層圧電スタックが、固定支持部材、1以上のアクチュエータ腕部に接続される協働リンクと接続される可動支持部材を含む機械的増幅装置内に設けられ、適切な電流が前記圧電スタックに付加されるとその結果生じる伸びが前記可動支持部材を通じて伝達され、それにより前記アクチュエータ腕部に動きを生じさせる。かかるアクチュエータを用いて動きから電気を発生させる公報がまた開示され、前記アクチュエータ腕部が機械的動き源に接続され、前記圧電スタックが電気的負荷に接続され、それにより前記機械的動きが前記圧電スタックに電荷を発生させ、その電荷が前記負荷に放出される。  (もっと読む)
(もっと読む)
振動アクチュエータ、レンズ鏡筒、カメラ及び振動アクチュエータの製造方法
【課題】圧電体の電極に対する改良された電気配線を備える振動アクチュエータを提供する。
【解決手段】本発明の振動アクチュエータ10は、圧電体13と、前記圧電体13の励振により振動される第1部材12と、前記第1部材12の前記振動により前記第1部材12に対して相対移動される相対移動部材15と、を備え、前記第1部材12における前記圧電体13との接触面、及び前記第1部材12の外周面における前記接触面以外の部分の少なくとも一部が不導体であって、前記第1部材12の接触面と前記圧電体13との間が導電性接着剤13bで接着され、前記第1部材12の前記不導体上に、前記導電性接着剤13bから延びる導通部12fが形成されていること、を特徴とする。
(もっと読む)
ドーム状の線形圧電モーター
本発明は、ドーム状の線形圧電モーターに関するもので、ドーム状の圧電セラミックを通して向上した変位を提供する線形圧電モーターを提供するにおいて、ドーム状の線形圧電モーター(DSPLM)は、両面に互いに異なる電極が印加されるように処理されたドーム状の圧電セラミックアクチュエーターと、前記ドーム状の上部頂点に垂直に固定される棒状の振動軸と、円筒状に前記振動軸に嵌められ、前記振動軸に沿って線形運動をするように構成される移動体と、前記ドーム状の下側エッジ部に固定されるセラミック拘束体とを含むことによって、平面状の圧電セラミックによる厚さ方向に対する振動変位より振動軸方向に対する振動変位をより向上させる発明に関するものである。 (もっと読む)
振動アクチュエータ、振動アクチュエータの相対運動部材の製造方法、振動アクチュエータを備えたレンズ鏡筒及びカメラ
【課題】良好な駆動性能を有する振動アクチュエータ、振動アクチュエータの相対運動部材の製造方法、振動アクチュエータを備えたレンズ鏡筒及びカメラを提供する。
【解決手段】本発明の振動アクチュエータ10は、圧電体13が接合され、前記圧電体13の励振により駆動面12dに振動波を生じる振動体11と、前記振動体11の前記駆動面12dに加圧接触され、前記振動波によって駆動される相対運動部材15と、を備える振動アクチュエータ10において、前記相対運動部材15は結晶性樹脂で形成され、前記駆動面12d側の第1の面15aと、前記駆動面12d側とは反対側の第2の面15bとが、機械加工されていること、を特徴とする。
(もっと読む)
振動型駆動装置
【課題】摩擦係合部材を樹脂で形成しながら起動電圧が高くならない振動型駆動装置を提供する。
【解決手段】電気機械変換素子3によって往復変位させられる駆動部材4と、駆動部材4に摩擦係合する摩擦係合部材5とを有し、摩擦係合部材5は、駆動部材4を挟み込む受け部材6と押さえ部材7とを含む振動型駆動装置1において、受け部材6を樹脂で成形し、受け部材6の駆動部材4に当接する摺動面の表面粗さを中心線平均粗さ0.9μm以上とする。
(もっと読む)
超音波モータ駆動装置
【課題】被駆動体に搭載物を追加しても超音波振動子にかかる押圧力を一定に保つことを可能とし、これにより動作が安定した超音波モータ駆動装置を提供する。
【解決手段】縦振動と屈曲振動を同時に励振して楕円振動を発生させ、楕円振動を駆動力とする、ベース部材上に設けられた超音波振動子を有する超音波モータ駆動装置であって、被駆動体と、被駆動体と対向するように超音波振動子に設けられ、被駆動体と接触し被駆動体を変位平面内の任意の方向に駆動させる駆動子と、超音波振動子と被駆動体との間に作用する押圧力を検出する押圧力検出部と、押圧力検出部による検出結果に基づき押圧力を所定の押圧力に調節する押圧力調整部と、を備え、ベース部材と被駆動体がシャフトにより機械的に連結されている。
(もっと読む)
振動アクチュエータ、レンズユニットおよび撮像装置
【課題】振動アクチュエータの効率を向上させる。
【解決手段】ロータと、ロータの回転軸の方向に、ロータに接して配されたステータと、回転軸の方向についてロータとの間でステータを挟む位置に配され、ステータに対してロータの回転軸周りに遷移する振動を付与する電気機械変換部と、回転軸の方向についてステータとの間で電気機械変換部を挟む位置に配された狭持部材と、ロータ、ステータおよび電気機械変換部に挿通され、狭持部材に結合された軸部材と、回転軸の径方向について軸部材とステータとの間に挟まれており、回転軸の方向に沿ってロータ側に延伸する振動体とを備える。
(もっと読む)
駆動装置
【課題】係合部材の所定位置への移動制御を可能にする。
【解決手段】駆動電圧が印加されることにより伸縮する圧電素子26と、該圧電素子26により駆動される駆動部材28と、該駆動部材28に所定の摩擦力で係合された係合部材30と、前記圧電素子26を矩形波からなる駆動電圧により駆動する駆動回路14と、該駆動回路14の動作を制御する制御部22とを備え、前記圧電素子26の伸張と縮小とを異なる速度で行わせることで前記駆動部材28と係合部材30とを相対移動させる圧電アクチュエータ10において、前記係合部材30の位置を検出する部材センサ16をさらに備え、前記制御部22は、前記部材センサ16からの信号に基づいて所定のデューティ比の駆動パルスを出力し、該駆動パルスに応答して、前記駆動回路14が前記矩形波を発生することで、前記圧電素子26を駆動する。
【選択図】図1  (もっと読む)
(もっと読む)
振動型アクチュエータ
【課題】 強固且つ高い精度で取り付けることで、安定的に支持することのできる振動型アクチュエータを提供すること。
【解決手段】 アクチュエータ本体1を、一組のホルダ11とカバー12とからなる支持部材10の内部に接着剤21,22を用いて中空状態で保持する。ホルダ11には、移動体2の移動方向(X方向)と直交するY方向に取付部11D及び延出部11E,掛止部11Fが一体形成されており、振動型アクチュエータはこの取付部11D及び掛止部11Fを用いて他の電子機器の筐体に固定される。取付け作業の際、移動体2と取付部11D及び掛止部11F等との干渉がなくなり、支持部材10を強固且つ高い精度で取り付けることが可能となり、アクチュエータ本体1を安定的に支持することができる。
(もっと読む)
アクチュエータおよび光学装置
【課題】簡単な構成で、2次元の位置決めができるアクチュエータを提供する。
【解決手段】アクチュエータ6は、印加された電圧に応じて機械的変位を生じる電気機械変換素子11と、電気機械変換素11子の機械的変位によって軸方向に変位させられるとともに傾斜させられる駆動軸12と、駆動軸12に摩擦係合する移動体13と、電気機械変換素子11に、移動体13が駆動軸12に対して滑り変位しない低い変化率で駆動軸12を所望の角度に傾斜させる直流駆動電圧と、移動体13が駆動軸12に対して滑り変位するように駆動軸12を軸方向に振動させる交流駆動電圧とを重畳して印加する駆動回路とを有する。
(もっと読む)
41 - 60 / 275
[ Back to top ]