
Fターム[5J062AA05]の内容
Fターム[5J062AA05]に分類される特許
81 - 100 / 122
周波数応答整合を使用した無線周波数ナビゲーション
無線ナビゲーションの方法は、多数の可能性のあるデバイス位置のそれぞれに対して周波数応答を予測する工程を含み得る。方法はまた、実際のデバイス位置において周波数応答を測定する工程も含み得る。方法は、測定周波数応答を予測周波数応答の1つと整合させて、推定デバイス位置を決定する工程であって、推定デバイス位置は、測定周波数応答に最も密接に整合する1つの予測周波数応答に関連付けられた可能性のあるデバイス位置に対応する、工程をさらに含み得る。  (もっと読む)
(もっと読む)
側位システムおよび無線通信装置

【課題】2つの基地局の設置だけで、移動局の相対位置を移動局自身で高精度に検出することの可能な、側位システムを提供する。
【解決手段】第1、第2の基地局200、300により側位の対象となる移動局100は、タイミング信号をトリガにして生成された超広帯域(UWB)方式による信号を基準拡散符号(PN0)で拡散して基準拡散信号とする基準拡散器104と、基準拡散信号を第1、第2の基地局に送信するアンテナ108と、第1の基地局および第2の基地局から信号を受信するアンテナ110と、受信した信号から第1の拡散符号との相関により第1の拡散信号を検出する第1の相関器114と、受信した信号から第2の拡散符号との相関により第2の拡散信号を検出する第2の相関器118と、第1の拡散信号および第2の拡散信号とタイミング信号との時間差を測定する時間差測定部120とを備える。
(もっと読む)
車載緊急通報装置及び車載緊急通報システム

【課題】緊急通報の開始トリガが発生した場合に、測位時刻が新しい位置情報をサービスセンターに送信し、適切な車両位置を通報する。
【解決手段】車載緊急通報装置2は、ナビゲーションシステム3が起動中では、ナビゲーションシステム3から位置情報を取得すると同時に、GPS測位部8がGPS衛星から測位アシスト情報を受信して位置情報を取得する。例えばナビゲーションシステム3や通信線に不具合が発生してナビゲーションシステム3から位置情報を取得不可能になった場合であっても、GPS測位部8が取得した位置情報を継続して保存することができ、緊急通報の開始トリガが発生した場合に、測位時刻が新しい位置情報を送信することができる。
(もっと読む)
車両周辺の解析方法
車両周辺の解析方法は、車両周辺の物体に関するデータを収集する工程と、そのデータを解析して車両周辺の空きスペース領域を決定する工程と、空きスペース領域の少なくとも一部を示す1つ以上のシグネチャを作成する工程と、そして後の検索用にシグネチャを保存する工程とを含む。  (もっと読む)
(もっと読む)
車載用ナビゲーション装置及びその制御方法
【課題】GPS受信手段を二系統用いる簡明な手法で自車位置判定の精度を効果的に向上させるカーナビゲーションの技術を提供すること。
【解決手段】切替手段88は、2つのGPS受信機による測位精度が所定基準以上に良好で、かつ、第1の自車位置情報と第2の自車位置情報の位置同士が所定範囲内に近接し、かつ、この所定範囲内に道路情報(例えば道路リンク)が存在しない場合に、マップマッチングの結果に代えて、第1の自車位置情報と第2の自車位置情報の平均値(位置及び方位)を算出して自車位置として採用する(切替処理)。
(もっと読む)
ナビゲーション・システムおよびナビゲーション方法
【目的】高精度を達成するためにGPS測定結果に加えて車両走行状態を利用する「ナビゲーション・システムおよびナビゲーション方法」を提供する。
【構成】MEMS(超小型電子・機械式システム、Micro Electro Mechanical System)と呼ばれる安価で低精度の慣性センサーを使用する慣性航法システム(INS)とGPSを複合したナビゲーション・システムにおいて、(1)慣性センサーから得られる加速度と角速度を用いて予め複数の車両走行状態を定義し、(2)INSに搭載された慣性センサーから車両の各座標軸における加速度と角速度を受信し、(3)該加速度と角速度を評価することで車両の現在の走行状態を判別し、(4)判別された車両走行状態に応じた値を求め、該値を測定値としてINSとGPSを複合するカルマン・フィルタに送り、(5)車両走行状態を考慮してカルマン・フィルタ処理を行って車両の位置、速度及び姿勢の最適な推定値を得る。
(もっと読む)
GNSS信号の捕捉のためのシステム及び/又は方法
【解決手段】 本明細書に開示される主題は、衛星航法システム中の宇宙ビーグル(SV)から受信される信号を捕捉するためのシステム及び方法に関する。一例では、第1のSVからの信号を捕捉する処理した情報は、第2のSVからの信号の捕捉に使用されることができる。 (もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マルチパス波の影響を低減するとともに、各送信局の配置の偏りによる測位計算の精度の低下を低減し、従来技術に比較して高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マスク処理部23と、位置及び速度算出器22と、マッチング部35とを備える。マスク処理部23は、受信無線信号に基づいて、ナビゲーション装置10の進行方向に対する各GPS衛星の相対方位と、各GPS衛星の仰角とを算出し、算出された相対方位及び仰角に基づいて当該各GPS衛星を測位算出に使用しないようにマスクする。位置及び速度算出器22は、マスクされない各GPS衛星から受信した無線信号に基づいて自車位置を算出する。マッチング部35は、所定の地図データと、速度ベクトル算出器33により算出された速度ベクトルと、位置及び速度算出器22により算出された自車位置とに基づいて現在位置を特定する。
(もっと読む)
無線通信端末
【課題】本発明は、混信の可能性が低く、小型化・省電力化が可能な、自身の位置座標を特定することができる無線通信端末を提供することを目的とする。
【解決手段】アンテナ指向性制御部2は、可変指向性アンテナ1の指向性パターンを、例えば、所定の方向に3°のビーム幅を持つ指向性パターンとし、復調部41およびMACヘッダ解析部42で続けてデータの復調・判定処理を行い、受信状態測定部43は、正常にデータ取得出来た場合、取得したデータからビーコン波中に設定されたアクセスポイントの位置座標を抽出し、アンテナ指向性制御部2に抽出したアクセスポイントの位置座標を通知する。アンテナ指向性制御部2は、設定した指向性パターンのビームの方向に、アクセスポイントの位置座標を関連付けて記憶する。これを全ての方向に対して繰り返し、通信可能なアクセスポイントの方向と位置座標を取得する。
(もっと読む)
ナビゲーション装置、位置検出方法
【課題】慣性航法による測位について精度よく誤差の評価が可能なナビゲーション装置を提供すること。
【解決手段】移動体の位置を検出するナビゲーション装置1において、移動体の挙動情報を検出する自律センサ12,13と、自律センサによる検出情報を累積して移動体の慣性測位位置を検出する慣性測位手段10aと、時刻tの、慣性測位位置の誤差分散、自律センサのセンサ誤差分散及び計算誤差を、移動体の移動モデルに基づく更新式に適用して、時刻t+1の前記誤差分散を漸化的に算出する誤差分散算出手段10bと、を有することを特徴とする。
(もっと読む)
WLAN測位装置の位置を推定するためにWLAN対応アクセス・ポイントから情報を収集するシステム及び方法
WLAN測位装置の位置を推定するためにWLAN対応アクセス・ポイントから情報を収集するシステム及び方法。この装置は、それ自体の位置を推定し、WLAN無線モジュールと、前記受信されたWLANから識別情報を抽出するための抽出ロジックと、WLANベースの測位システムと協力するロジックとを含む。その無線は受信専用装置であるか或いは限定された送信能力(例えば、プローブ要求だけ)を有するものであり得る。或る抽出ロジックは、前記装置以外のWLAN対応装置に向けられたWLAN信号から情報を抽出する。他の抽出ロジックは、複数の、類似するけれども同一ではないWLANパケットのヘッダを組み合わせるダイバーシティ及び組み合わせロジックを含む。或る実施態様はキャッシュを含む。他は、前記装置のドップラー周波数の推定を改善するために充分に長いWLANパケットについて複数の受信信号強度インジケータ(RSSI)値を測定する。更に他のものはWLAN APのアクティブ・スキャニング及びパッシブ・スキャニングのためのフェーズを含む。 (もっと読む)
移動装置及び移動装置の自己位置推定方法
【課題】自律移動ロボット等の移動装置において自己位置推定を行う際の推定精度を向上させる。
【解決手段】ロボット1は、カメラ部101によって作業環境内に存在する物体を撮像した画像データを入力し、レーザレンジファインダ107によって作業環境内に存在する物体との距離を計測して得たレンジデータを入力する。また、i)再投影誤差算出部103が、画像データから検出したランドマークの画像上での位置と、記憶部106に格納された地図情報に含まれる作業空間におけるランドマークの位置を前記画像データに再投影した位置との再投影誤差を算出し、ii)位置誤差算出部108が、レンジデータと地図情報に含まれる形状データとの位置合わせ誤差を算出する。さらに、最適化部109が、これら再投影誤差及び位置合わせ誤差を含む目的関数をロボット1の周囲環境に応じて決定し、決定した目的関数を最適化してロボット1の自己位置を算出する。
(もっと読む)
移動ロボットの位置推定方法及び装置
【課題】 信号発生装置によって発信された信号を正確に検出して移動ロボットの位置推定の正確度を高める方法及び装置を提供する。
【解決手段】 本発明は移動ロボットの位置推定方法及び装置に関するもので、本発明の一実施形態による移動ロボット位置推定方法は所定の信号発生装置から発信された第1信号及び第2信号を移動ロボットに具備された第1信号を受信するセンサと第2信号を受信する3個以上のセンサによって第1信号及び第2信号を受信する段階、第1信号から抽出された時間情報を使用して第2信号を受信する各センサまでの発信距離を計算する段階、及び発信距離から移動ロボットの位置を計算する段階を含み、第2信号は信号発生装置から2回以上発信され、第2信号を受信する各センサは最初受信された第2信号の測定結果によって、それ以降受信される第2信号の増幅の可否を計算する。
(もっと読む)
位置表示装置
【課題】使用者の利便性を向上することができる位置表示装置を提供する。
【解決手段】GPS簡易地図上位置表示装置1は、2つの基準点それぞれについて、緯度および経度を含む実座標と、画面上のX座標およびY座標を含む相対座標を取得し、位置情報テーブル22に格納する。また、GPS簡易地図上位置表示装置1は、実座標上の三角形と相対座標上の三角形との相似関係に基づき、任意の地点の実座標からその相対座標を算出する。さらに、GPS簡易地図上位置表示装置1は、算出された相対座標に基づき、外部から取り込んだ地図画像上に現在地を表示する。
(もっと読む)
情報処理装置及び通信システム及び移動体誘導方法及びプログラム
【課題】無人航空機を自律的に誘導・回収する装置を得る。
【解決手段】GPS衛星15からの測位信号は、GPSアンテナ6とGPSアンテナ7でほぼ同時に受信される。気球3上のGPS受信部10から得られる擬似距離データ及び搬送波位相データは、送信部12により送信され、機体1上の受信部11によって受信される。相対航法計算部13は、受信部11により受信された気球3における擬似距離データ及び搬送波位相データとGPS受信部9から得られる機体1における擬似距離データ及び搬送波位相データを併せて相対航法演算を行い、気球3に対する機体1の相対位置及び相対速度を算出する。相対位置及び相対速度のデータは、誘導制御計算部14に送られ、この誘導制御計算部14によってケーブル2へ機体1を衝突させるための誘導制御量算出が行われる。誘導制御計算部14によって誘導された機体1はケーブル2へ衝突することで減速し、回収される。
(もっと読む)
移動体制御システム及び移動体の可動部の絶対位置算出方法
【課題】移動体の可動部の絶対位置を精度よく算出することができる移動体制御システムを提供する。
【解決手段】 移動体と、送信時間情報を含んだ信号を送信する装置とを備えた移動体制御システムであり、移動体は、本体と、可動部と、可動部を駆動するアクチュエータと、本体に取付けられ、信号を受信する信号受信部と、信号から信号受信部の絶対位置を算出する位置算出部と、アクチュエータの駆動量検出部と、位置算出部で算出された位置情報と検出された駆動量から可動部の絶対位置を算出する機能部を備えており、絶対位置算出部は、タイマと、検出される駆動量を検出時間と共に記憶する記憶部と、送信時間情報から信号が送信された時点の駆動量を記憶部の中から特定する特定部と、その駆動量と本体位置算出装置で算出した位置情報から、信号送信時の可動部の絶対位置を算出する算出部を備えている。
(もっと読む)
自律移動装置
【課題】実使用環境においてアレイ応答ベクトルをキャリブレーションすることにより、実使用環境での位置の検出精度を高めることができる自律移動装置を提供する。
【解決手段】電波発信器は絶対座標系における位置が既知であって電波を送信する。アンテナ21は3台以上の電波発信器からの電波を受信し、到来方位推定部23においてアレイ応答ベクトルに相当するパラメータをパラメータ格納部26に照合することにより電波の到来方位を推定する。測位処理部25は電波発信器の既知の位置と電波の到来方位とを用いて自己位置を求める。キャリブレーション動作では、アンテナ21が電波発信器に対して規定の位置関係である状態で、レーザレーダ5により実測した電波発信器の方位とアンテナ21から出力されているアレイ応答ベクトルに相当するパラメータとを対応付けてパラメータ格納部に書き込む。
(もっと読む)
編隊を組む宇宙船グループ内の一宇宙船用の、2周波数信号を解析することによる相対位置制御装置
編隊を組んで移動する宇宙船のグループの、1つの宇宙船(S1)用の制御装置(D)は、
i)宇宙船(S1)の面に設置され、選ばれた周波数ギャップにより隔てられた第一と第二の周波数を示す、第一と第二のRF信号を発信及び/又は受信可能な、3つのアンテナ(A1〜A3)から成る集合体と、
ii)アンテナにより受信され、そして他の宇宙船に由来する第一と第二の信号に基づき、第一の周波数及び周波数ギャップに対応する、アンテナ(A1〜A3)間の、第一と第二の経路長の差を決定する任務を負う第一の測定手段(M1)と、
iii)宇宙船(S1)により経験された回転の測定値を届ける任務を負う、第二の測定手段(M2)と、そして
iv)
a)第一と第二の初期経路長の差に基づき、受信した信号の伝送方向を粗く推算し、
b)前記宇宙船に結び付けられた座標系の選ばれた軸が、粗い伝送方向に対して揃えられるように、宇宙船(S1)の位置調整を指令し、
c)選ばれた軸を中心とした宇宙船(S1)の回転駆動を指令し、
d)回転測定、及びこの回転により引き起こされる第一の経路長の差の変化測定に基づき、他の宇宙船(Si’)により発信された信号の伝送方向を正確に推算する任務を負う、処理手段(MT)とを備える。 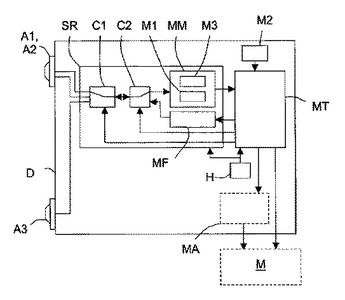 (もっと読む)
(もっと読む)
位置検出システム
【課題】 移動体ごとに面倒な校正登録作業などの初期設定を要することなく、可動式の走査器を要することもなく、高い精度と信頼性をもって移動体の位置を検出することが可能な位置検出システムを提供する。
【解決手段】 光学ビーコン♯2〜♯6が、発光順序が自身より2つ前の光学ビーコンから発せられる光および自身より1つ前の光学ビーコンから発せられる光のいずれかを受けることにより、発光する。
(もっと読む)
運転支援装置
【課題】運転経験のある同乗者に快適な乗車感覚を与え得る運転支援装置を提供する。
【解決手段】ナビゲーション装置では、運転者の運転傾向パラメータ取得処理(S209)により、運転者の運転傾向パラメータを取得し、同乗者の運転傾向パラメータ取得処理(S205)により、当該車両の同乗者の運転傾向パラメータを取得する。そして、運転傾向パラメータ差異処理(S211)により、運転者の運転傾向パラメータと同乗者の運転傾向パラメータとの差異を算出し、この算出された差異に関する情報を運転傾向パラメータ比較情報作成処理(S213)、運転傾向パラメータ比較情報出力処理(S215)により当該車両の運転状態としてディスプレィに出力し運転者に告知する。これにより、運転者の運転傾向パラメータと同乗者の運転傾向パラメータとの差異を、当該車両の運転状態としてディスプレィにより視覚的に当該運転者に知らせる。
(もっと読む)
81 - 100 / 122
[ Back to top ]