
Fターム[5J062AA05]の内容
Fターム[5J062AA05]に分類される特許
21 - 40 / 122
車両位置演算装置
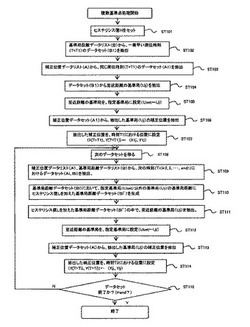
【課題】 一般に電子基準点から移動体までの距離が長くなるに従い測位性能が低下する。移動体が電子基準点をまたぐような広い範囲を計測対象として計測する場合であっても、測位結果の段差表示を少なくして、より精度の高い計測結果を表示する位置計測装置を提供する。
【解決手段】 予め定められたヒステリシス値を記憶する記憶部を備える。車両位置演算装置は、移動体の単独測位位置から複数の基準局の中で予め指定された指定基準局までの距離と、単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離との中から、最も近い距離にある基準局を抽出し、当該基準局を指定基準局に設定し、この指定基準局が有する補正情報とGPS衛星からの観測データとに基づき前記移動体の走行位置を算出する。
(もっと読む)
モータービークルに対する絶対位置を決定する方法
制約された領域における、擬似衛星による位置決定用の自律システム及び適用方法
補助されたモードにおいて動作する擬似衛星を用いた位置決定システム
信号捕捉補助データを取得するためのシステム及び方法

【課題】信号捕捉補助データを取得するためのシステム及び方法を提供する。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
(もっと読む)
ロケーションコンテキスト識別子を用いた移動局ナビゲーションのためのスケーラブルルーティング
本明細書で開示する例は、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとに関し得る。 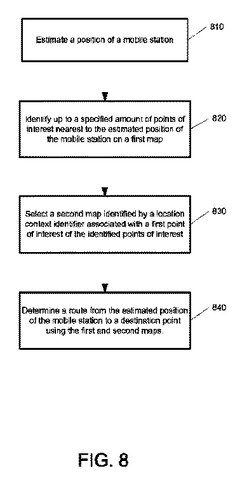 (もっと読む)
(もっと読む)
方位角推定装置、方法及びプログラム
【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
参照位置に対する位置の対応を決定するための装置および方法
参照位置(24)に対する位置(21)の対応を決定するための装置(30)であって、固定の無線送信機(22)の無線信号をその位置で受信できることを特徴とし、特定の無線送信機(22e)の識別子を決定するための、そして、第1の時刻(t1)にその特定の無線送信機の無線信号の信号特性を決定するための手段(32)であって、特定の無線送信機の識別子および無線信号の信号特性が、位置(21)のための測定パケット(MP)の少なくとも一部を示すことを特徴とする手段(32)と、位置(21)のための後処理された測定パケット(MP’)を得るために、測定パケット(MP)を後処理するための手段(36)であって、後処理するための手段は、第1の時刻(t1)が、特定の無線送信機(22e)の識別子が決定できた第2の時刻(t2)の前の最後の時間であって、そして、0.5秒以上の第1の時間(Δt)が、第1の時刻と第2の時刻の間にあり、その間特定の無線送信機(22e)の識別子を決定できない、第1の時刻(t1)から第1の時刻(t1)の後の第2の時刻(t2)までの間、特定の無線送信機(22e)の信号特性を少なくとも一時的に合成するために実行されることを特徴とする手段(36)と、対応を決定するために、参照位置(24)のための少なくとも1つの前に決定された参照測定パケット(RP)と、後処理された測定パケット(MP’)を比較するための手段(38)とを含むことを特徴とする装置(30)。 (もっと読む)
慣性測定ユニット(IMU)のための空間整合判断
本明細書で開示する主題は、慣性測定ユニット(IMU)の空間整合を判断するためのシステムおよび方法に関する。例として、第1のビークルベース方向を識別し、第1のビークルベース方向を地球ベース座標フレームに変換可能な第1の方向に関連付ける方法について説明する。第1の方向に少なくとも部分的に基づいてIMUの空間整合を判断する。 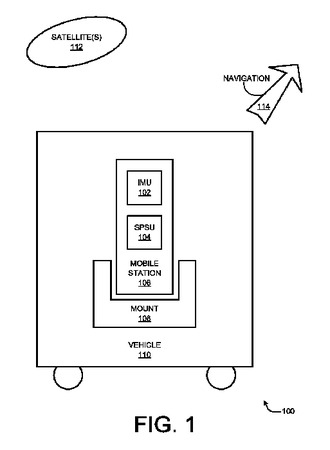 (もっと読む)
(もっと読む)
GPS軌跡を用いた付加的マップ生成、改良および拡張
GPS使用可能なナビゲーション装置によって記録される統計的に関連する量のプローブデータから、既存ネットワークを改良および拡張し、新しいネットワークを生成する方法。新しいプローブデータは既存のデジタルベクトルマップとマッチングされ、次にそのデータは、加重平均技術を使用して既存ネットワークへ結合される。新しい道路が検出されると、適切なジャンクション地点が既存ネットワーク要素から作られる。計算速度を向上し、データストレージ要求を低減するために、更新されたネットワークデータは単純化される。 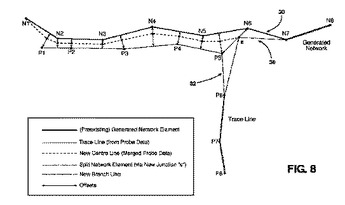 (もっと読む)
(もっと読む)
カメラ及びカメラシステム
【課題】画像データに付加されている位置情報を地図表示可能な端末装置に対して出力するカメラを提供する。
【解決手段】衛星からの信号をGPS受信機40により受信し撮影位置の情報を求め、画像データに付加し、画像表示部28にバーコードとして表示する。端末装置は、バーコードをカメラ機能により撮影し、変換された撮影位置情報に基づき、撮影位置周辺の地図データを画面に表示する。撮影位置情報は、電波、光信号により出力してもよい。
(もっと読む)
測位組み合わせ決定システム
【課題】目標とする測位精度を達成可能な走行環境に合わせた好適な測位組み合わせを、対象とする走行環境内での実機実験なしに選択可能とする、即ち、低コストで目標とする測位精度を達成可能な測位組み合わせを決定する。
【解決手段】ビークルで用いる複数測位手段の組み合わせを決定するシステム(1)であって、走行環境中の場所毎に決定される測位精度影響パラメータを記憶する手段(7)と、測位精度影響パラメータと複数測位手段の測位精度との関係を記憶する手段(9)と、測位精度影響パラメータと複数測位手段との対応情報を記憶する手段(6)と、走行環境における測位精度影響パラメータを取得する手段(8)と、その測位精度影響パラメータの対応情報を取得し、その対応情報に基づいて前記関係を参照して走行環境中の各位置における複数測位手段の測位精度を予測する手段(10)と、を備え、複数測位手段の組み合わせに対する測位精度を予測する。
(もっと読む)
測位システム及び制御方法
【課題】移動局のビーコン送信機12の測位において、各地点の電界強度を事前に実測すること及びビーコン受信機11−ビーコン送信機12間の距離を計算することを省略し、かつビーコン受信機11の配備数を少なくする。
【解決手段】ビーコン送信機12は、ID情報付きビーコンを周囲へ発射する。複数のビーコン受信機11は、測位空間19内にほぼ等密度で分布して配備され、受信したビーコンの電界強度を測定する。基地局15では、各ビーコン受信機11からのビーコン情報を受信し(S51)、ビーコン受信位置情報テーブルを参照して、ビーコン情報送信元のビーコン受信機11の位置を求める(S52)。さらに、ビーコン受信機11の各位置と同一IDのビーコンについての各ビーコン受信機11における電界強度の比とに基づきビーコン送信機12の現在位置を算出する(S53)。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
状態推定装置、方法、プログラム及びその記録媒体
【課題】未知の外乱がある環境で、対象物の位置等の状態(位置)の推定を高精度で行う。
【解決手段】状態パーティクルを用いて状態の推定を行うモンテカルロ・ローカリゼーション法を応用して、さらに変位量パーティクルを用いる。変位量パーティクルを用いることにより、対象物に与えられる外乱を考慮して対象物の変位量を推定することが可能となり、対象物の状態の推定を高精度に行うことができる。また、誘拐度Eを定義して、誘拐度Eが低い場合には、移動誤差を拡大することで状態パーティクルの存在範囲を広げる処理を行う。
(もっと読む)
受信機
【課題】受信装置を搭載した移動体が走行している道路情報を取得し、取得した道路の軌道と受信信号から得られる情報とを用いて測位し、取得する道路情報を限定した受信装置を提供することにある。
【解決手段】移動体に備え付けられる受信装置であって、衛星信号受信手段が衛星から衛星信号を受信し、信号処理手段が前記衛星信号から衛星位置情報と、誤差を含んだ前記衛星から前記受信装置までの距離である擬似距離情報とを算出し、道路情報取得手段が、限定された道路に関する3次元の道路情報を取得し、測位計算手段が前記道路情報に基づいた軌道、前記衛星位置情報、及び前記擬似距離情報に基づいて前記受信機の位置情報を算出する。
(もっと読む)
受信機の位置決定
開示される方法及びシステムを使用してユーザ装置の位置を決定する。ユーザ装置は、データ信号及び/又は搬送波信号を、周回している宇宙船から受信することができる。これらのデータ信号は、ユーザ装置の測位計算及び/又は追尾維持に使用することができる。開示される方法及びシステムは、ユーザ装置の時間バイアス及び周波数バイアスの問題を解決することができる。追尾維持を行なう場合、カルマンフィルタ状態推定器を拡張してユーザ装置の速度を推定することができる。  (もっと読む)
(もっと読む)
移動体端末の位置の推定を可能にする方法及び装置
第1のネットワークノード(180)と第2の無線ネットワークノード(120)と移動体端末(170)とにおける、移動体端末の位置の推定を可能にする方法および装置構成を提供する。あるステップで、第1のネットワークノード(180)が、移動体端末(170)の位置を推定する要求を受信する。別のステップで、第1のネットワークノード(180)が、第2の無線ネットワークノード(120)と2つの別の無線ネットワークノード(130,140)とを含む、無線ネットワークノードの第1の集合を決定する。次のステップで、第1のネットワークノード(180)が、第1の集合の無線ネットワークノード(120,130,140)から移動体端末(170)に送信する、位置決め信号を決定する。さらに次のステップでは、第1のネットワークノード(180)が、第1の集合の複数の無線ネットワークノード(120,130,140)それぞれに、それらに関連付けられた位置決め信号を移動体端末(170)に送信するよう指示する。 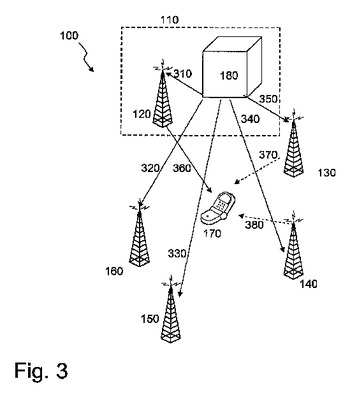 (もっと読む)
(もっと読む)
ローカル・マップ及び位置特有の注釈付きデータを提供するための人間援助型の技術
位置、ナビゲーション、及び/又は他の同様な情報及び/又はサービスが、携帯用電子デバイスのユーザの近くにある、人間可読情報を具備する1つ又は複数の可視環境特徴に対応するセンサリー入力情報に少なくとも部分的に基づいて、ユーザに提供されることを可能にするために様々な電子デバイスにおいてインプリメントされうる方法及び装置が提供される。 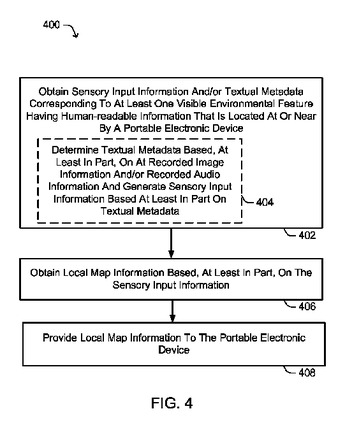 (もっと読む)
(もっと読む)
追従制御装置及び追従制御方法
【課題】追従性を向上した追従制御を課題とする。
【解決手段】車両1に対する移動目標としての電波発信源8の位置を推定し、推定した電波発信源8の位置に向かうように車両1の移動を制御する追従制御する技術である。上記車両1に対し平面視で互いに重ならない位置に複数の無線通信手段を設定して、上記電波発信源8からの電波の受信に基づき、各無線通信手段から電波発信源8までの各相対距離を取得する。取得した複数の相対距離から、車両1に対する電波発信源8の相対位置情報を推定する。そして、推定した相対位置情報に含まれる誤差が小さなる領域に、車両1の移動すべき方向を設定する。
(もっと読む)
21 - 40 / 122
[ Back to top ]