
Fターム[5J062AA05]の内容
Fターム[5J062AA05]に分類される特許
61 - 80 / 122
受信SPS信号に対するマルチパス効果の抑制

ここで開示する主題は、マルチパス信号の効果を抑制することに関連する。例として、少なくとも1つのバイナリオフセット搬送波(BOC)変調信号を含む信号が受信される。BOC変調信号は、複数のチップを備える擬似ランダム雑音シーケンスで変調されており、チップのそれぞれは、設定された間隔を有する。受信信号と、複数のチップの一部とを相関させて、パワー信号を提供して、パワー信号から、少なくとも受信信号中のマルチパス成分の部分を除去する。チップの一部は、設定された間隔よりも小さい。 (もっと読む)
飛翔体の測位装置

【課題】飛翔体が長時間にわたって加速を続けると、信号処理の基準周波数を発生する基準発信器において加速度による周波数ドリフトが生じるという問題があった。
【解決手段】飛翔体に搭載され且つ複数のGPS衛星からの信号を受信して自己の位置を測位する飛翔体の測位装置であって、基準周波数を発生する基準発信器12と、飛翔体に生じた加速度を計測する加速度計13と、加速度計13で計測した加速度に対応する基準発信器の周波数ドリフトを算出する第1補正手段14を備え、第1補正手段14により、算出した周波数ドリフトに基づいて実際に生じた基準発信器12の周波数ドリフトをキャンセルすることで、加速度により生じる基準発信器12の周波数ドリフトを解消した。
(もっと読む)
位置決定データを処理する方法
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、(i)1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、(ii)位置決定データを処理して、位置決定データから速度データを生成する工程と、(iii)ナビゲーション装置による使用に適切なマップデータの生成が起こった、ナビゲーションできる区域に速度データを関連付けるために、マップデータを速度データでアップデートする工程と、を含み、生成された速度データは、速度データを生成する位置決定データが発生したナビゲーションできる区域と関連付けられている、ことを特徴とする方法。 (もっと読む)
乗物の位置発見器
【課題】特定の位置を登録し、そこに戻るための、軽量かつ使用が簡単な装置を提供する。
【解決手段】ユーザーをある位置に案内するための位置発見装置であって:電波信号を使って現在位置を決定するよう構成されたシステム・ユニットと;表示領域およびボタンをもつユーザー・インターフェース・ユニットと;メモリ・ユニットと;乗物から該乗物のエンジンがオフであることを示す信号を受信するのに応答して前記メモリ・ユニットに第一の位置を記憶するよう構成されたプロセッサと;前記ボタンと対話するよう構成された計算ユニットとを含んでおり、前記計算ユニットは、ユーザーが第二のボタンを選択すると、前記システム・ユニットから第二の位置を取得し、前記第二の位置から前記第一の位置までの相対的な三次元的方向を計算し、前記相対的な三次元的方向は前記ユーザー・インターフェース・ユニットの表示領域にグラフィック表現される、装置。
(もっと読む)
境界標識による車両位置の補正
【解決手段】 この発明の代表的な一実施例にしたがって、車両のための位置は、行程ルート上の境界標識を検出し、この種の境界標識が識別されたときに実測された車両位置を補正することによって補正される。この境界標識は、連携する正確なGPS位置をもってその車両におけるデータベースに格納される。境界標識が到達されるときに、連携する正確なGPS位置が、車両において実測された位置と比較され、そこで、実測された位置が補正される。このように、位置認識を改善することができる。 (もっと読む)
位置検出システム及び位置検出方法
【課題】LCXを用いて、より簡単化された位置検出システムを提供する。
【解決手段】移動端末と、漏洩同軸ケーブルをアンテナとして無線通信を行う基地局と、を備えた位置検出システムであって、漏洩同軸ケーブルは、基地局から電気信号を入力される終端と、自ケーブル内部を伝播する電気信号が反射するように構成された他端と、を備え、移動端末は、漏洩同軸ケーブルから空間中に放射される直接波を受信する直接波受信手段と、漏洩同軸ケーブルの終端に反射した電気信号によって空間中に放射される反射波を受信する反射波受信手段と、直接波を受信した時間を示す情報と反射波を受信した時間を示す情報とを基地局に送信する時間情報送信手段と、を備え、基地局は、漏洩同軸ケーブルを介して電気信号を送信する信号送信手段と、時間情報を受信する時間情報受信手段と、時間情報に基づいて、移動端末の位置情報を算出する算出手段と、を備える。
(もっと読む)
携帯情報端末及び位置算出方法
【課題】自車両に新たな装置を搭載することなく、煩わしい操作を必要とせずに、自車両の駐車位置を把握することができ、また、ユーザが電車、バス、タクシー等を利用したときの乗車場所や降車場所を特定することが可能な携帯情報端末及び位置算出方法を提供する。
【解決手段】携帯情報端末は、ユーザの現在位置の絶対測位を行うGPS測位手段と、ユーザの歩数を計測する歩数計測手段と、時刻情報を取得する計時手段と、GPS測位手段により測位された位置情報と計時手段により取得された時刻情報とからユーザの移動速度を求め、移動速度と歩数計測手段により計測された歩数とに基づいて、ユーザが移動手段で走行中の状態にあるか歩行中の状態にあるかを識別するユーザ状態識別手段と、ユーザ状態識別手段による識別結果に基づいて、移動手段のパーキング位置及び移動手段の利用位置を算出する位置算出手段と、を有する。
(もっと読む)
衛星測位システムにおいて時間を決定するための方法および装置
【課題】衛星測位システムにおいて時間を決定するための方法および装置
【解決手段】一つの実施態様において、基準時間は、他のナビゲーション情報を決定するのに使用される。そのようなナビゲーション情報は、例えば、衛星測位システム(SPS)の受信機のローカル/位置を含む。一つの実施態様において、SPSの受信機と1組の一つ以上の衛星との間の相対速度は、SPSの受信機により示されるような時間と基準時間との間のオフセットを決定するために使用される。本発明の他の実施態様に関して、誤り統計が、基準時間を決定するために使用される。本発明の他の実施態様に従って、衛星の少なくとも位置を各々代表する二つの記録が比較され、時間を決定する。一つの実行において、SPSの受信機は移動であり、前記方法の一つ又は組み合わせにより、基地局に関連して時間と/又は他のナビゲーション情報を決定するように動作する。
(もっと読む)
非破壊試験計器用GPS対応型データロギング・システム
【課題】非破壊試験/非破壊検査計器用GPS対応型データロギング・システムを提供する。
【解決手段】位置データを得たGPSは、地理的スタンプ検査データ登録に使われ、より効果的で正確なデータ収集、構成、および解析を提供する。GPS対応型データロギング・システムは、計器が特定の検査区域に入ったことを検出するための方法および、その検査においてオペレータを支援するための位置特定作業を実行するための方法を同様に提供する。
(もっと読む)
監視応用のためのマップマッチング
【解決手段】
この発明の代表的な実施例にしたがって、目標物のための測定された位置とディジタルマップにおける情報との間のマップマッチング用の装置が示されている。これは、測定された位置に基づく、さらには、既定の誤差に基づくマップ上のマップ作成(cartography)エレメントの第1選択を実行するために使用されている計算ユニットを有する。さらに、この計算ユニットは、第1および第2補助(secondary)計算ユニットのための選択されたマップ作成エレメントを提供するように設計されている。さらに、補助計算ユニットからの値が、同一の測定のユニットにおいて変換される。
(もっと読む)
衛星位置決め基準システムおよび方法
【課題】衛星位置決め基準システムおよび方法
【解決手段】特定のSPS基準受信機が見える所のSPS衛星から受信された衛星位置推算用データ。複数のディジタル処理システムは、通信ネットワークを介して送信される衛星位置推算用データを受信するために通信ネットワークに結合される。ディジタル処理システムは、擬似距離をSPS移動受信機から受信し、SPS移動受信機の位置情報を擬似距離データの表示および通信ネットワークから受信された衛星位置推算用データから計算する。ディジタル処理システムは、通信ネットワークから擬似距離補正値も受信し、擬似距離データの表示を行うように擬似距離データを補正するためにこれらの補正値を使用する。本発明のこの例の一実施形態では、移動SPS受信機は通信するように結合される。
(もっと読む)
無線測位システム、移動体、そのプログラム
【課題】自律型ロボット等の自律的に移動できる移動体が、無線測位可能な環境下で、障害物の影響による誤差を少なくし、高精度に測位を行う。
【解決手段】ジャイロ23及び回転数検知用エンコーダ24によって移動方向、移動量を検知することで位置推定する。この位置推定は、移動量が多くなるに従って誤差が増大する。また、無線端末21によって各基地局との無線通信を行うことで無線測位を行う。そして、任意の各地点毎に、無線測位結果に基づいて無線測位可否データ、通信状態データを生成して、その位置座標に対応付けて記憶することを繰返すことでこれらデータを蓄積する。データ蓄積量が多くなるに従って、蓄積したデータを参照すれば、無線測位不能/可能なエリアが分かるようになるので、例えば目的地が無線測位不能エリア内にある場合には、無線測位不能エリア内での移動距離が少なくなるように移動制御する。
(もっと読む)
飛しょう体及び飛しょう体に搭載される慣性装置の調定方法
【課題】 飛しょう体が備える慣性装置の調定を短時間で行うこと可能にする。
【解決手段】 飛しょう体の胴体外周に複数設けられた赤外線センサからの出力情報に基づき前記飛しょう体のロール角を求めるロール角推定手段と、前記飛しょう体の位置座標とピッチ角とヨー角とを算出するGPSジャイロとを有する姿勢角初期推定手段と、前記姿勢角初期推定手段から入力した前記ロール角に基づき、前記GPSジャイロがGPS衛星からのGPS信号を受信可能な姿勢に制御する操舵装置制御手段と、前記飛しょう体に搭載した慣性装置から入力した慣性情報と、前記姿勢角初期推定部から入力した前記飛しょう体の位置座標とロール角とピッチ角とヨー角とに基づき、前記慣性装置を調定して前記飛しょう体の位置と姿勢角を算出する航法装置とを備えるようにした。
(もっと読む)
航法システム
【課題】計算能力の低い飛しょう体においても位置精度が非常に良いCPDGPS計算結果を利用できるようにするとともに、リアルタイムに飛しょう体の軌跡および到達ポイントを指令局側で正確に把握することが可能な航法システムを得る。
【解決手段】飛しょう体に搭載された航法装置1によるGPS受信機の観測データを、飛しょう体の監視および制御を行う指令局8へ送信し、指令局8側でGPS基準局11のデータと組み合わせてCPDGPS計算を実行する。その計算結果はテレメトリを通じて飛しょう体に再送信され、航法計算機によるGPSとINSの複合航法計算の自己位置計算の補正に使用する。また、この過程で、指令局8が飛しょう体の軌跡を精度良く把握することが可能となるため、ターゲット座標へ正確に誘導されたかどうかを把握することが可能になる。
(もっと読む)
ナビゲーション装置、測位時刻補正方法及び記録媒体
【課題】ユーザに分かり易い測位時刻を表示することのできるナビゲーション装置を提供することである。
【解決手段】衛星航法処理部63は、現在地位置情報を順次生成し、現在地位置エリア34に記憶する。その際、過去の現在地位置情報は、移動位置情報として移動位置エリア33に記憶される。表示処理部42は、移動位置情報の補正が必要であると判別すると、現在地位置情報と移動位置情報との時差を算出する。表示処理部42は、算出した時差に従って移動位置情報の日時情報を補正する。表示処理部42は、補正後の移動位置情報から各表示座標を求め、求めたそれぞれの表示座標に従って、シンボル及び日時をディスプレイ41に表示する。
(もっと読む)
移動通信端末装置
【課題】 GPS受信機を利用して目的地に誘導する移動体通信端末であって、総消費電力の低い移動体通信端末を提供することを目的としている。
【解決手段】 移動体通信端末101の制御部8は、基地局201からの到来電波を、基地局電波送受信部2で受信し、目的地から距離の遠い基地局からの到来電波を受信した場合は、消費電力の低い基地局現在地測位部3に基づき現在位置を測位し、目的地周辺領域の基地局からの到来電波を受信した場合は、測位精度の高いGPS現在地測位部6に基づいて現在位置を測位する。
(もっと読む)
掘削機の3D集積レーザおよび無線測位誘導システム
掘削機の3D集積レーザおよび無線測位誘導システム(Ex_3D_ILRPGS)は、掘削機(14)の2D水平座標を得るよう構成された移動無線測位システム受信機(12);掘削機のブーム(36)、スティック(38)およびバケット(40)の座標を得るよう構成されたバケット−機械本体測位システム(16);少なくとも1本のレーザビーム(26)を受信するよう構成され、実質的に高い精度で局所的な垂直座標を与えるよう構成されたレーザ検出器(24);移動無線測位システム受信機によって得られた掘削機の2D水平座標と、バケット−機械本体測位システムによって得られた掘削機のブーム、スティックおよびバケットの座標と、レーザ検出器によって得られた局所的な垂直座標とを受信して統合するよう構成され、実質的に高い垂直精度で掘削機のバケットの切刃を誘導するよう構成されたオンボードナビゲーションシステム(28)を含む。 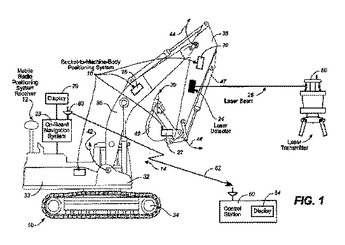 (もっと読む)
(もっと読む)
慣性航法システムを増補するシステムおよび方法
【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
自律移動装置
【課題】マルチパス環境下においても精度良い測位ができ、走行経路に対して精度良く走行することができる自律移動装置を提供することにある、
【解決手段】自律移動装置1の測位部3は、平面内で規定した絶対座標系における座標位置を既知位置に配置された少なくとも3台の電波発信器21〜23からの電波の到来方位を用いて検出する。この際測位アルゴリズム処理部35は、電波発信器21〜23の少なくとも一つについて直接波と反射波とを共に設定し、直接波と反射波との別を考慮して電波発信器21〜23を3つ選択して組にし、各組毎に、各電波発信器からの電波の到来方位を用いて求めた座標位置から既知の電波発信器21〜23を見込む時の各電波発信器21〜23の存在方位を求めるとともに、到来方位と存在方位とを照合して到来方位と存在方位ととが整合すると判定された直接波と反射波との別を考慮した電波発信器の組から得られた座標位置を採用する。
(もっと読む)
側位システムおよび無線通信装置
【課題】移動局と基地局および基地局同士の同期システムが不必要であり、設置する基地局数が最低1個あれば移動局の位置を算出することの可能な側位システムを提供する。
【解決手段】1つの基地局200により側位の対象となる移動局100は、タイミング信号をトリガにして生成された超広帯域(UWB)方式による信号を基準拡散符号(PN0)で拡散して基準拡散信号とする基準拡散器104と、基地局から反射信号を受信する第1、第2の受信部110、118と、第1の受信部で受信した信号から所定の拡散符号(PN1)との相関により反射信号を検出する第1の相関器114と、第2の受信部で受信した信号から所定の拡散符号(PN1)との相関により反射信号を検出する第2の相関器118と、第1、第2の相関器により検出された反射信号とタイミング信号との時間差を測定する時間差測定部126とを備える。
(もっと読む)
61 - 80 / 122
[ Back to top ]