
Fターム[5J062AA05]の内容
Fターム[5J062AA05]に分類される特許
101 - 120 / 122
位置判定システム及びその制御方法

【課題】 複数の監視対象の位置を同時に判定し、監視対象領域を自由に指定し、出入り口が存在しない場合でも適用可能で、高精度で位置を判定可能な位置判定システム等を提供する。
【解決手段】 監視対象に各々取り付けられ、あるいは、携帯されて、インパルス状の電波を出力する送信器5、6、7と、送信器5、6、7から出力された電波を受信する複数の受信器8、9と、複数の受信器8、9に各々信号伝送特性が等しいケーブル12、13を介して接続され、ケーブル12、13を介して伝送された複数の受信器8、9の出力信号に基づいて、送信器5、6、7が監視対象空間A内のいずれの位置に存在するかを判別する位置判定装置10とを備える位置判定システム。位置判定装置10は、監視対象空間Aを複数の空間A1、A2に分割し、各空間毎に送信器が当該空間内に存在するか、当該空間外に存在するかを判別できる。
(もっと読む)
直通通信モードで動作するピア間の位置特定を支援するための方法
位置決定(308)を実行するために衛星測位支援情報を必要とする、通信ネットワーク210のサービスエリア外の移動体通信装置(202)。移動体通信装置は、直接リンクを通じてピア移動体通信装置(204,206)から支援情報を受信する。 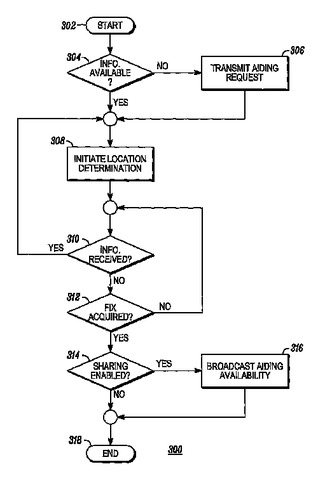 (もっと読む)
(もっと読む)
自走式の作業機械及び自走式の作業機械の遠隔操縦システム

【課題】一つのGPSの移動で車体の向きに係る情報を取得する場合に同情報の中から正確な情報を選別して取得できる自走式の作業機械を提供する。
【解決手段】遠隔操作器25で遠隔操縦されGPSアンテナ14及びGPSレシーバ15を有するGPSを車体1に設置し、GPSでのGPSアンテナ14の位置の検出結果を工事事務所20側へ逐次送信しながら移動する自走式の作業機械において、GPSアンテナ14を第1の位置から第2の位置へ水平移動させる水平移動装置17と、走行停止を検出する走行状態検出手段と、走行状態検出手段での検出結果に基づいて走行停止が判別されたときに水平移動装置17でGPSアンテナ14を第1の位置から第2の位置へ移動させる制御用コントローラ12とを設け、走行停止が判別されたときにGPSアンテナ14の第1の位置及び第2の位置に係る各水平位置のデータを取得するように構成した。
(もっと読む)
車載用ナビゲーション装置
【課題】分岐する2本の道路のなす角度が微小であっても分岐後の自車位置を高精度に表示できる「車載用ナビゲーション装置」を提供する。
【解決手段】車載用ナビゲーション装置は、メモリ手段と、走行状態検出手段と、GPS受信手段と、制御手段とを有する。前記制御手段は、第1の道路上の分岐点での第2の道路のなす角度が所定の分岐角度より小さく(S11)且つ分岐後の前記第1の道路と第2の道路のなす角度が所定の角度より小さい(S12)場合において、自車位置が前記第1又は第2の道路に進入したことを検出したときに、GPS測位点を中心とした誤差円を所定の割合で段階的に小さくしながら(S15)該誤差円の範囲内に前記自車位置が存在するか否かを判定し、当該誤差円の範囲から自車位置が外れたときに該自車位置を前記第1又は第2の道路のうち当該誤差円の範囲内の道路にマッチングさせる。
(もっと読む)
衛星信号から導かれるドリフト推定を使用したGPS受信機の調整可能クロック
ナビゲーションシステムは、少なくとも1つの全地球測位衛星信号を受信して、全地球測位衛星情報を出力するための全地球測位衛星受信機を備える。ナビゲーションシステムはさらに、ソフトウェアを実行するために、全地球測位衛星受信機に通信できるように結合された、プログラム可能プロセッサを備える。ナビゲーションシステムはさらに、プロセッサクロック情報を出力するために、プログラム可能プロセッサに通信できるように結合されたクロックを備える。ソフトウェアは、GPS情報を使用してプロセッサクロック情報内のドリフトの量を推定し、調整済みプロセッサクロック情報を生成するために、ドリフトの量に対してプロセッサクロック情報を調整する。ソフトウェアは、少なくとも全地球測位衛星情報と調整済みプロセッサクロック情報の関数としてナビゲーション解を生成する。  (もっと読む)
(もっと読む)
測位システム
【課題】位置が既知である複数個の電波発信器からの電波の到来方向を用いて自己位置を決定する際に、自己位置が不定にならないように測位することを可能とする。
【解決手段】電波発信器1は絶対座標系における位置が既知であって電波を送信する。アンテナ装置2は4個以上の電波発信器1からの電波を受信し、各電波発信器1からの電波の到来方向を検出する。アンテナ装置2で得られた到来方向と電波発信器1の位置とを用いて各2個の電波発信器1とアンテナ装置2との3点を通る円周C1,C2を2個設定し、円周C1,C2同士の交点のうち電波発信器1の位置を除く位置をアンテナ装置2の位置として求める。ただし、一つの円周C1の内外に規定幅で設定した判定領域D1に3個以上の電波発信器1を含むときには、円周C2を求めるための2個の円周のうちの一方の電波発信器1として判定領域D1外の電波発信器1を用いる。
(もっと読む)
無人搬送車の誘導装置
【課題】 走行路の誘導標識体を不要として走行路の工事費用を縮小すると共に、車輌コストを低減することができる無人搬送車の誘導装置を提供すること。
【解決手段】 屋外の見晴らしの良い走行路では、GPS信号および第1カルマンフィルタ13に基づいて、慣性航法演算部11で算出された無人搬送車1の位置及び方位(N,E,θ)の誤差を補正し、一方、屋内あるいは遮蔽物などによりGPS信号が切れた場合には、レーザレーダ10および第2カルマンフィルタ15により、無人搬送車1の位置及び方位(N,E,θ)の誤差を補正する。これにより、屋外および屋内を問わず如何なる場所においても、走行路に誘導標識体を必要とせずに、精度良く無人搬送車1を誘導することができる。
(もっと読む)
スペクトル拡散信号
【課題】高レベルのスペクトル制御と良好な全同期能力とを組み合わせたスペクトル拡散信号を提供すること
【解決手段】スペクトル拡散信号は、第1波形レートでの第1バイナリ波形と第2波形レートでの第2バイナリ波形との実数の線形結合を備え、キャリア波を変調する拡散波形を備え、前記第1波形レートは前記第2波形レートと異なり、双方の波形レートはゼロでなく、前記線形結合は、信号識別符号を備えた少なくとも1つのバイナリシーケンスにより変調される。
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
無線タグの位置推定システム
【構成】無線タグの位置推定システムは、所定空間に配置された複数の無線タグ読取機14を含む。この所定空間に配置された読取機14による検出に基づいて、その検出時刻における所定空間内の無線タグの位置が推定される。その位置の推定された無線タグを目標として移動型ロボット16の移動が制御させる。移動型ロボット16には無線タグ読取機18が設けられている。この読取機18によって目標とされた無線タグが検出されたとき、読取機18による検出に基づいて、当該検出時刻における当該無線タグの推定位置座標が算出されて記録される。
【効果】無線タグの位置をより正確に推定することができる。
(もっと読む)
加速度計およびGPS受信機を用いた発射体の誘導
発射体には、その本体の直交座標系があることを特徴とする、ジャイロを持たない発射体誘導システム。この発射体には、3軸の加速度計があり、x、y、およびz軸に沿って測定したx、y、およびz加速度データを提供する。GPSアンテナおよび受信機手段は、機内に搭載したGPSからの位置および速度データを、地球の基準航行座標系で提供する。コンピュータおよびプログラム手段は、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、またそれにアクセスし、さらに、x、y、およびz軸加速度データを、本体座標系から航行座標系へと変換する。プログラム手段は、対応する時間インデックス付き加速度データと、GPS速度データおよび位置データとに応答し、推定した発射体のロール角、ピッチ角、およびヨー角を、最適なスムージング技術を用いて、現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して計算し、発射体を所定の位置に誘導する飛行制御システムに出力する。 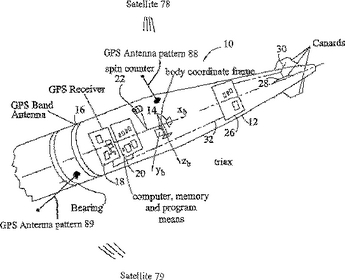 (もっと読む)
(もっと読む)
位置測定制御方法
【課題】 本発明により、GPS や無線LAN を用いたシステムでは出来なかった、通信機を有しない物体の位置を測定することが可能となり、またカメラを用いたシステムでは困難であった死角や暗所の物体も、電波等の物体を透過して測定可能なセンサを用いる事で測定が可能とすることを目的とする。
【解決手段】 本発明は、複数の該距離測定用センサを制御する制御部とで構成され、該制御部が複数の該距離測定用センサから測定結果を収集する位置測定制御方法において、該制御部が測定開始を指示する制御信号に同じ識別信号を付加して、各々の該センサに同時或いは連続して送信し、各々のセンサは制御部からの該制御信号を受信し、距離測定を開始して、距離測定が終了すると、測定結果に、該制御部で付加されたと同じ識別信号を付加して制御部に返信する位置測定制御方法を用いる。
(もっと読む)
二重冗長GPSを用いて妨害を防止する航空機の航行システム
【課題】
【解決手段】本発明は、無人の航空機の航行システムである。航行システムは、地球上の位置探査システムの信号を受信する第1のアンテナと、第1のアンテナに接続されて、第1の干渉抑制技術を用いて、地球上の位置探査システムの信号の干渉を抑制する第1の干渉抑制ユニットと、第1の干渉抑制ユニットから信号を受信する第1の航行ユニットと、地球上の位置探査システムの信号を受信する第2のアンテナと、第2のアンテナに接続されて、第2の干渉抑制技術を用いて、地球上の位置探査システムの信号の干渉を抑制する第2の干渉抑制ユニットと、第2の干渉抑制ユニットから信号を受信する第2の航行ユニットとを具えている。該装置によって実行される航空機の航行を制御する方法も、本発明に含まれる。  (もっと読む)
(もっと読む)
衛星から送信される三搬送波電波信号と電離層補正とを用いるリアルタイムナビゲーションの方法およびシステム
本発明は、ユーザの位置を決定するために、衛星(SAT1−GPSEE1〜ASATn−GPSEEn)から送信される、異なる3つの周波数の三搬送波電波信号を用いて移動体(SUR)の位置を特定するリアルタイムナビゲーションの方法に関する。方法は、エクストラワイドレーン搬送波位相曖昧さを決定する第1のステップと、長経路位相曖昧さを推定する第2のステップと、複数の周波数のうちの1つの位相曖昧さを決定する第3のステップとを含む。追加ステップの1つでは、第3のステップの間に電離層補正をリアルタイムで適用する。前記電離層補正は、地上固定基準局(REF−REFE)によって計算される前記電離層の常時更新される電離層モデルに基づき、いわゆるマスタ地上固定基準局(REFM−REFME)によって計算される測地データと組み合わせられる。本発明は、前記方法を実施するためのシステムにも関する。  (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】 移動体に対するアンテナの設置位置を自動的に精度良く検出することができるナビゲーション装置を提供すること。
【解決手段】 ナビゲーション装置は、GPS衛星から送信される電波に基づいて車両に装着されたアンテナ1の絶対位置を算出する測位手段3と、GPS衛星から送信される電波の受信状態に基づいて、アンテナ1の絶対位置における天空上のGPS衛星の配置を算出する受信衛星予測手段11と、車両の絶対方位を算出する絶対方位算出手段4と、車両の絶対方位に対するGPS衛星の受信状態に基づいて、車両におけるアンテナ1の設置位置を検出するアンテナ位置検出手段12とを備える。
(もっと読む)
位置情報取得システム、携帯端末装置、および位置情報取得方法
【課題】 安価で効率的に施設利用者の位置情報を取得するとともに、メンテナンスの簡便化を図ること。
【解決手段】 携帯端末装置100は、識別情報保持装置200aや識別情報保持装置200bへ無線で電源を供給し、これらの識別情報保持装置200a、200bに保持されている装置固有の識別情報を読み取る。そして、携帯端末装置100は、自装置の識別情報と識別情報保持装置200a、200bの識別情報とを情報処理装置300へ送信する。情報処理装置300は、携帯端末装置100から送信された識別情報のうち、識別情報保持装置200a、200bの識別情報に対応する位置情報を検索し、この位置情報を携帯端末装置100へ返信する。
(もっと読む)
飛翔体
【課題】飛翔体の機体の機軸回りに対する指向性利得はもとより、飛翔体の機体の前後方向の指向性利得をも確保して、ランチャ搭載時の姿勢を含めていかなる飛翔姿勢においてもGPS信号を受信することができる飛翔体搭載用アンテナ装置を提供する。
【解決手段】高速で機軸P回りに回転する飛翔体1に搭載するアンテナ装置10であって、導線を折り返して形成されて長尺平行2本線部12及びこの長尺平行2本線部12と直交する短尺平行2本線部13を有するL字形折り返しアンテナ11と、グランド板14を備え、L字形折り返しアンテナ11の長尺平行2本線部12を飛翔体1の機軸Pに沿わせた状態で短尺平行2本線部13を飛翔体1の機体2の先端面2aに固定して飛翔体1の給電部4に接続すると共に、グランド板14を飛翔体1の機軸Pに沿わせた状態で且つL字形折り返しアンテナ11の短尺平行2本線部13と直交して接触させた状態で固定する。
(もっと読む)
ヒストリカル相関データを使用して信号相関を実行する方法及び装置
衛星測位システム受信機において衛星信号パラメータを推定する方法及び装置が記載されている。一実施形態では、衛星信号と基準信号との間の複数の相関結果がプロセッサからのコマンドに応答して生成される。少なくとも1個の衛星信号パラメータが衛星測位システム受信機に統合されたコプロセッサを使用して複数の相関結果から推定される。少なくとも1個の衛星信号パラメータはその後プロセッサへ供給される。 (もっと読む)
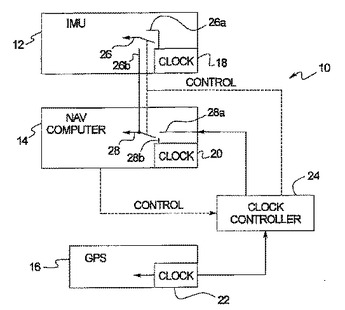
ディープインテグレーション用GPS/IMUクロック同期
航法システムは慣性計測ユニット、航法コンピュータ、GPS受信機、クロックコントローラを備える。慣性計測ユニットは第1のクロックと第1のスイッチを備え、航法コンピュータは第2のクロックと第2のスイッチを備え、GPS受信機は第3のクロックを備える。第1と第2のスイッチはクロックコントローラで制御される。このため、慣性計測ユニット、航法コンピュータ、GPS受信機においてそれぞれ自身のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータにおいて第2のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータとGPS受信機において第3のクロックを使用することができる。
 (もっと読む)
(もっと読む)
ローカル測位のための双方向RF測距システム及び方法
測位システムは、RF信号を交換するように構成された複数のデバイスを含む。第1のデバイスは、他の各々のデバイスからそれに割り当てられたタイムスロット中で周期的にメッセージを受信する。この受信されたメッセージは、第1のデバイスから送信されたそれぞれのメッセージの他のデバイスにおける到達時間を表す情報を含む。他の各々のデバイスからのメッセージの到達時間は、第1のデバイスによって測定される。第1のデバイスは、周期的にメッセージを他のデバイスに送信するが、送信された各々のメッセージには、他のデバイスの内の少なくとも1つのデバイスに対する測定到達時間を表す情報が含まれている。第1のデバイスから複数の他のデバイスの各々への距離は、他のデバイスからのメッセージの測定された到達時間と他のデバイスからのメッセージ中の到達時間情報との関数として決定される。 (もっと読む)
101 - 120 / 122
[ Back to top ]