
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
641 - 660 / 675
位置情報を取得するための装置及び方法
衛星測位システムから信号を受信し且つ通信システムから信号を受信するための無線受信器は、受信器における共通の経路を使用するとともに、コードとの相関(50,210,220)により受信信号から位置情報を取得する(60,230)。第1のモードにおいて、取得は、通信信号のために使用されるタイムスロットにおいて受信される選択された信号を排除する受信信号から行われる。第2のモードは、そのような選択された信号を含んでいる。これにより、精度と位置プロセッサの待ち時間との間のトレードオフを制御して、一連の状態に亘って性能を向上させることができる。モード入力は、信号強度に従って又はアプリケーションのニーズに従って動的に変化させることができる。  (もっと読む)
(もっと読む)
測位用受信装置

【課題】 受信信号が反射波であるのか直接波であるのか、あるいはその混合によるものであるのかの判定を高精度に行えるようにして、位置や速度の測定を高精度に行えるようにする。
【解決手段】 判定対象衛星を除く複数の衛星に基づいて受信点の測位を行うとともにその位置変化速度Rvを求め、判定対象衛星の軌道情報と受信点の位置と判定時間とに基づいてその判定時間での判定対象衛星の位置変化速度Svaを求める。また、受信点位置の変化速度Rvと判定対象衛星の位置変化速度Svaを用い、判定対象衛星から直接波を受信している場合に相当するキャリア位相変化速度Cva´を推定する。そして、判定対象衛星からの電波の観測によるキャリア位相変化速度Cvaと判定対象衛星の推定キャリア位相変化速度Cva´とのずれ量εを求め、このεの大きさに応じて判定対象衛星の観測結果の採用の要否や信頼度を求める。
(もっと読む)
移動体の位置算出装置および算出方法

【課題】 速度データの補正をより正確に行うことができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置1は、測位された速度データが予測加速度最大値(第1の予測範囲)内にあるか否かを判定する第1の判定部16aと、測位された速度データが予測加速度最大値外と判定されたとき、当該速度データが予測加速度最大値の2倍の範囲(第2の予測範囲)内にあるか否かを判定する第2の判定部16bと、当該速度データが第1の予測範囲外であってかつ第2の予測範囲内であるとき、当該速度データを第1の補正速度に補正し、当該速度データが第2の予測範囲外であるとき、当該速度データを異常速度として当該速度データを第2の補正速度に補正し、補正された速度データに基づき移動体の位置を算出する位置算出部18とを有する。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 電源投入後や長時間無測位状態からの測位開始時に、精度の高い初期位置を得ることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置は、測位開始時に、差分距離Lを算出するステップと、少なくとも差分距離Lが閾値より小さいか否かを判定するステップと、閾値よりも小さいと判定されたとき、測位データから算出された位置を初期基準点位置と決定し、閾値以上であると判定されたとき、前回測位時の基準点位置に今回測位時の速度ベクトルを加算した値を暫定的な基準点位置と決定するステップとを有する。
(もっと読む)
加速度計およびGPS受信機を用いた発射体の誘導
発射体には、その本体の直交座標系があることを特徴とする、ジャイロを持たない発射体誘導システム。この発射体には、3軸の加速度計があり、x、y、およびz軸に沿って測定したx、y、およびz加速度データを提供する。GPSアンテナおよび受信機手段は、機内に搭載したGPSからの位置および速度データを、地球の基準航行座標系で提供する。コンピュータおよびプログラム手段は、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、またそれにアクセスし、さらに、x、y、およびz軸加速度データを、本体座標系から航行座標系へと変換する。プログラム手段は、対応する時間インデックス付き加速度データと、GPS速度データおよび位置データとに応答し、推定した発射体のロール角、ピッチ角、およびヨー角を、最適なスムージング技術を用いて、現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して計算し、発射体を所定の位置に誘導する飛行制御システムに出力する。 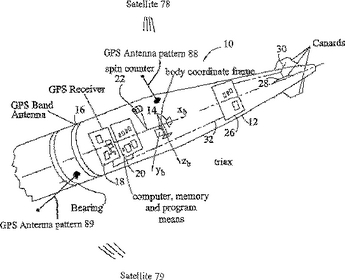 (もっと読む)
(もっと読む)
移動通信端末および位置情報利用方法
【課題】 より的確に基地局位置情報とGPS位置情報とを利用できる携帯電話機を提供すること。
【解決手段】 この携帯電話機10は、携帯電話機10をその配下に置いている少なくとも一つの基地局の位置を利用して算出される携帯電話機10の第1位置情報を取得する第1位置取得部12と、全地球測位システムを利用して携帯電話機10の第2位置情報を取得する第2位置取得部13と、第1位置情報及び第2位置情報それぞれの精度を比較する精度比較部14と、比較結果に応じて、第1位置情報又は第2位置情報を選択的に利用する位置情報利用部15と、を備え、位置情報利用部15は、精度比較部14の比較結果に係わらず第1位置情報を利用した後に、精度比較部14の比較結果に応じて、第1位置情報及び第2位置情報のいずれか精度の高い位置情報を利用する。
(もっと読む)
ナビゲーション装置
【課題】 非自走状態で搬送された車両が搬送先に到着した際に、車両の正しい位置及び方向を迅速に呈示できるナビゲーション装置を提供する。
【解決手段】 絶対位置検出部6(GPS受信機)での絶対位置を示す検出結果と、相対角度検出部5及び車両I/F部10からの相対的位置を示す情報とから、車両の位置を推定する。非自走状態で搬送された車両が搬送先に到着したときに、絶対位置検出部6(GPS受信機)での検出結果に基づいて車両位置を推定する際の基準を緩和する。異なる基準を記載した複数の基準テーブルA,Bを準備しておき、非自走状態で搬送された車両が搬送先に到着したときに、基準の条件が緩やかな方の基準テーブルを使用する。
(もっと読む)
位置決定方法、装置およびシステム
【課題】 端末間の距離から推定された位置に対して、設備の設置上の特徴を考慮し、設備の設置状態に則すように位置を修正し、設備の設置状態からビル構造を判断する。
【解決手段】 平面空間上に設定した基準座標系201により、複数の端末101、代表端末110が配置された位置を座標により決定する方法であって、計測した端末間距離に基づいて算出した、基準座標系201における端末101、代表端末110の位置の座標に基づいて、平面空間を例えばボロノイ領域301に分割する工程と、想定した端末配置の特徴に基づいて生成した少なくとも一つのテンプレート401とボロノイ領域301との比較に基づいてボロノイ領域301(端末101、代表端末110)毎に類似度を算出する工程と、類似度に基づいて端末101、代表端末110の位置の座標を修正するかどうかを判断し、修正すると判断した座標を修正する工程とを少なくとも有する。
(もっと読む)
変位監視方法、変位監視システムおよび監視装置
【課題】森林の茂みを通過して誤差を含むGPS信号が到達する場合でも、その衛星の信号を最大限使用しつつ、観測精度を低下させない変位監視システムを提供する。
【解決手段】観測点において各GPS信号から到来した信号のうち測位誤差が大きい信号、すなわちマルチパスによる誤差が大きい信号の方向(方位・仰角)の範囲を割り出す。この方向範囲に森林の茂みが存在し、信号は到達するが、マルチパスによる誤差が大きい範囲と考えられる。この範囲を禁止方向範囲とし、信号が到来してもその信号を使用しないようにする。一方、どの衛星であっても、この方向範囲以外から到来する信号は使用する。これにより、誤差の大きい信号を使用することなく、衛星が良い条件の位置にある場合には使用して使用可能な衛星(信号)の数を確保する。
(もっと読む)
観測データ出力測位用受信機
【課題】 測位系の正確な時刻に同期したタイミングでの観測データを出力できるようにした観測データ出力測位用受信機を構成する。
【解決手段】 受信機側の時計による所定周期のサンプリングタイミングで測位用衛星からの電波に含まれているコード位相を求め、受信点の測位演算により測位系時刻での観測時刻と、サンプリングタイミングとのずれであるサンプリングオフセットを求め、サンプリングオフセットにより生じる測位用衛星の位置ずれと受信機の時計のずれとによる第1の観測距離のずれ分と、サンプリングオフセット分の時間に電波が伝搬する距離である第2の観測距離のずれ分とをそれぞれ補正し、測位系の正確な時刻に同期したタイミングでの観測データ出力する。
(もっと読む)
測位システム、情報提供装置、情報提供装置の制御プログラム、端末装置、端末装置の制御プログラム
【課題】衛星信号に乗せられた軌道情報よりも有効期間が長い衛星予測位置情報を提供することができる測位システム等を提供すること。
【解決手段】情報提供装置20は、位置情報衛星101等の衛星軌道を示す衛星軌道情報252を取得する衛星軌道情報取得手段と、衛星軌道情報252に基づいて、衛星初期速度情報を生成する衛星初期速度情報生成手段と、衛星軌道情報252に基づいて、衛星初期位置情報を生成する衛星初期位置情報生成手段と、位置情報衛星の加速度に影響する物理量を示す加速度影響物理量情報を格納する加速度影響物理量情報格納手段と、衛星初期速度情報と衛星初期位置情報及び加速度影響物理量情報に基づいて、位置情報衛星の加速度を示す衛星加速度情報を生成する衛星加速度情報生成手段と、衛星初期速度情報と衛星初期位置情報及び衛星加速度情報に基づいて、衛星予測位置情報を生成する衛星予測位置情報生成手段とを有する。
(もっと読む)
グローバル・ナビゲーション・システムのユーザにインテグリティ情報を提供する方法及び装置
本発明は、測位装置へ情報を送信する複数の衛星などの宇宙航行体を備えて成るグローバル・ナビゲーション・システムのユーザにインテグリティ情報を提供する方法に関するものであり、この方法は、送信される前記情報が、障害発生状態にある宇宙航行体のシグナル・イン・スペース・エラーSISEの正確度についての前記グローバル・ナビゲーション・システムが生成する第1情報と、前記グローバル・ナビゲーション・システムが障害発生状態にある宇宙航行体を障害発生状態にあると評価しているか否かを示している第2情報とを含んでいることを特徴とする。
ガリレオ・ナビゲーション・システムなどのグローバル・ナビゲーション・システムにおいてインテグリティ情報を提供している公知のインテグリティ提供方式では、障害は常に検出可能であることを前提条件としているのに対して、本発明では、障害が発生していることの確からしさが検出可能であることを前提条件としている。これによってグローバル・ナビゲーション・システムのパフォーマンスを向上させることを可能にしている。更に、根拠のない前提条件を採用しないことによってもサービスの品質を向上させている。
(もっと読む)
衛星位置確認システムのための較正および修正システム
実用的な移動位置確認システムにおいて、正確かつ迅速な位置測定を提供するために、GPS受信機は、外部から伝送された信号にロックされた第1の周波数、およびGPS発振器により発生された第2の周波数を使用して予測される、次の時間期間における周波数誤差を較正される。次の時間期間における誤差を予測するために、いくつかの測定が時間にわたってなされ、誤差推定値が作られ、誤差関数が誤差推定値の組に応答して近似される。そしてこの予測された誤差は、次の時間期間にGPS受信機を修正するのに使用される。1つの実施では、予め定義された理想的なセルラー周波数で動作するセルラー局のネットワークを使用してセルラー通信を提供するため、および予め定義されたGPS周波数でGPS信号を送信するGPS衛星を使用して位置確認をまた提供するために、多機能携帯用装置が開示される。  (もっと読む)
(もっと読む)
放送軌道暦情報を使用しない位置決定
長い時間帯に亘って放送軌道暦データなしで位置情報を決定するためのデバイス及び方法が記述されている。サーバ又はクライアントデバイスは、衛星測位システムの衛星の履歴状態データを受信又は収集し、将来の時間帯に亘って将来の衛星軌道の予測を作成する。サーバが予測を作成した場合には、その予測は、その後クライアントデバイスに転送される。クライアントデバイスは、当該時間に適した予測を選択する。この時間は、少なくとも7暦日の期間中の任意の時間であり得る。クライアントデバイスは、予測に関する情報を使用して衛星状態を再構築し、その再構築された衛星状態を使用して、クライアントデバイスの現在の場所及び時間に適した衛星信号を取得する。クライアントデバイスは、衛星状態の情報及び衛星信号のタイミング情報を使用して、その位置を決定及び/又は追跡する。  (もっと読む)
(もっと読む)
衛星を用いた測位方法、測位プログラム、及びGPS受信装置
【課題】 高精度な測位をリアルタイムに行うとともに、連続的に測位結果を出力する。
【解決手段】 DGPSにより仮の解を導出し、導出した仮の解の情報を用いて、真の解が存在する第1の空間領域を求める。第1の空間領域を線形写像した第2の空間領域内に存在する所定の解を真の解となりうる解候補とし、解候補のそれぞれについて、χ二乗検定を行う。χ二乗検定の結果、解候補が1つに限定された場合に、限定された解候補を真の解し、真の解から整数サイクルを得る。
(もっと読む)
位置観測システム
【課題】位置が既知の場所に設けられた基準局から、数10km以上離れた地点の3次元位置を、数cmレベルの高精度で観測することができる、衛星信号の搬送波を利用した位置観測システムを提供する。
【解決手段】基準局と目標位置観測局との間に、直列状にそれぞれ所定距離ずつ離れた場所に、複数の中間位置観測局を配置し、全ての観測局の観測位置を基準局から近い順番に求める。これにより、衛星信号搬送波の伝搬経路の状態に影響されることを低減する。
その基準局は陸上に設置され、中間位置観測局と目標位置観測局は海上に配置されて、潮位や波高などを高精度に且つリアルタイムに観測する。
(もっと読む)
測位システムを対象とする評価装置、評価方法、評価装置の制御プログラム、評価装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】測位システム全体の性能を評価することができる評価装置等を提供すること。
【解決手段】模擬測位端末と、模擬測位補助情報手段と、模擬中継手段と、模擬通信網と、を有し、少なくとも、模擬測位端末、模擬測位補助情報手段、模擬中継手段のいずれかに、評価装置動作記録情報生成手段と、評価装置動作記録情報記憶手段と、性能評価手段と、が備わっていて、少なくとも、模擬測位端末又は模擬測位補助手段のいずれかに、位置情報生成手段と、位置情報記憶手段とが備わっていることを特徴とする測位システム評価装置2。
(もっと読む)
ID発信器、例えば車両キーとして構成された移動形送信装置の位置を特定する方法および装置
本発明は、基地局として構成された受信装置を基準にして、ID発信器(5)、例えば車両キーとして構成された移動形送信装置の位置を特定し、またID発信器(5)から送信された信号11aのマルチパス伝搬11bを識別する方法および装置に関しており、ここでは前記の基地局において向きの異なる少なくとも2つの受信領域(3a〜3d,27a,27b)を用いて、送信信号(9),11aのシングルパス伝搬およびマルチパス伝搬を受信信号(9),11bとして検出し、また受信信号(9),11bの電界強度を各受信領域(3a〜3d,27a,27b)に依存して検出し、最大の電界強度を有する受信信号(9)ならびに各受信アンテナに対応付けられた受信領域(3a〜3d,27a,27b)を求めて、上記のID発信器(5)の方向として位置を特定する。  (もっと読む)
(もっと読む)
測位システム、情報提供装置、情報提供装置の制御方法、情報提供装置の制御プログラム、情報提供装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】端末装置の負担を軽減しつつ、マルチパスを除去することができる測位システム等を提供すること。
【解決手段】情報提供装置50は、端末装置20から現在位置の仮座標を示す仮座標情報を受信する仮座標情報受信手段と、環境構成物の位置及び高さを含む地図情報を格納する地図情報格納手段と、地図情報と仮座標情報に基づいて、仮座標を含む規定領域の地図を示す規定領域地図情報を生成する規定領域地図情報生成手段と、仮座標情報に基づいて、仮座標の上空に位置する前記位置情報衛星である上空衛星に関する上空衛星情報を生成する上空衛星情報生成手段と、規定領域地図情報と上空衛星情報に基づいて、仮座標から観測不可能な前記上空衛星を示す観測不能衛星情報を生成する観測不能衛星情報生成手段と、観測不能衛星情報を前記端末装置に送信する観測不能衛星情報送信手段と、を有する。
(もっと読む)
周波数間バイアス算出装置及び方法
【課題】 簡単な構成で電離層遅延量を正確に求める。
【解決手段】 周波数間バイアス算出装置10は、データ収集部11、周波数間バイアス算出部12、データ出力部13等を備えている。データ収集部11は、GPS衛星40からGPS受信機20,21,22,…までの第一の周波数による各第一の擬似距離と第二の周波数による各第二の擬似距離とを、通信回線41を介してGPS受信機20,21,22,…から入力する。周波数間バイアス算出部12は、データ収集部11から入力した複数の第一及び第二の擬似距離を所定の演算式に代入して、第一及び第二の周波数による周波数間バイアスを算出する。データ出力部13は、周波数間バイアス算出部12で算出された周波数間バイアスを、通信回線41を介してGPS受信機20,21,22,…へ出力する。
(もっと読む)
641 - 660 / 675
[ Back to top ]