
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
541 - 560 / 675
非見通し軽減のためにマルチパス通信路統計を利用する加重最小二乗位置決め方法
方法は、加重最小二乗(WLS)手法に基づいてNLOS状態を軽減する。その場合、加重値は受信信号のマルチパス成分(MPC)から導出される。加重方法論は、線形及び非線形最小二乗モデルの双方、並びに、剰余ベース・アルゴリズム又は最大尤度手法などのような異なる他のNLOS軽減スキームで使用され得る。 (もっと読む)
携帯型ナビゲーション装置及びナビゲーションプログラム

【課題】GPS信号から正しく方位情報を受信できない場合においても、自動的に精度の良い方位情報を取得しナビゲーションを行うことが可能な携帯型ナビゲーション装置を提供する。
【解決手段】仮想COMソフトウエア27は、GPSチップ21から入力したNMEAメッセージを解析し、NMEAメッセージ内の方位情報が正確であるか否かを判定する。正確であると判定した場合には、仮想COMソフトウエア27はNMEAメッセージをそのまま地図ナビゲーションアプリケーション28に出力する。一方、正確でないと判定した場合には、仮想COMソフトウエア27はNMEAメッセージ内の方位情報を地磁気センサ23で検出した方位情報に置き換えた上で、地図ナビゲーションアプリケーション28に出力する。
(もっと読む)
測位装置、ナビゲーションシステム
【課題】GPS衛星が捕捉困難な状態であっても、従来の地図データを使用して、精度よく測位することができる測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段81により移動体の位置を検出する測位装置9において、移動体の挙動情報を検出する第1及び第2の自律センサ2、4、3と、測位結果に第1の自律センサによる検出情報を累積して推定位置及び推定方向を検出する位置検出手段82と、推定位置に基づき地図データ記憶手段5を参照し対応するリンクから所定距離の地図データ推定位置を検出する地図データ測位手段83と、測位結果に第2の自律センサによる検出情報を累積して累積推定方向を検出する方向検出手段84と、推定位置及び地図データ推定位置並びに推定方向及び累積推定方向をカルマンフィルタに適用して移動体の位置を推定する最尤位置推定手段85と、を有することを特徴とする。
(もっと読む)
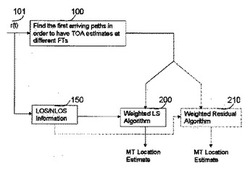
受信信号の到来時間と端末位置を共同推定するための反復法
【課題】 マルチパスチャネル特性と移動体ネットワークからの情報の両方を使用する位置推定システムにおいて、NLOSの影響を軽減するための方法を提供する。
【解決手段】この方法は、端末位置の推定で最初に到来するパスの推定を改善及びその逆をしながら、受信信号の最初に到来するパスと端末位置とを反復して推定する。ピーク選択方法が、異なる各固定端末での受信信号のおよその到来時間(TOA)を決定し、移動ユニットの位置の推定が行われる。残差が不十分な場合、逆方向検索アルゴリズムによりTOAが改良される。新規TOAは、移動端末の位置推定の改良に使用される。さらに、逆方向検索アルゴリズムのパラメータは、推定された最初のパス内のより高い精度のために修正できる。最初に到来するパスの推定と位置推定は、収束条件又は終了条件に到達するまで反復され通常はしきい値設定によって制御される。
(もっと読む)
地域的、広域、又は大域的キャリア位相差ナビゲーション(WADGPS)からローカル・リアル・タイム力学的(RTK)ナビゲーション・システムに移行するときに、位置情報の信頼性を高める方法
【課題】本発明は、ローカル測位システムと、ローカルRTKシステムと、地域、広域、又は大域差動搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、ローカル測位システム、RTK及びWADGPSナビゲーション技術を別個に使用すると随伴する短所を回避する。本方法は、WADGPSからの情報に基づいて、前記対象の第1位置を判定し、ローカル測位/RTK測位システムからの位置情報に基づいて対象の第2位置を判定するステップを含む。その後、WADGPSによって判定した位置と、ローカル測位/RTK測位システムによって判定した位置とを比較する。WADGPS位置及びローカル測位/位置に既定の閾値を超える差がある場合、対象をナビゲートするためにWADGPS位置を用い、WADGPS位置及びローカル測位/RTK位置に既定の閾値未満の差がある場合、対象をナビゲートするためにローカル測位/RTK位置を用いる。  (もっと読む)
(もっと読む)
GPS測位データの誤認識判別方法および誤認識判別装置
【課題】測位データに跳躍現象が発生した場合でも、跳躍による誤認識を判別し得るGPS測位データの誤認識判別方法を提供する。
【解決手段】RTK方式によるGPS受信機1で得られた測位精度データを順次入力してフィックス解よりも精度が低いか否かを判断し、フィックス解よりも精度が低いと判断された場合に、GPS受信機で得られた測位データが誤認識データである可能性を示す誤認識フラグを立て、そして引き続き入力される測位精度データがフィックス解であると判断された場合で且つ誤認識フラグが立っている場合に、当該誤認識フラグが立つ以前におけるフィックス解状態の測位データを用いて、現在の測位データが誤認識データであるか否かの判別を行うようにした方法である。
(もっと読む)
衛星測位システムによる物体の変位抽出方法
【課題】測位データを受け取ることができない場合でもフィルタ処理を可能にし得る衛星測位システムによる物体の変位抽出方法を提供する。
【解決手段】RTK方式による高精度なGPS測位データにより津波などの周期性変位を抽出する方法であって、GPS受信機からの測位データが監視施設に届かなかったときに、そのデータの欠落部分に、届かなくなる直前の所定の計測時間における高精度なデータの平均値を用いて、データの補完を行うことにより、測位データの連続性を維持させる方法である。
(もっと読む)
GPS受信装置および位置検出方法
【課題】 コイン型電池やその他の電源によって位置検出を行う場合に、消費電力を低減する。
【解決手段】 デジタル信号処理部13は、複数の衛星から送信される電波の受信感度に基づいてGPS信号を受信可能な衛星を特定し、多チャネルデコーダ15のn個のチャネルデコーダは、GPS信号を復調して情報を抽出することができる。GPS制御回路部17は、特定された衛星のGPS信号を割り当てるチャネルデコーダを決定し、GPS信号が割り当てられたチャネルデコーダを動作状態に制御し、GPS信号が割り当てられないチャネルデコーダを動作停止状態に制御する。
(もっと読む)
電離層モデル補正方法
【課題】現実に則した電離層電子密度分布を決定することの可能な電離層モデル補正方法を提供する。
【解決手段】衛星信号(GPS、Galileo、QZS等)の複数周波を観測することにより衛星信号が通過する途中の総電子数TECをリアルタイムに求め、その値とIRIやBentモデルなどの電離層モデルに基づくTEC値とをと比較することにより、電離層モデルを補正するためのパラメータを算出する。
(もっと読む)
位置データ取得装置
【課題】取得した現在地の位置データを的確に補正する。
【解決手段】ユーザ携帯電話2のシャッタボタン6を操作すると、制御部3は、撮影を行うとともに、GPS算出部8にプログラム起動信号を出力し、GPS算出部8は、ユーザ位置データを算出する。そして、制御部3は、アンテナ7を介して、ユーザ携帯電話2の外部に向けて位置データ取得指令信号を発信する。現在地の位置データを取得する機能を有する第1,第2周辺携帯電話11,12は、位置データ取得指令信号を受信すると、得した第1,第2周辺位置データを第1,第2取得データ信号に変換して外部に向けて発信する。アンテナ7で第1,第2取得データ信号を受信すると、制御部3は、第1,第2周辺位置データとユーザ位置データとの平均値を算出し、算出した平均位置データを撮影した画像データに記憶した後、画像データをメモリ9に記憶する。
(もっと読む)
サーバ装置、移動端末及び測位方式選択方法
【課題】GPS単独での測位が実施できない状況下で利用可能な測位方式の内、誤差の少ない測位方式を選択するサーバ装置、移動端末及び測位方式選択方法方法を提供する。
【解決手段】計算サーバ300は、GPS衛星からの信号を受信し、基地局と通信を行うセルラ端末100の位置を推定する。計算サーバ300は、セルラ基地局200とセルラ端末100との距離に基づいて、セルセクタ測位あるいはハイブリッド測位のいずれの測位方式を用いるかを選択する測位情報解析部302と、測位情報解析部302によって選択された測位方式によって、セルラ端末100の位置を計算する位置検出部303とを備える
(もっと読む)
人工衛星に搭載した水晶発振器の時刻同期方法及びシステム
【課題】擬似時計技術はこれまではさまざまな遅延モデルを用いなければ実現できなかったが、本発明は、複数周波数の測位信号を用いることにより複雑な遅延モデルを用いなくても実時間で、予測伝搬時間の推定に誤差が含まれていても実現する。
【解決手段】本発明の地上局の時刻標準と人工衛星に搭載した水晶発振器の時刻を同期させる時刻同期方法は、地上局からは、人工衛星に到着したときに正確にその時刻になるように制御するため、種々の遅延原因に基づく遅延量を進めた時刻を発信する。測位信号の周波数差による遅延量の違いを利用するため複数の異なる周波数を用いて、地上局と人工衛星の間を測位信号が伝搬する時間を、それぞれ求める。測位信号受信機で測定した複数の擬似距離を光速度で除した遅延量とあらかじめ計算しておいた予測伝搬時間に基づき遅延補正量を演算し、この遅延補正量を前記遅延量に加えて進める。
(もっと読む)
無線端末の居場所の予測方法
【課題】アシストされたGPS対応の無線端末の位置特定補助データを生成するために、非GPS抽出技術を用いて、無線端末の位置を予測する方法を提供すること。
【解決手段】本発明によると、無線端末は、補助データを使用して1つ若しくは複数のGPS信号を取得し処理し、無線端末の位置の証拠となる情報を抽出する。GPS抽出位置情報は、その後、非GPS抽出位置と組み合わされ、無線端末の位置の予測値を形成する。このGPS抽出技術と非GPS抽出技術との組み合わせは、無線端末が1個若しくは2個のGPS信号しか取得できない場合には特に有用であり、その理由は、無線端末の位置を2個のGPS信号だけで決定するのは不可能だからである。
(もっと読む)
位置検出装置及び位置検出用プログラム
【課題】車両の位置検出システムとしての冗長性(対故障性)を向上させつつ、より正確な位置検出が可能な位置検出装置及び当該位置検出用のプログラムを提供する。
【解決手段】一つの車両の位置を示す位置情報を、相互に異なる位置検出条件の下で夫々生成する二つのGPSセンサ11及び12と、各GPSセンサ11及び12により生成された各位置情報夫々における位置検出精度につき、当該位置検出精度が高い方の位置情報を用いて車両の位置を算出する位置検出部2と、を備える。
(もっと読む)
無線端末の居場所の予測方法
【課題】地理的領域における未知の場所で、無線端末の位置を予測する技術を提供すること。
【解決手段】本発明によると、この技術は、電磁(無線)信号の特徴は、地形、受信器、送信器の位置、その他のファクタに依存するという認識に基づいている。例えば、特定の無線(基地)局からの信号が、第1位置では強く受信され、第2位置では弱く受信されることがわかっていることを前提にすると、未知の場所にいる無線端末が、その無線(基地)局の信号を弱く受信した場合には、無線端末は、第1位置ではなく第2位置にいる可能性が高い。
(もっと読む)
自動試験システム
【課題】受信機の性能を自動的に正確に評価することができる自動試験システムを提供することを提供すること。
【解決手段】測位信号を受信して測位する受信装置60の自動試験システム10であって、受信装置60に送信する模擬信号を生成する模擬信号生成手段20と、受信装置60が擬似距離を算出し、及び/又は、現在位置を測位するために使用する模擬補助情報を、模擬信号に基づいて生成する模擬補助情報生成手段30と、模擬補助情報を格納する模擬補助情報格納手段50と、模擬補助情報格納手段50に格納された模擬補助情報を読み取って、受信装置60に送信するための模擬補助情報読み取り手段80と、を有する。
(もっと読む)
自動試験システム
【課題】受信機の性能を自動的に正確に評価することができる自動試験システムを提供することを提供すること。
【解決手段】測位用信号を受信する受信装置20の自動試験システム10であって、受信装置20に送信する模擬信号を信号生成シナリオに基づいて生成する模擬信号生成手段と、模擬信号生成手段及び受信装置20を自動テストシナリオに基づいて制御し、かつ、自動試験システム全体の時刻同期を確保する制御手段44と、を有する。
(もっと読む)
衛星測位装置
【課題】ハードウエア規模の増大およびそれに伴う消費電力の増加を軽減することができる衛星測位装置を提供する。
【解決手段】制御部9は、捕捉しているGPS衛星の中から除外対象のGPS衛星を選択し、選択したGPS衛星を捕捉対象から除外して、捕捉しているGPS衛星がない領域に存在するGPS衛星を捕捉するように逆拡散処理部3a,3b,・・・を制御する。
(もっと読む)
WLAN測位システムのアクセスポイントの分類方法及びシステム
【課題】
WLANアクセスポイントの特性推定品質に従ってWLANアクセスポイントを分類する方法およびシステムを提供する。
【解決手段】
WLANアクセスポイントの特性推定品質に従ってWLANアクセスポイントを分類する方法およびシステムを提供する。この分類を使用して基準データベースをスケールし、アクセスポイント特性の期待推定誤差を定量化することができる。WLANアクセスポイントは、WLAN測位システムにおけるユーザの位置、移動速度、および移動方向の推定精度に対するWLANアクセスポイントの影響に基づいて分類される。Wi−Fiアクセスポイントの特性推定品質を割り出す方法は、Wi−Fiアクセスポイントによって送信されるWi−Fi信号のいくつかの受信信号強度(RSS)サンプルをWi−Fi対応スキャン装置で受信し、測定することを含む。そのいくつかのRSSサンプルを測定しているときにWi−Fi対応スキャン装置による総移動距離が推定され、その推定値を用いてWi−Fiアクセスポイントの特性推定品質が推定される。
(もっと読む)
測位装置、測位装置の制御方法及びプログラム
【課題】信号強度が微弱な弱電界下において、測位基礎符号の位相の精度を検証したうえで、精度良く測位することができる測位装置等を提供すること。
【解決手段】測位装置20が発生するレプリカ測位基礎符号と測位基礎符号との相関処理を行って測位基礎符号の位相を算出する位相算出手段と、前回測位時の位相と、測位基礎符号を乗せた電波の周波数のドップラー偏移と、前回測位時からの経過時間に基づいて、現在の位相を予測して予測位相を算出する予測位相算出手段と、測位基礎符号の受信状態に基づいて、位相差許容範囲を決定する位相差許容範囲決定手段と、現在の位相と予測位相との位相差が、位相差許容範囲内か否かを判断する位相差評価手段と、位相差許容範囲内の前記位相差に対応する前記位相を使用して、現在位置を測位する測位手段と、を有する。
(もっと読む)
541 - 560 / 675
[ Back to top ]