
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
581 - 600 / 675
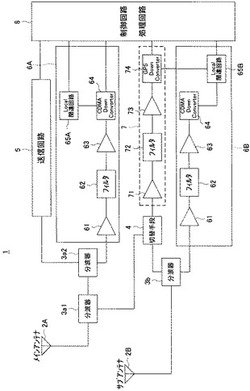
無線通信装置および無線通信装置の無線通信制御方法
【課題】衛星信号をダイバーシチ受信する際のアンテナ切り替えのための構成を簡単にし、処理負担を低減する。
【解決手段】複数のアンテナ2A,2Bと、一のアンテナに接続可能な無線信号の無線信号受信回路6Aまたは6Bと、他のアンテナに接続可能で、衛星からの衛星信号の受信処理を行う衛星信号受信回路7と、無線信号受信回路6A,6Bにて受信処理された無線信号を入力して、この入力信号に応じて信号処理を行う信号処理手段(制御・処理回路8の一機能部)と、衛星信号受信回路7にて受信処理された衛星信号を入力して、この入力信号に応じて信号処理を行う衛星信号処理手段(制御・処理回路8の他の機能部)と、少なくとも1つのアンテナにおいて捕捉される衛星数に応じて、前記衛星信号受信回路7と前記複数のアンテナ2A,2Bとの接続を切り替えるアンテナ接続切替手段4とを備える。
(もっと読む)
通信端末

【課題】GPSにより取得した測位データを選別可能な通信端末を提供する。
【解決手段】測位ポイントPnで測位した後(S25)、前回、取得した有効な測位ポイントPaと、今回測位したPnとの距離差Ldを算出する(S26)。算出した距離差Ldが、移動体の限界移動距離L以下のときに、測位ポイントの測位データを有効と判断し(S27にてYES)、地図上へのロギングをする(S32)。
(もっと読む)
固定式磁気探知装置
【課題】 固定式磁気探知装置では目標が通過した時に生ずる磁気歪み量を元に目標の存在の有無を識別していた。そのため、目標が静止している場合は磁気歪み量が得られず探知が極めて困難であった。
【解決手段】 複数に配置した磁気センサの磁界計測信号の平均値を計算した後、これをフーリエ変換して雑音分布を求め、雑音から外れた代表周波数の逆数で上記複数の隣同士の磁気センサの磁界計測信号の差分を取ることにより電子スキャンして、即ち、等価的に磁気センサを移動させたのと同じ処理をし、地磁気雑音と分離した状態で周囲磁界の空間分布変化を時系列の磁気歪み信号として抽出し、この磁気歪み信号の波形と振幅から目標の有無と位置を特定して探知するようにして探知能力を向上させるとともに、航空機や水中ビークル等の移動体で磁気センサを移動させるという不便をなくして運用性を向上することができる。
(もっと読む)
位置検出システムおよび位置検出方法
【課題】 たとえ測定角度に誤差が含まれていても、その誤差の影響を最小限に抑えて、移動体の位置を的確に検出することが可能な信頼性にすぐれた位置検出システムおよび位置検出方法を提供する。
【解決手段】 3つの光学ビーコンと移動体2とを結ぶ各方向線の相互間の角度を測定し、これら測定角度のうち、それぞれ2つの測定角度からなる複数の組合せを選定する。そして、選定される組合せごとに、それぞれの測定角度および各光学ビーコンの既知の位置を用いて、移動体2の位置を演算する。ただし、上記選定される組合せごとに、その測定角度の変化に対する上記演算位置の変化率を推定し、上記演算に際しては、上記選定される各組合せの測定角度のうち、上記推定される変化率が最小となる組合せの測定角度を用いて、移動体の位置を演算する。
(もっと読む)
測量方法
【課題】GPS測位される測量データを行政上の公的測量データに合致した公的座標値により表示できるようにした測量方法を提供する。
【解決手段】過去に確定された座標に対応する座標値を公的座標値とし、GPS手段によりリアルタイムで測位される座標に対応する座標値を観測座標値とする構成であって、各地点に関して公的座標値と観測座標値を有する位置変動情報を備えた多数の固定基準点に対して、目的地に応じて移動する移動局(6)により目標測量地点(o)をGPS測位する測量方法であり、目標測量地点(o)を囲む固定基準点の位置変動情報を利用することにより、測位された目標測量地点(o)を公的座標値で表す構成である。
(もっと読む)
電離層遅延量推定システム
【課題】GNSSの誤差源である電離層遅延量を広域にわたり高精度に推定するシステムを提供する。
【解決手段】GNSS衛星1から送信されるデータを観測する観測局を地上局2に限らず海上に対しても海上局3を設置し、各地上局2および海上局3では、GNSS信号を受信すると、ジオメトリー・フリー信号および搬送波バイアス推定値を生成し、これらの信号を中央局6に高速通信回線4またはデータ中継衛星5を経由して送信し、中央局6では、これらのデータに基づいて電離層遅延量をリアルタイムで推定し、ユーザUに送信する。
(もっと読む)
移動体のナビゲーション装置及び移動体の現在位置算出方法
【課題】 マルチパスの影響を排除することで、より高い精度で現在位置を検出することが可能な移動体のナビゲーション装置及び移動体の現在位置算出方法を提供する。
【解決手段】 ナビゲーション装置10を備える車両の現在位置算出方法として、車両の現在位置を検出するための自律航法センサ5と制御部17とからなる自律測位手段が新たに算出した自律測位データの誤差範囲を、新たな現在位置の予測エリアデータとして算出するステップと、車両の現在位置を検出するためのGPS受信部4が新たに算出したGPS測位データが、予測エリアデータに含まれるかどうかを判定するステップと、GPS測位データが予測エリアデータに含まれないと判定した場合に、自律測位データを利用して現在位置を示す現在位置データを新たに算出するステップとを有する。
(もっと読む)
位置同定装置、位置同定方法及びプログラム
【課題】通信状態にかかわらず、送信機の位置を正確に取得する。
【解決手段】相関器302は、測定データと記憶部が記憶する電波強度データとの間の最大相関値と最大相関位置データとを、それぞれ、データ数設定部303、メジアンフィルタ304に順次出力する。データ数設定部303は、順次出力された最大相関値の平均値を求めてデータ数を設定する。通信状態が低下した場合は、平均値演算部312の平均値が最も大きくなる。比較判定部305は、平均値演算部312〜314が設定したデータ数の最大相関位置データに基づいてソータのうちからいずれかのものを選択する。通信状態が良好な場合、ソータ切り替え部305は、メジアンフィルタ304のソータ322を選択する。通信状態が低下した場合には、平均値演算部314の平均値が最も大きくなる。この場合、ソータ切り替え部305は、メジアンフィルタ304のソータ322を選択する。
(もっと読む)
測位用衛星信号の受信機および測位用衛星信号の受信方法
【課題】測位用衛星信号についての同期捕捉のサーチが、より迅速かつ正確にできるようになる。
【解決手段】受信側の拡散符号の位相を実質的に変えながら、衛星からの受信信号の拡散符号と受信側の拡散符号との相関を検出して、受信信号の拡散符号の同期捕捉を行う際の、受信側の拡散符号の実質的な位相の変化幅が大きい高速モードと、実質的な位相の変化幅が小さい高感度モードとを備える。高速モードと、高感度モードとの切り換え選択操作を受け付けるためのモード切り換え操作手段を設ける。同期捕捉手段は、モード切り換え操作手段により切り換えられたモードを現在モードとして同期捕捉を実行する。
(もっと読む)
データ送信装置及びデータ送信方法及び測位装置
【課題】 測位に使用する補正データのデータ送信量を低減し、また、送信する補正データの精度を向上させるデータ送信装置の提供を目的とする。
【解決手段】 この発明のデータ送信装置は、電子基準点から電子基準点情報を収集する源泉データ収集処理部102と、収集した電子基準点情報を使用することにより、基準点固有誤差を複数の電子基準点につき計算する第1計算部103と、地域データに複数のグリッド(位置表示点)を設定し、設定した複数のグリッドに対し、電子基準点につき計算した基準点固有誤差に基づき表示点固有誤差データを計算し、複数の表示点固有誤差データを送信対象データとして出力する第2計算部104と、送信対象データに含まれる少なくともいずれかの表示点固有誤差データのデータ形式を変更するデータ形式変更部1042と、データ形式が変更された表示点固有誤差データを含む送信対象データを送信するデータ送信部106とを備えた。
(もっと読む)
タイミングオフセットを有する送信機を用いた位置特定
ワイヤレスネットワーク中で位置場所情報を決定するシステムおよび方法を提供する。1つの実施形態では、タイミングオフセット情報が、複数の送信機と1つの受信機との間で通信される。このような情報によって、ネットワーク全体にわたったタイミング差に対処するように正確な位置または場所の決定を行うことができる。別の実施形態では、受信機における潜在的なタイミング差に対処するために、送信機からの送信を前進または遅延させる送信機位相調整を行う。さらに別の観点では、位置場所決定を容易にするために、タイミングオフセット通信および/または送信機位相調整の組み合わせをワイヤレスネットワークにおいて使用することができる。 (もっと読む)
L1/L5バイアス推定を有する広域補強システムのための方法及び装置
広域補強システム(WAAS)は、L1/L5バイアス推定を含む。L1電離層遅延及びL1電離層遅延レートの推定値を受信し、GEO勾配電離層遅延を受信し、GEO衛星のユーザ電離層垂直誤差情報を受信し、L1電離層遅延及びL1電離層遅延レートの推定値並びにGEO勾配電離層遅延からL1/L5バイアス推定値を計算する。 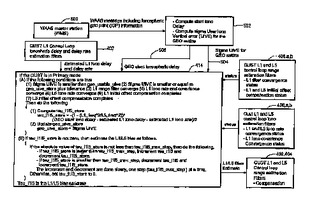 (もっと読む)
(もっと読む)
位置検出システムおよびその方法
【課題】GPS機能を有する端末を利用する位置検出システムおよびその方法。
【解決手段】位置検出システム10は、自身の情報を示すポストデータを発信する複数の位置ポスト18、20、22、24および26を配置して、被保護者端末14が、GPS機能により自身の位置データを得て、付近の位置ポストからポストデータを受信して、位置データおよびポストデータに基づく端末データをサーバ28に通知することにより、位置データを得られない場合でも、サーバ28が、ポストデータに基づいて端末14の位置を検出することができる。したがって、位置ポストをGPS電波の届きにくい場所に配置して、より効果的に端末14の位置を検出することができる。
(もっと読む)
位相調整された送信器を用いる位置特定
無線ネットワーク内の位置情報を決定するためのシステムおよび方法が提供される。一実施形態では、タイミングオフセット情報が多数の送信器と1台以上の受信器との間でやり取りされる。この情報により、ネットワーク全域のタイミングの差を補正するための正確な位置または場所の測定が可能となる。別の実施形態では、受信器側で起こり得るタイミングの差を補正する目的で、送信器からの伝送を早遅させるため送信器の位相調整が実施される。さらに別の実施形態では、タイミングオフセット通信の組み合わせおよび/または送信器の位相調整が、位置測定を容易にするため無線ネットワーク内で用いられることが可能である。SDRAM 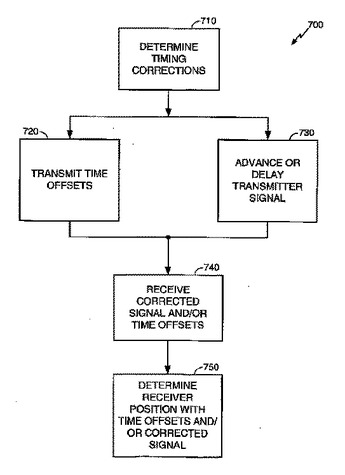 (もっと読む)
(もっと読む)
鉄塔材変位計測方法および鉄塔材変位計測装置
【課題】 鉄塔構造物を構成する鉄塔材の変位計測を簡易に行うことができ、作業者の能力差による計測精度のばらつきを無くすと共に僅かな変位をも正確に測量することが可能な鉄塔材変位計測技術を提供する。
【解決手段】 発信時刻データを含む電波を発振するボルト頂部取付用計測器2を鉄塔構造物を構成する鉄塔材のうち測定したい鉄塔材のボルト頂部に取付け、GPS信号を受信して自身の位置データを取得すると共にボルト頂部取付用計測器2から発信された電波を受信して発信時刻データと電波の受信時刻データとを位置データと共に発信する地上設置装置3を鉄塔構造物の中心線上およびそれ以外の任意の3箇所以上の箇所に配置する。少なくとも地上設置装置3から発信されたデータに基づき、ボルト頂部取付用計測器2の設置箇所情報を演算して設計値と比較し、ボルト頂部取付用計測器2が取り付けられた設置箇所の変位情報を含む比較結果を表示させる。
(もっと読む)
GPS位置決定を判定する方法およびそのGPSレシーバ
GPS位置決定を判定する方法が提供され、方法は、(i)受信したGPS信号をサンプリングし、これらサンプルを記憶するステップと、(ii)これらGPS信号サンプルの予備処理を行い、後のこれらGPS信号サンプルの最終的な処理の間に、位置決定を得ることができる可能性を判定するステップと、(iii)ステップ(ii)の後に、これらGPS信号サンプルの最終的な処理を行い、位置決定を得るステップと、を備える。  (もっと読む)
(もっと読む)
鉄塔基礎工事用計測装置及びこれを用いた計測方法
【課題】 鉄塔基礎工事での計測を簡易に行うことができ、また、作業者の能力差による計測精度のばらつきを無くし、作業中の基礎材の変位をも容易に確認できる鉄塔基礎工事用計測技術を提供する。
【解決手段】 鉄塔構造物の基礎材1に着脱自在に取り付け可能であり、発信時刻データを含む電波を発振すると共に傾斜角度に関するデータを発信する基礎材取付用計測器2と、鉄塔の中心線上およびそれ以外の任意の3箇所以上の箇所に設置され、前記電波を受信して電波の発信時刻データと受信時刻データとを自身の位置データと共に発信する地上設置装置3と、発信された各種データに基づき、基礎材取付用計測器2を設置する部材の定点位置情報を演算し、この演算された定点位置情報を設計値と比較して修正情報を含む比較結果を演算し表示する計測結果表示装置4とを備える。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法および装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法およびカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
無線基地局に関する動的位置アルマナック
【課題】無線基地局に関する動的位置アルマナック
【解決手段】エンドユーザーによって制御される無線電話によって基地局のアルマナックを動的に更新するシステム及び方法。第1、第2、及び第3の位置情報が、第1、第2、及び第3の無線電話からそれぞれ受信される。各無線デバイスの位置が知られる。不確実性係数を考慮しつつ各無線デバイスと非協力基地局との間の距離が決定される。前記非協力基地局の位置が、前記第1、第2、及び第3の位置情報及び前記距離を用いて計算される。前記アルマナックは、前記位置を用いて更新される。
(もっと読む)
既知の外部信号を用いて通信システム内の位置検出ユニットを同期化する時刻同期化システム及び方法
【課題】専用回線、ネットワーク、または高価なGPSレシーバを用いずに、位置検出ユニットのローカルクロックを同期させる時刻同期システムを提供。
【解決手段】位置検出ユニット120a,bのそれぞれは、既知の地理的な場所に位置する送信機110から高周波(RF)信号115を受信してRF信号を計測し、受信したRF信号の個々の計測値と、位置検出ユニットのローカルクロックのそれぞれと実質的に同一時刻において記録された、計測値の個々のタイムスタンプとを生成する。コントローラ150は、タイムスタンプ及び計測値を使用して位置検出ユニット間の実測TDOAを判定し、実測TDOAと予測TDOA間の差から位置検出ユニット間の時刻同期誤差を演算し、位置検出ユニットのそれぞれに対して個々の時刻調節値を供給して時刻同期誤差をオフセットする。
(もっと読む)
581 - 600 / 675
[ Back to top ]