
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
521 - 540 / 675
ダムの外部変形評価方法

【課題】地震発生の後、短時間でダムの外部変形度合いを高精度に評価できるようにした、ダムの外部変形評価方法を作成することが課題である。
【解決手段】ダムに設置された複数のGPS受信装置を用いてリアルタイムに外部変形度合いを計測し、得られた時系列計測データからCPUによりダムの変位データを算出して記憶手段に記憶すると共に、該変位データにフィルタ処理・平滑処理を行なった処理済み変位データを算出して記憶手段に記憶するようにしたダムの外部変形具合の評価方法において、地震発生信号により地震前に算出したダムの変位データにおける標準偏差σと地震後におけるダムの変位データの平均値xとを算出し、該平均値xと地震前の標準偏差σとを用い、前記CPUでZ推定により変位を算出するようにした。
(もっと読む)
車載用ナビゲーション装置及びその制御方法

【課題】GPS受信手段を二系統用いる簡明な手法で自車位置判定の精度を効果的に向上させるカーナビゲーションの技術を提供すること。
【解決手段】切替手段88は、2つのGPS受信機による測位精度が所定基準以上に良好で、かつ、第1の自車位置情報と第2の自車位置情報の位置同士が所定範囲内に近接し、かつ、この所定範囲内に道路情報(例えば道路リンク)が存在しない場合に、マップマッチングの結果に代えて、第1の自車位置情報と第2の自車位置情報の平均値(位置及び方位)を算出して自車位置として採用する(切替処理)。
(もっと読む)
衛星信号判定装置
【課題】衛星航法システムにおいて、それぞれ同一の情報を含む2周波の信号が同一衛星から同時に出力される場合に、当該2周波の信号がどの衛星から発せられたかの判定を、正確、簡易に、かつ効率よく行うようにする。
【解決手段】 各チャンネルにおいて、次のような処理を行う。受信装置6では、L1信号のPNコードと所望する衛星のPNコードとの相関値を計算し、当該相関値のピークが第1閾値を越えたか否かによりL1信号が所望する衛星のものであるか否かを判定する。所望する衛星のものと判定したときは、L1信号判定部11では、所望する衛星の所望する以外の衛星のキャリア周波数の比較及び信号レベルの比較により、L1信号が所望する衛星のものか否か判定する。この判定を前提として、L2信号判定部12では、受信信号の送信時刻によりL2信号が所望する衛星のものか否か判定する。
(もっと読む)
位置検出サービス品質インディケータ
移動体ワイヤレス・デバイスは、位置検出に基づくサービスによって用いるために、計算した位置検出推定値の品質を示す位置検出サービス品質インディケータ(QoSI)を供給するように構成されている。QoSIは、デバイス自体によって、または位置検出対応サーバ(LES)のようなサーバによって計算することができる。QoSIは、予測位置検出精度、可用性、レイテンシ、精密度、および/または歩留まりを表すために用いることができる。 (もっと読む)
統合型移動端末ナビゲーション
セルラ通信ネットワークの1以上の同期していない地上送信源102〜105からの信号を受信するための送信源受信機204と、衛星測位システムの衛星107〜110からの信号を受信するための衛星測位受信機200とを備えた移動端末100を含むナビゲーションシステムが提供される。端末100はクロック208も含む。プロセッサ209は、各値が受信機200、204によって生成された測定値を表している斯かる値のリストと、端末クロックのバイアスとを有する測定値ベクトルを取得する働きをする。プロセッサ209は、動的ナビゲーションソリューションを得るために、システムの現状態を表す状態ベクトルを、以前に決定された状態ベクトルと、測定値ベクトルと、動的モデルとを使って計算する。状態ベクトルは、その成分として少なくとも、(a)端末100の1次元以上の位置情報と、(b)同期していない地上送信源102〜105に付随するクロックの所与の時間に関するバイアスの表現と、(c)端末クロック208のバイアスと、(d)(a)乃至(c)の成分に関連する誤差を示すクォリティ指標と、(e)(a)乃至(c)の成分の他の成分に対する依存度を示す相関指標とを含む。 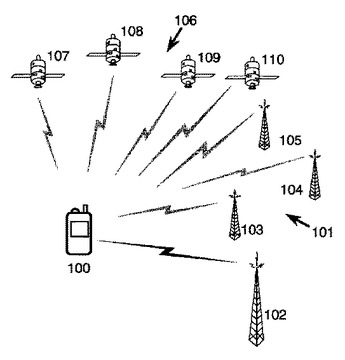 (もっと読む)
(もっと読む)
ナビゲーション装置、ナビゲーション制御方法及びナビゲーション制御プログラム
【課題】本発明は、衛星からの信号を受信できないときであっても、信頼性の高い高精度な移動体の現在位置を提示できるようにする。
【解決手段】本発明は、衛星からの信号を受信していたときに予め学習しておいた加速度センサの移動体に対する取付角度の学習程度が高ければ、その学習結果を用いた推定した自律速度の信頼性が高いと考え、その自律速度をナビゲーション動作に用い、学習程度が低ければ自律速度の信頼性が低いと考え、その自律速度を用いるのではなく、衛星からの受信情報に基づいて算出された移動体の走行速度をナビゲーション動作に用いるように切り換えることができるので、ナビゲーション動作の信頼性を一段と向上させることができる。
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
ナビゲーション装置、ナビゲーション情報算出方法及びナビゲーション情報算出プログラム
【課題】本発明は、車両に対する加速度センサの取付角度を高精度に予め算出し得、衛星からの信号を受信できないときでも、車両の速度及び現在位置を高精度に算出できるようにする。
【解決手段】本発明は、車両の速度に応じて進行方向加速度αxを算出し、車両の速度及び方位に応じて横方向加速度αyを算出し、車両の運動化速度α及び重力加速度gを観測し、気圧値PRに応じて算出した路面の高度差ΔHと車両の速度Vに応じた進行距離Lmとに基づいて路面の進行方向に対する傾斜角度θを算出し、進行方向加速度αx、横方向加速度αy、実際の進行方向加速度及び横方向加速度の観測値AD、傾斜角度θにより表される多次元の関数式fx、fy、fzに基づいて、加速度センサ5の車両に対する取付角度を求める。
(もっと読む)
測位機能を備えた携帯端末
【課題】タイマの有効性を維持した上で、測位サーバとの間が通信不可能な場合にはいち早く自律測位モードに遷移させる。
【解決手段】携帯端末MS1〜MSnに測位モード変更制御機能133を設ける。そして、このモード変更制御機能133により、アシスト測位モードにおいて測位サーバSV2から補助情報を取得する際に、タイマ20の計時期間中にプロキシサーバSV1との間の接続に成功したか否かを判定し、接続に失敗したと判定した場合にはその時点でタイマ20の計時動作を強制終了して測位モードをアシスト測位モードから自律測位モードに変更する。また、測位サーバSV2との間の接続に成功した場合でも、当該測位サーバSV2から返送された情報が送信不可メッセージだった場合には、その時点でタイマ20の計時動作を強制終了して測位モードをアシスト測位モードから自律測位モードに変更する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】従来技術に比較して正確にマルチパス判定処理を行い、高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マルチパス判定楕円算出器23と、位置及び速度算出器22とを備える。マルチパス判定楕円算出器23は、現在位置とナビゲーション装置10の進行方向とに基づいてマルチパス判定楕円を算出する。位置及び速度算出器22は、受信無線信号のGPS衛星からナビゲーション装置までの伝搬距離とマルチパス判定楕円とに基づいて、受信無線信号がマルチパス合成信号であるか否かを判定するマルチパス判定処理を実行し、マルチパス合成信号でないと判定されたGPS衛星からの受信信号に基づいて自車位置を算出する。
(もっと読む)
移動通信端末、GPS測位方法、測位演算システム及び測位サーバ
【課題】GPS測位に要する待機時間を短縮できる。
【解決手段】GPS衛星G1からの測位信号を受信可能なGPS受信部3を有し、GPS測位によって所在の特定が可能な移動通信端末1において、GPS受信部3によって受信された測位信号に基づいてGPS衛星を捕捉するGPS衛星捕捉部5と、GPS衛星捕捉部5によって捕捉されたGPS衛星の捕捉数を計測する捕捉数計測部6と、捕捉数計測部6によって計測された捕捉数に基づいてGPS測位中止条件を満たすか否かの判定を行うGPS測位中止判定部7と、GPS測位中止判定部7によってGPS測位中止条件を満たすと判定されたときにはGPS測位を中止させ、GPS測位中止判定部7によってGPS測位中止条件を満たさないと判定されたときにはGPS測位を継続させるGPS測位制御部8と、を備えることを特徴とする。
(もっと読む)
ハイブリッド位置判断システムにおける誤差推定値を判断するための方法および装置
【課題】マルチパシングによって生じる誤差を判断し、誤差推定を向上する。
【解決手段】データベースを設定し、その中に、ビーコンに対する特定の疑似範囲の測定値に対して推定された誤差量を維持する。クラスタを定める。各クラスタは、選択したパラメータに対する値の範囲と関係付けられている。次に、疑似範囲の測定値は、疑似範囲の測定値をとった時間に(または、その時間の前後を含む時間)おける選択したパラメータ値に基づいて、特定のクラスタと関係付ける。求めた疑似範囲の測定値の推定値の数がより多くなると、クラスタのサイズ(すなわち、選択したパラメータ値の範囲)を小さくすることができる。選択したパラメータと疑似範囲の測定値における誤差との相関によって、クラスタのサイズが小さくなると、誤差推定値の分散が小さくなる。誤差推定値の平均値を使用して、将来の疑似範囲の測定値の誤差を補正する。
(もっと読む)
搬送波位相式測位装置
【課題】測位側が移動している場合であっても高精度な測位を実現できる搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で衛星信号を受信して取得する衛星データに基づいて移動局の位置を測位する搬送波位相式測位装置34であって、移動局30及び既知点20で受信した衛星信号の搬送波位相の積算値の1重又は2重位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアスの1重又は2重位相差とを状態変数とするシステムモデルに、移動局の移動履歴から該移動局の現時刻の状態を予測する移動体モデルを導入して、複数エポックでの衛星データに基づいて前記状態変数を推定して測位を行う。
(もっと読む)
全視野のコヒーレントなGPS信号擬似ランダム雑音(PRN)コード捕捉及びナビゲーション解決定のための全地球測位システム(GPS)ユーザ受信機および幾何学的表面処理
GPS装置のより強固な検出、捕捉、位置決め解能力を可能にする方法およびシステムである。システムおよび方法はGPSユーザ受信機の位置を予測するために、一度に一つのGPS信号の捕捉ではなく、同時的な全視野のコヒーレントなPRNコード信号処理方式に基づいたGPS衛星距離信号を使用する。さらに、画像処理技術、超密着結合処理技術、またはその組合せはさらにユーザ受信機の位置決定の正確性を強化するために使用される。信号処理技術はGPS衛星距離信号が個別に検出されることができないとき、或いは1または2のみの強いGPS衛星距離信号が弱い信号環境、混雑状態、その組合せにおいて個別に検出されることができるときGPSユーザ受信機の位置を決定するために使用される。 (もっと読む)
搬送波位相式測位装置
【課題】サイクルスリップが発生した場合であっても、整数値バイアスの確定処理を一からやり直す必要の無い搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で測定される衛星信号の搬送波位相の積算値又はその位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアス又はその位相差とを状態変数とし、複数の観測周期での衛星データに基づいて前記状態変数を推定して移動局の測位を行う搬送波位相式測位装置であって、位相積算値のサイクルスリップの有無を検出するサイクルスリップ検出手段を備え、サイクルスリップが検出された場合は、サイクルスリップの検出された衛星に係る状態変数だけを初期化して測位を継続する。
(もっと読む)
セル共通部分からのセルIDベースのポジショニング
ワイヤレスデバイスによって、検出された信号の信号強度を使用して、ワイヤレスデバイスのロケーションを決定するシステムと方法を説明する。一般的に、既知のロケーションにおいて集められた、または推定された基準信号強度測定値に対して、識別可能なソースから受信した信号の強度を比較する。信号のソースを識別する情報は、一般的に、信号中に提供されるデータから取得される。その中でワイヤレスデバイスが見つけられる領域を位置特定するためのインデックスとして、信号強度測定値を使用できるように、マッパーが、基準信号強度の組み合わせを、幾何学的に形成された地理的領域に関係付けする。既知のロケーションから信号強度情報を受信するシステムと方法を説明し、情報を使用して、マッピングシステムデータベースを更新して、改善することができる。 (もっと読む)
ハイブリッド位置判断システムにおける誤差推定値を判断するための方法および装置
【課題】マルチパシングによって生じる誤差を判断し、位置判断測定の誤差推定を向上する。
【解決手段】データベースを設定し、その中に、ビーコンに対する特定の疑似範囲の測定値に対して推定された誤差量を維持する。クラスタを定める。各クラスタは、選択したパラメータに対する値の範囲と関係付けられている。次に、疑似範囲の測定値は、疑似範囲の測定値をとった時間(または、その時間の前後を含む時間)における選択したパラメータ値に基づいて、特定のクラスタと関係付ける。求めた疑似範囲の測定値の推定値の数がより多くなると、クラスタのサイズ(すなわち、選択したパラメータ値の範囲)を小さくすることができる。選択したパラメータと疑似範囲の測定値における誤差との相関によって、クラスタのサイズが小さくなると、誤差推定値の分散が小さくなる。誤差推定値の平均値を使用して、将来の疑似範囲の測定値の誤差を補正する。
(もっと読む)
ハイブリッド位置判断システムにおける誤差推定値を判断するための方法および装置
【課題】マルチパシングによって生じる誤差を判断し、位置判断測定の誤差推定を向上する。
【解決手段】データベースを設定し、その中に、ビーコンに対する特定の疑似範囲の測定値に対して推定された誤差量を維持する。クラスタを定める。各クラスタは、選択したパラメータに対する値の範囲と関係付けられている。次に、疑似範囲の測定値は、疑似範囲の測定値をとった時間(または、その時間の前後を含む時間)における選択したパラメータ値に基づいて、特定のクラスタと関係付ける。求めた疑似範囲の測定値の推定値の数がより多くなると、クラスタのサイズ(すなわち、選択したパラメータ値の範囲)を小さくすることができる。選択したパラメータと疑似範囲の測定値における誤差との相関によって、クラスタのサイズが小さくなると、誤差推定値の分散が小さくなる。誤差推定値の平均値を使用して、将来の疑似範囲の測定値の誤差を補正する。
(もっと読む)
低高度地球軌道衛星2機を用いた受動的位置決定
【課題】低高度地球軌道衛星2機を用いた受動的位置決定法を提供する。
【解決手段】ユーザー端末と、既知の位置と既知の速度とを有する少なくとも二つの衛星と、衛星を介してユーザー端末と通信するためのゲートウェイ(すなわち地上基地局)とを含む。方法は、範囲差パラメタと範囲レート差パラメタとを決定する工程を含む。範囲差パラメタは(1)衛星のうち最初のものとユーザー端末との間の距離と(2)衛星のうち2番目のものとユーザー端末との間の距離との差を表す。範囲レート差パラメタは、(a)衛星のうち最初のものとユーザー端末との間の相対半径方向速度と(b)衛星のうち2番目のものとユーザー端末との間の相対半径方向速度との差を表す。地球表面上でのユーザー端末の位置を衛星の既知位置と既知速度と、範囲差パラメタと、範囲レート差パラメタに基づいて決定する。
(もっと読む)
測位装置、ナビゲーションシステム
【課題】GPS衛星が捕捉困難な状態であっても、従来の地図データを使用して、精度よく測位することができる測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段81により移動体の位置を検出する測位装置9において、移動体の挙動情報を検出する第1及び第2の自律センサ2、4、3と、測位結果に第1の自律センサによる検出情報を累積して推定位置及び推定方向を検出する位置検出手段82と、推定位置に基づき地図データ記憶手段5を参照し対応するリンクから所定距離の地図データ推定位置を検出する地図データ測位手段83と、測位結果に第2の自律センサによる検出情報を累積して累積推定方向を検出する方向検出手段84と、推定位置及び地図データ推定位置並びに推定方向及び累積推定方向をカルマンフィルタに適用して移動体の位置を推定する最尤位置推定手段85と、を有することを特徴とする。
(もっと読む)
521 - 540 / 675
[ Back to top ]