
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
501 - 520 / 675
センサ誤差推定装置及び観測装置及び方法及びプログラム
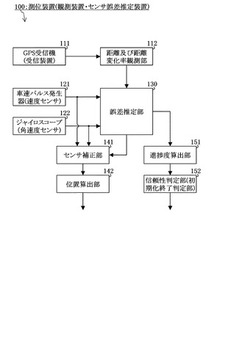
【課題】計測誤差を推定し、推定した計測誤差で計測量を補正する観測装置において、誤差推定の進捗度を正しく見積もる。
【解決手段】誤差推定部130は、距離及び距離変化率観測部112が観測した擬似距離などに基づいて、車速パルス発生器121・ジャイロスコープ122などが計測した速度・角速度などの計測誤差を推定し、推定した計測誤差の推定誤差を算出する。進捗度算出部151は、誤差推定部130が算出した推定誤差に基づいて、誤差推定の進捗度を算出する。
(もっと読む)
位置検出装置、位置検出方法、データ判定装置、データ判定方法、コンピュータプログラム及び記憶媒体

【課題】検出精度の悪さによって真の値から大きく振れた大きな誤差を含む位置情報を誤りと判定することができる位置検出装置、位置検出方法、コンピュータプログラム及び記録媒体を提供する。
【解決手段】位置検出装置としての携帯電話機の制御部は、判定の対象となる注目位置情報Pi と共に時系列に前後する位置情報Pi-1,Pi+1を読み出し(S103)、Pi-1,からPi への変化とPi からPi+1への変化を夫々示す例えばベクトルV1 ,V2 を算出する(S104,S105)ことによって変化傾向の変動の大きさを算出する。変化傾向の変動は算出したベクトルV1 ,V2 の内積(ドット積)の値で表し(S106)、内積の値が所定値より低い場合は(S107:YES)、注目位置情報Pi の前後で位置が大きく振れることを示しているので変化傾向の変動が大きいと判断することができ、誤りと判定する(S108)。
(もっと読む)
測位点推定装置および測位点推定方法ならびにそのプログラムと記録媒体
【課題】ある測位点における現在および未来および過去の位置情報を正確に、また容易に推定することのできる、測位点推定装置を提供する。
【解決手段】IGS点の座標を用いて基線解析によって求めた電子基準点の座標を化成し、また異なる算出時点の間隔単位あたりの電子基準点の移動速度を算出する。そして、ある算出時点に算出された複数の異なる電子基準点の電子基準点化成値とその電子基準点化成値が示す座標について算出された前記移動速度との組み合わせの情報を用いて、複数の異なる電子基準点ごとの同一時点における補正後の電子基準点化成値を算出する。また、複数の異なる電子基準点ごとの同一時点における補正後の電子基準点化成値とそれら各電子基準点における移動速度と、IGS点の座標およびその座標における移動速度とを用いて四次元統合網平均計算式により高精度な座標の推定値と新たな移動速度とを算出する。
(もっと読む)
RF放出体の可搬型反復地理的位置検出
TDOAの使用による静止RF放出体の反復地理的位置検出は、1つの可搬型地理的位置検出(例えば、TDOA)センサ、1対の可搬型地理的位置検出センサ、および3つ以上の可搬型地理的位置検出センサの使用を含むことができる。可搬型地理的位置検出センサを反復プロセスに追加することによって、位置検出対象の信号に対する制約が減少し、位置検出精度向上を得るために必要な反復回数も削減する。 (もっと読む)
ナビゲーションシステム、およびGPS測位解精度判定方法
【課題】マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知する。
【解決手段】複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段と、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断するナビゲーションシステムを提供する。
(もっと読む)
測位回路、電子機器、測位方法及びプログラム
【課題】 二次元測位で用いられる高度データを改良して、データ量の削減や検索速度の向上を図ること。
【解決手段】 GPS衛星信号に基づく測位演算は、先ず三次元測位が行われ、三次元測位が失敗すると、高度テーブルを検索して得られた高度に基づく二次元測位が行われる。高度テーブルは、地形に設定した複数の地域50それぞれに高度を定義したデータテーブルであり、「100m」といった高度が定義された高度有りテーブルと、高度が定義されない高度無しテーブルとがある。地域50はその大きさが任意に設定可能な矩形形状であるとともに、複数の地域50の重畳(重ね合わせ)が許容されている。また、高度テーブルそれぞれには定義されている高度の高い順に優先順がつけられ、この優先順に従って格納されている。そして、高度テーブルの検索は、格納順即ち定義されている高度が高い順に行われる。
(もっと読む)
LOSリンク予測および測定前LOS経路フィルタリングを用いた三辺測量のための方法および装置
三辺測量のための方法は、複数のLOS経路の各々を経由して信号を受信するステップと、各LOS経路の性能を予測するステップとを含み得る。この方法はまた、性能が所定の閾値に満たない、LOS経路経由で受信した信号をフィルタリングによって除去するステップを含み得る。この方法はさらに、装置の位置を実質的に決定するために、フィルタリングされていない信号を用いて三辺測量を行なうステップを含み得る。 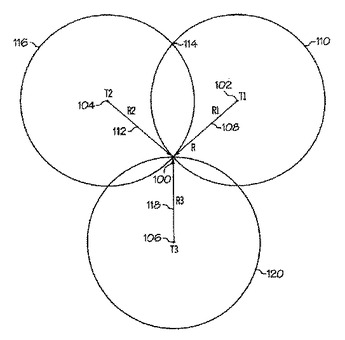 (もっと読む)
(もっと読む)
計測装置及びマルチパス判定方法及び計測方法
【課題】受信したGPS信号などがマルチパスであるか否かを正確に判定することにより、位置などの計測精度を高める。
【解決手段】受信装置111がGPS信号(電波)を受信する(S11)。擬似距離計測部112がGPS信号に基づいて擬似距離を算出し、擬似距離差算出部113が擬似距離の変化量(擬似距離差)を算出する(S12〜S14)。位相距離差計測部114がGPS信号に基づいて位相距離の変化量(位相距離差)を算出する(S15〜S16)。マルチパス判断部115が、擬似距離差と位相距離差とを比較して、受信装置111が受信したGPS信号がマルチパスであるか否かを判断する(S17)。位置算出部130は、マルチパス判断部115がマルチパスであると判断した擬似距離を棄却し、それ以外の擬似距離に基づいて、現在位置を算出する(S18)。
(もっと読む)
通信装置の位置を求めるための方法および装置
通信装置の位置を求める方法は、受信機で受信した各パルスの到着時間を測定するステップを含んでもよい。この方法はまた、受信した各パルスと、送信機および受信機間の送信経路との、予想される1組の仮定の組合せを生成するステップを含んでもよい。位置を求めようとしているこの通信装置は、送信機および受信機のうち一方である。この方法はさらに、1組の仮定の組合せを用いて、通信装置の位置を推定するステップを含んでもよい。  (もっと読む)
(もっと読む)
移動体位置測位装置
【課題】マルチパス発生中におけるマルチパス終了判定の誤判定を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星10からの信号を受信する受信手段20Aと、移動体の速度ベクトルVを算出する速度ベクトル算出手段60Aと、移動体の位置を測位する測位演算手段40と、測位結果の履歴に基づいて移動体の移動量を表す変位ベクトルMを算出する変位ベクトル算出手段50と、速度ベクトルVと変位ベクトルMとのなす角度を評価値として算出する角度算出手段と、評価値に基づいて測位演算手段の測位の異常を判定する異常判定手段72とを備え、異常判定手段72は、前記評価値が所定閾値Th1以上となった場合に、測位に異常がある旨の異常判定をし、該異常判定時から前記評価値が所定閾値Th3未満となる間の時間又は移動体の移動距離が、所定時間Th5又は所定距離を越えた場合には、前記異常判定を解除し、所定時間又は所定距離を越えない場合には、前記異常判定を維持することを特徴とする。
(もっと読む)
アレイアンテナ装置
【課題】アレイアンテナで観測した電波の到来する方位と仰角から推定した送信位置に含まれる誤差の低減を図る。
【解決手段】演算処理部15は、アンテナ11a〜11nで受信した到来電波に輻輳した複数の信号から所望の信号を分離するとともに、各アンテナ11a〜11nにおける所望の信号の位相差情報を用いて到来電波の受信方位および仰角を算出し、この算出した受信方位および仰角と、電離層の任意の位置における電子密度を求めるための電離層電子密度分布モデルを用いて推定される電離層の電子密度分布とを用いて、到来電波の伝搬経路を算出して到来電波の送信位置を算出するとともに、この送信位置の幾何学的方位を算出し、到来電波の送信位置における送信仰角を推定する。
(もっと読む)
電離層電子密度算出装置
【課題】電離層の状態に即して、電離層中の所望の位置における電子密度を算出することができる電離層電子密度算出装置を提供する。
【解決手段】衛星観測部1は衛星信号を観測し、衛星信号の通過経路における総電子数(TEC)を、観測した衛星信号から求める。演算部42は、衛星観測部1で算出した衛星信号の通過経路における総電子数と、電離層電子密度分布モデルから求めた衛星信号の通過経路における総電子数との差分を算出し、この差分を用いて、電子密度の値を修正するための係数αを算出し、電離層電子密度分布モデルを用いて算出した所望の位置の電子密度に係数αを乗算して修正電子密度を算出する。
(もっと読む)
測位用データ生成装置、受信装置、プログラム、測位システム、及び測位方法
【課題】GPS測位における複数の受信装置と測位装置との間の通信データ量を削減する。
【解決手段】測位用データ生成装置は、GPS受信機から出力される観測データに含まれる、衛星からの電波の受信時間と、衛星を識別する衛星IDと、電波の搬送波位相の小数部とを抽出し、抽出された受信時間、衛星ID、及び搬送波位相の小数部を含んで構成される測位用データを生成する測位用データ生成部と、測位用データ生成部によって生成された測位用データを、受信時間、衛星ID、及び搬送波位相の小数部に基づいて複数のGPS受信機間の相対位置関係を測定可能な測位装置に、無線通信装置を介して送信する測位用データ送信部と、を備える。
(もっと読む)
電離層電子密度算出装置
【課題】電離層の状態に即して、電離層中の所望の位置における電子密度を算出することができる電離層電子密度算出装置を提供する。
【解決手段】放送信号をアレイアンテナ41で受信すると、演算部45は、受信信号から求めた到来方位角、到来仰角と、電離層電子密度分布モデルにより算出した放送信号の伝搬経路から求めた到来方位角、到来仰角との誤差を求める。衛星観測部1は観測した衛星信号からその通過経路における総電子数を求める。演算部45は、衛星観測部1で求めた衛星信号の通過経路の総電子数と、電離層電子密度分布モデルから求めた衛星信号の通過経路における総電子数との誤差を求める。演算部45は、電離層電子密度分布モデルに入力するパラメータを、初期値からモンテカルロ法的な手法により修正し、逐次誤差指標を算出し、誤差指標が所定の閾値以下になった際のパラメータを用い、所望の位置の電子密度を算出する。
(もっと読む)
擬似距離測定の十分性を決定するためのシステムおよび/または方法
ここに示された主題は、システム、および配置位置のための測定値の十分性を決定する方法に関する。1つの例において、請求された主題はそのように制限されていないが、擬似距離測定値の精度を改善するプロセスは、少なくともそのような擬似距離測定値のうちのいくつかの定量的評価の重み付けに応じて終了するかもしれない。  (もっと読む)
(もっと読む)
軟弱水中地盤上の盛土の監視方法および装置
【課題】水中の軟弱地盤上に造成している盛土の安定性を容易に精度よく把握できるようにした軟弱水中地盤上の盛土の監視方法および装置を提供する。
【解決手段】軟弱水中地盤11上に造成している盛土10の頂部の沈下量Sを測定するとともに、盛土10の水中の法尻部に配置した検知指標体6をGPS受信機を備えた作業船2からナローマルチビーム測探機3により検知して盛土10の法尻部の水平方向変位量Hを測定し、測定した頂部の沈下量Sおよび法尻部の水平方向変位量Hに基づいて制御装置によって盛土10の安定性を判断するデータを演算して、予め入力してある基準データと対比する。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
測位装置、カーナビゲーション装置及び測位方法
【課題】簡易に正確な受信機の位置を検出することが可能な「測位装置」、「カーナビゲーション装置」及び「測位方法」を提供する。
【解決手段】制御部102は、GPS受信機50によって受信される信号の送信元のGPS衛星を4個ずつ組み合わせた場合における全ての組み合わせ毎に、当該組み合わせに属する4個のGPS衛星からの信号に対応するGPS情報に基づいて、車両位置を検出し、これら組み合わせ毎に検出された車両位置に基づいて、マルチパスが発生しているGPS衛星を特定し、そのGPS衛星以外のGPS衛星からの信号に対応するGPSに基づいて、車両位置を検出する。
(もっと読む)
位置情報取得装置、位置情報取得方法、および、端末装置用プログラム
【課題】帯域内ノイズの影響を軽減して測位解の精度改善を実現する。
【解決手段】第一の条件を満たす信号をGPS信号として捕捉・追尾する信号捕捉追尾手段と、該捕捉・追尾された追尾信号を用いて測位を行い、該移動体の位置情報を算出する位置情報算出手段と、該算出された位置情報に基づいて該移動体が所定の場所に位置するか否かを判定する移動体位置判定手段と、移動体位置判定手段により該所定の場所に位置すると判定されるときに、GPS信号を捕捉・追尾するための条件を該第一の条件と異なる第二の条件に変更する捕捉追尾条件変更手段とを具備し、信号捕捉追尾手段が、移動体位置判定手段により該所定の場所に位置すると判定されている期間中、該第二の条件に基づいて信号捕捉・追尾を行う位置情報取得装置を提供する。
(もっと読む)
絶対位置算出装置、及びその絶対位置算出方法
【課題】
GPSを用いた測位手段において、従来よりも、精度を向上させた絶対位置の算出、位置計測のを行うことを課題とする。
【解決手段】
3台のGPS受信機とアンテナを用いて、絶対位置の算出、位置計測するものとする。
先ず、3台のGPS受信機を用いて、それぞれの計測地点で、GPS衛星からのデータを取得する。
そして、3台のうちで、予め定めた2台の計測地点間の距離を拘束条件としフィルタリング処理を行い、絶対位置の算出を行うものととする。
上述の絶対位置の算出、位置計測を行うことによって、従来よりも精度を向上させた絶対位置の算出、位置計測を可能とするものである。また、計測時間の短縮化を図ることも可能とするものである。
(もっと読む)
501 - 520 / 675
[ Back to top ]