
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
421 - 440 / 675
測位方法
【課題】マルチパスの誤検出および未検出を低減しマルチパスの影響を受けない高精度な位置を表示する。
【解決手段】測位衛星が発信する軌道情報および時刻情報を受信するステップ(201)と、受信した時刻情報をもとに測位衛星と受信機との間の擬似距離を算出するステップ(206,207)と、受信した軌道情報および時刻情報をもとに前記測位衛星の位置を算出するステップと、算出された擬似距離および測位衛星の衛星位置をもとに受信機の現在位置を算出するステップと、受信機の予測位置を算出するステップと、受信機の予測位置および測位衛星の衛星位置をもとに擬似距離の予測量を算出するステップと、前記擬似距離と擬似距離の予測量の差分をもとに擬似距離の予測観測誤差を算出するステップ(208)と、前記予測観測誤差を予測観測誤差の標準偏差で除算した結果をもとにマルチパスの発生の有無を判断するステップ(209,210)を備えた。
(もっと読む)
測位方法、プログラム及び測位装置

【課題】2種類の測位処理を適切に切り替えて測位結果の精度向上を図ること。
【解決手段】携帯型電話機1において、第1の測位モードと第2の測位モードとのうち、
現在の時刻(今回)の測位モードで実行したKF測位処理の測位結果の精度に応じて、次
の時刻(次回)以降の測位モードが第1の測位モード又は第2の測位モードに切り替えら
れる。第2の測位モードに切り替えられた場合には、KF測位処理が継続的に行われるこ
ととなり、第1の測位モードに切り替えられた場合には、KF測位処理の継続は中断され
て、一旦LS測位処理が行われた後に、その測位結果を基礎値としたKF測位処理が行わ
れる。
(もっと読む)
RFIDタグの空間−時間内の推定位置を決定するための方法、コンピュータ・プログラム及びデータ処理システム
【課題】不完全なデータを使用してRFIDタグの空間−時間内の位置を推定する。
【解決手段】一の時間範囲にわたって、RFIDタグからの信号が複数の受信機で受信される。前記信号は、前記時間範囲内の任意の特定時間に、3つ未満の受信機で受信される。前記信号は、前記時間範囲内の特定時間に生成される。前記時間範囲内の所与の時間における所与の受信機での前記信号の受信は、一のイベントを構成する。このようにして、前記時間範囲内に、複数のイベントが発生する。また、前記複数の受信機の対応する位置は、既知である。データ処理システムにおいて、前記複数のイベントを受信する。前記データ処理システム上でアルゴリズムを実行して、前記複数のイベントを処理する。次に、前記アルゴリズムにより、前記複数のイベントに基づき、前記RFIDタグの空間−時間内の位置を推定する。
(もっと読む)
異常衛星検知装置および測位装置
【課題】異常衛星を的確に検知し、また測位精度を高めた異常衛星検知装置および測位装置を構成する。
【解決手段】各測位用衛星から送信される電波を受信して、測位用衛星から受信点までの擬似距離を求め、その電波の搬送波周波数のドップラシフト成分を求め、単位時間当たりの擬似距離変化量とドップラシフト成分による相対速度の単位時間での速度積分値とを求め、両者の差(誤差)が所定のしきい値を超える時、その衛星を異常衛星として検知する。また誤差の分散に応じた重みを擬似距離に付けて測位演算を行うことにより測位精度を高める。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる擬似距離の測定精度を考慮した重み付きDOPを算出すること。
【解決手段】本発明は、観測可能な複数の衛星10からの信号に基づいて移動体90の位置を測位する測位手段40A,40B,40Cを備える移動体測位装置1,2,3において、衛星からの信号に含まれうるノイズ量を衛星毎に推定するノイズ量推定手段70と、前記ノイズ量推定手段により推定された衛星毎のノイズ量に基づいて重み行列Rを作成し、該作成した重み行列を用いて、DOP(dilution of precision)に重み付けを行うことで、重み付きDOP(WDOP)を算出する重み付きDOP算出手段とを備えることを特徴とする。
(もっと読む)
GPS測位装置及びGPS測位方法
【課題】GPS受信機側に新旧の衛星情報が混在する場合であっても、適切な測位演算が可能なGPS測位装置及び測位方法を提供することを目的とする。
【解決手段】複数のGPS衛星から定期的に受信した前記複数のGPS衛星の各々の最新の衛星情報を記憶する衛星情報記憶手段と、前記衛星情報記憶手段により記憶された前記複数のGPS衛星の各々の最新の衛星情報に、最新の衛星情報と最新ではない前回受信時の衛星情報が混在して記憶されているか否かを判断する新旧混在判断手段と、前記新旧混在判断手段による判断結果に応じて、当該GPS測位装置の位置座標を測位演算する測位演算手段とを有することを特徴とするGPS測位装置。
(もっと読む)
予測及びリアルタイム支援型GPSシステムのための分散軌道モデル及び伝播方法
予測GPSサーバ(PGPSサーバ)と、高精度軌道予測ソース(軌道サーバ)と、PGPSサーバにリアルタイムGPS又はGNSS支援データを供給するグローバル基準ネットワーク(GRNサーバ)と、GPS又はAGPSチップセットを装備したデバイス上で実行される予測GPSクライアント(PGPSクライアント)とを含む予測GPS又はGNSSシステムにおいて使用される分散型軌道及び伝播方法。PGPSクライアントからの要求に応答して、PGPSサーバは、現在の衛星軌道状態ベクトル及び軌道伝播モデル係数から成る初期シードデータセットを生成して広める。シードデータセットは、PGPSクライアントが望ましい将来時間まで局所的に衛星軌道を予測及び伝播させることを可能にする。予測支援は、次に、初回測位時間を加速し、位置解決法計算を最適化し、デバイス上に存在するか又はデバイスに結合したGPSチップの感度を改善する。 (もっと読む)
ネットワークにわたって位置を定めるためのシステム
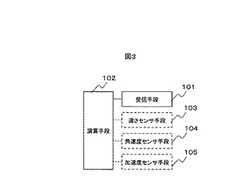
位置が知られている1つまたは複数の送信機によって送信された機会信号を用いて、ネットワークにわたって位置、周波数およびクロックオフセットを定めるためのシステムであって、当該システムは以下のものを含んでおり:すなわち、基地受信機を有しており、当該基地受信機はクロックおよび既知の位置を有しており、前記送信機までのレンジを定め、機会信号の一連のサンプルを採取し、当該一連のサンプルに受信時間、計算されたレンジに基づいて計算された送信時間、またはその両方でタイムタグを付ける。基地受信機は、一連のタイムタグが付されたサンプルと、必要に応じて、計算されたレンジを遠隔受信機に伝送する。所与の遠隔受信機は、機会信号のサンプルを格納し、タイムタグを付け、タイムタグが付された一連のサンプルを、格納されたサンプルと相関させ、タイムオフセットを、遠隔受信機での受信時間と、基地受信機での受信時間または基地受信機で計算された送信時間の1つまたは両方との差として計算する。遠隔受信機は位置を、当該タイムオフセットと、必要に応じて、基地受信機によって提供されたレンジに基づいて計算する。遠隔受信機の高さが、位置計算の一部として計算されてもよい。これは、Z座標を平均的な高さに強制することに基づいて反復して定められる、または、基地受信機と遠隔受信機での気圧センサ示度における差から定められる。 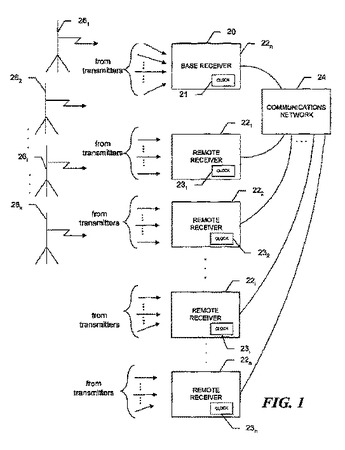 (もっと読む)
(もっと読む)
初回出力測位位置決定方法、プログラム、測位装置及び電子機器
【課題】初回に出力する測位位置の精度向上。
【解決手段】初回の測位では、捕捉されたGPS衛星信号をもとに決定現在位置Pを算出する測位処理を1回以上繰り返して行う。この各回の測位処理においては、決定現在位置P及び時刻誤差Tを算出すると、算出した決定現在位置P及び時刻誤差Tが、所定の「高度差条件」及び「収束条件」それぞれを満たすかを判定し、少なくとも一方の条件を満たすと判定した場合、決定現在位置Pを初回の測位位置として出力する。そして、初回の測位位置を決定し出力した後は、測位処理毎に、算出した決定現在位置Pを測位位置として出力する。
(もっと読む)
自律的軌道伝播システム及び方法
【課題】ナビゲーション衛星軌道位置データを予想し、使用するための方法及び装置を提供する。
【解決手段】衛星の位置を予想する方法において、GPS装置は、天体暦のような衛星の位置に関する以前に受信した情報に基づいて、衛星の補正加速度を発生し、これを使用して、以前に受信した情報が有効であった時間フレームの外側で衛星の位置を予想することのできる方法が提供される。計算は、GPS装置で完全に遂行することができ、サーバーからの支援を必要としない。しかしながら、サーバーからの支援がGPS装置に利用できる場合には、支援情報を使用して、予想される位置の精度を高めることができる。
(もっと読む)
位置推定システム、方法及びプログラム
【課題】 複数のアクセス・ポイントから受信した電波強度に基づき、位置を高い精度で推定すること。
【解決手段】 位置の推定に、ラベル伝播法を適用した。特に、電波強度ベクトルの間の類似度の計算に、qノルム(0 < q < 1)を使用したことで、電波強度の変動に強い、高い精度の位置推定方法が達成された。電波強度の測定の際の時間的推移を示す、時系列値を考慮して、時間的類似度を計算し、電波強度ベクトルの間の類似度よりも、時間的類似度の方が大きい場合は、時間的類似度の方を優先して使用することにより、更に位置推定精度が向上された。qノルム(0 < q < 1)以外にも、べき乗減衰型関数を類似度の計算に使用することができる。また、ラベル伝播法以外にも、近接関係に基づき位置ラベルを推定する技法全般に、適用可能である。
この技法の応用例として、スーパーマーケットの動線解析などがある。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響の有無を検出し、マルチパスの影響がある場合にはその影響を低減し、測定精度を向上させること。
【解決手段】複数のGNSS衛星から送信される測位信号に基づいて位置を算出するGNSS受信装置に、測位信号に基づいて求められた擬似距離の時間特性に基づいて、該測位信号がマルチパスの影響を受けて受信されたか否かを判断するマルチパス判断手段と、測位信号がマルチパスの影響を受けて受信されたと判断された場合に、擬似距離の時間特性に基づいて、直接波の位相と反射波の位相とが等しくなるゼロ点を求める位相差ゼロ点算出手段と、測位信号に基づいて求められたドップラー周波数の積算値の時間特性と、位相ゼロ点算出手段により求められたゼロ点に基づいて、擬似距離を修正する擬似距離修正手段と、修正された擬似距離に基づいて位置を求める測位演算手段とを備えることにより達成される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】マルチパスの影響を考慮して、信頼性の高い測位結果を提供すること。
【解決手段】GPS衛星からの衛星信号を探索して衛星が捕捉され、これらの捕捉衛星を組み合わせて測位用の衛星組合せが抽出される。そして、抽出された衛星組合せそれぞれについて、当該衛星組合せを構成する各捕捉衛星からの衛星信号を用いたマスタ測位演算と、当該衛星組を構成する捕捉衛星のうち、仰角が所定の低仰角条件を満たし、受信衛星信号の信号品質が所定の低品質条件を満たす低仰角衛星を除く残余の捕捉衛星の衛星信号を用いたサブ測位演算とが行われ、マスタ測位演算で求められたマスタ測位位置とサブ測位演算で求められたサブ測位位置との差異に基づいて、当該衛星組合せを用いた測位結果の適不適が判定される。そして、適不適判定により適当と判定された衛星組合せについてのマスタ測位演算で求められた位置の中から測位結果位置とする位置が決定される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】測位処理の切り替えによる測位精度の低下を防止すること。
【解決手段】複数のGPS衛星から発信されているGPS衛星信号を受信して最小二乗法
を用いたLS測位処理を行って現在位置が測位される。そして、LS測位処理の結果が、
測位処理を移行する条件として予め定められた測位移行条件を満たすか否かが判定され、
満たすと判定された場合に、LS測位処理を停止させ、複数のGPS衛星から発信されて
いるGPS衛星信号を受信してカルマンフィルタを用いたKF測位処理をが行われて、現
在位置が測位される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】測位位置の位置飛びを考慮して、適切な位置出力を行うこと。
【解決手段】GPS衛星から発信されているGPS衛星信号に基づいて携帯型電話機1の
現在位置及び移動速度ベクトルが間欠的に計測される。また、今回測位位置を位置飛びと
判定しない認容位置領域が計測結果に基づいて設定され、認容位置領域内に今回測位位置
が位置するか否かによって位置飛びが判定される。そして、位置飛びと判定されなかった
場合に、従前の計測結果から算出した予想位置を用いて今回測位位置を補正する補正処理
が行われ、今回出力位置が決定されて出力される。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて距離相当
値が測定される。また、捕捉したGPS衛星信号の信号強度に基づいて当該捕捉衛星につ
いての位置補正処理で用いる位置R値の初期値が設定されるが、当該捕捉衛星の観測値「
Z」が、GPS衛星からのGPS衛星信号の受信環境に基づいて設定された適否判定条件
により不適と判定される場合は、位置補正処理で用いる位置R値が初期値より大きな値に
設定される。
(もっと読む)
位置決定データを処理する方法
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、(i)1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、(ii)位置決定データを処理して、位置決定データから速度データを生成する工程と、(iii)ナビゲーション装置による使用に適切なマップデータの生成が起こった、ナビゲーションできる区域に速度データを関連付けるために、マップデータを速度データでアップデートする工程と、を含み、生成された速度データは、速度データを生成する位置決定データが発生したナビゲーションできる区域と関連付けられている、ことを特徴とする方法。 (もっと読む)
位置決定データを処理する方法
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを生成するために位置決定データを処理する方法であり、少なくとも1つのナビゲーションできる区域に、一般的には各ナビゲーションできる区域に、関連付けられた速度データを、該速度データが該速度データと関連付けられたナビゲーションできる区域のパラメータに従って分類され得る複数の分類を持つクラシフィケーションの1つの分類に分類する工程と、クラシフィケーションの各分類ごとの分類平均を生成する工程と、関連付けられた速度データが存在するかを確認するために、少なくともいくつかのナビゲーションできる区域を、一般的には各ナビゲーションできる区域を、評価する工程と、あるナビゲーションできる区域に関連付けられた速度データが存在しない場合、処理中のナビゲーションできる区域のパラメータに従って、前記分類平均を該処理中のナビゲーションできる区域の速度データとして用いる工程と、を含むことを特徴とする方法。 (もっと読む)
測位システム
【課題】1つの線形回帰方程式を用いて容易に且つ高精度に電離層遅延を推定演算する。
【解決手段】基地局1は、測位衛星SATからの測位用信号を受信して、キャリア位相積算値およびコード疑似距離を取得する(S1)。基地局1は、航法メッセージを取得、解析して、電離層遅延の推定演算に利用する測位衛星の情報を取得する(S2,S3)。基地局1は、基地局1と測位衛星との距離に関して、過去の推定演算により得られた測位衛星位置の周りでテイラー展開することで線形近似を行う(S4)。基地局1は、測位衛星位置に関する線形近似の結果を行列演算要素とし、電離層遅延を未知数として含み、キャリア位相積算値およびコード疑似距離と基地局位置とから算出される値を観測値として、線形回帰方程式を設定する。基地局1は、この線形回帰方程式にカルマンフィルタ等を適用して、電離層遅延を推定演算する(S5)。
(もっと読む)
衛星航法システムにおける電離層遅延量の補正方法及びその装置。
【課題】静止衛星型衛星航法システム(SBAS)における電離層遅延量の推定値に関する信頼区間を短縮する。
【解決手段】航法衛星からの測位信号により電離層遅延量及びその他の補正情報を作成するための複数のモニタ局を既知点に配置し、このモニタ局以外の地点に、航法衛星からの測位信号をそれぞれ受信してそれぞれ電離層遅延量を測定するための複数のGPS受信機を配置し、互いに隣接して四角形を形成する4つのIGPにおいて、航法衛星からの測位信号を受信して電離層遅延量をそれぞれ求め、4つのIGPに囲まれる領域内の地点における電離層遅延量を表す平面をそれぞれ求め、GPS受信機により測定された電離層遅延量の測定値を、それぞれGPS受信機毎に求め、4つのIGPに囲まれる領域内の地点の電離層遅延量に関する平面と、GPS受信機毎に求めた測定値との差の最大値を、電離層遅延量の推定値に関する信頼区間の補正情報とする。
(もっと読む)
421 - 440 / 675
[ Back to top ]