
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
361 - 380 / 675
GPS受信機とGPS信号を処理する方法
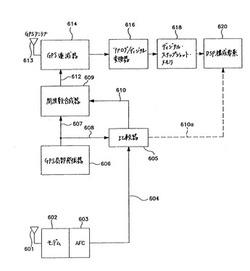
【課題】 GPS受信機中の局部発振器を較正すること。
【解決手段】受信機は高精度搬送波周波数信号に自動的にロックし、基準信号を発生し、この基準信号で局部発振器を較正する。
(もっと読む)
測位システム、中継装置および測位装置

【課題】伝送効率を向上できる測位システムを得ること。
【解決手段】複数の探知情報に基づいて目標の測位を行う測位装置に対して探知情報を中継する中継装置を備えた測位システムにおいて、中継装置が、複数の探知情報を受信した場合に、2つの探知情報を単位とする全組合せについて、2つの探知情報を相対的にずらしながら比較し、情報パターンを抽出して保持する情報パターン比較部24と、2つの探知情報の情報パターンが保持されている場合に当該情報パターンを含ませた探知情報を生成し、一方、情報パターンが保持されていない場合は、2つの探知情報を用いて所定の符号化処理を行い、当該符号化結果を含ませた探知情報を生成する符号化部26と、2つの探知情報を単位とする全組合せについて、符号化部26にて生成された探知情報を送信する探知情報送信部27と、を備える。
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
地理的位置の現在の測定値を地図対象物に割り当てるための装置および方法
地理的位置の現在の測定値12−nを、地理的地図の地図対象物14に割り当てるための装置20。処理装置22は、現在の測定値12−nが、第1の地図対象物14−1に割り当てられるかどうかを指示する、第1の確率測度P1を決定し、かつ、仮に、第1の確率測度P1が、第1の地図対象物14−1への現在の測定値12−nの割り当てがありそうもないことを示すならば、現在の測定値12−nが、第2の地図対象物14−2に割り当てられるかどうかを指示する、第2の確率測度P2を決定する。現在の測定値12−nは、隣接地理的位置の一連の隣接測定値から発生する。一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に既に、第1の地図対象物14−1に割り当てられている。第2の地図対象物14−2は、第1の地図対象物14−1との交差点を有している。 (もっと読む)
測位方法、プログラム及び測位装置
【課題】方位のばらつきに起因する測位位置の直進性の低下を防止すること。
【解決手段】携帯型電話機1において、第1のKF(カルマンフィルタ)測位処理により求めた携帯型電話機1の移動速度が所定の閾値速度未満であることを検出した場合に、当該検出直前の携帯型電話機1の移動速度を保持する。そして、第1のKF測位処理により求めた携帯型電話機1の位置、移動速度及び方位を観測情報とする第2のKF測位処理を行って測位するが、この際、保持されている方位を観測情報としてKF処理を行う。
(もっと読む)
GPS携帯電話による測量システム
【課題】測量現場において簡便な方法で、位置、面積、距離等の概算測量をリアルタイムに実現する。
【解決手段】複数のGPS人工衛星2と、地上のGPS基地局4からの電波を同時に受信するGPS携帯電話により、多角形土地等面積Sを測量をする場合に当該多角形土地等の頂点Pを囲むように当該GPS携帯電話3を順番に移動し、当該多角形土地等の頂点Pである複数の測位地点でGPSデータを取り込み、最終測位地点でのGPSデータを取り込んだ後、当該GPSデータを一括にメールM1に添付して計算センター等5に送信し、当該計算センター等5は補正計算と多角形土地等の面積Sを計算し、土地測量の計算結果をメールM2に添付して当該GPS携帯電話あてに返信してくるとともに、当該測位地点間の距離を計算し距離の合計Lを算出することで距離の測量も可能にする。
(もっと読む)
位置推定装置
【課題】自己位置の推定の際に使用する距離計測値の精度を向上した位置推定装置を提供する。
【解決手段】移動装置1に搭載して当該移動装置1周囲の障害物Sまでの距離を計測する距離計測装置6Aと、その距離計測装置6Aによる計測値に基づき上記移動装置1の位置を推定する位置推定手段6Eと、を備える。距離計測装置6Aによる計測結果のうち、距離測定時における移動装置1の姿勢に対してロバストな計測値を選択して、位置推定手段6Eで使用する計測値とする。
(もっと読む)
無線自動識別タグの位置を推定及び追跡するシステム並びに方法
1又は複数の無線自動識別(RFID)タグの位置を特定するシステム及び方法が提供される。照射されたRFIDタグの受信情報信号の位相差は、RFIDタグの位置を特定するために使用される。1又は複数のエキサイタは、RFIDタグを照射するように呼出信号を送信し、このエキサイタは、複数のアンテナを有し、2又は複数のアンテナを介して選択的に送信するように構成され、かつ1つのアンテナで受信するように構成される。同一RFIDタグの複数読み取りはまた、RFIDタグの位置の確率モデルを作成するように行われてもよい。拡張粒子フィルタは、正確なRFIDタグの位置を求めるために確率モデルに適用される。 (もっと読む)
最良のWLAN−PS導出解を選択することによるハイブリッド衛星/WLAN測位システムを使用した位置を決定する方法及びシステム
【課題】
本発明は、ハイブリッド測位システムを作るためにWLANを利用した測位システム(WLAN‐PS)及び衛星を利用した測位システム(SPS)を統合する方法を提供する。
【解決手段】
統合された又はハイブリッドのシステムは、測位及び速度推定及び方位推定の精度及び予測誤差推定の精度を高めるため、及び独立して機能する各個別のシステムと比較して消費電力を低減するために、1つ又はそれ以上のシステムからの測定値を組み合わせるシステムを指している。ハイブリッド測位システムを作り出すためにWLAN−PS及びSPSを統合する方法は、別の入力として未処理のSPS測定値をWLAN−PSへ及び別の入力としてWLAN‐PS最終推定をSPSに追加することができる。2つ又はそれ以上の衛星からの未処理のSPS測定値は、WLAN−PSが位置推定、HPE及び静止ユーザー検出の精度を高めることを支援することができる。WLAN−PS初期位置推定及び他の推定は、同様に、SPSが初回測位時間(TTFF)及び電力消費を低減することを支援することができる。ハイブリッド測位システムは、更に、精度向上又は他の推定に関する値を追加していない時には、WLAN−PS又はSPSの動作を停止することで、別々に作動するWLAN−PS及びSPSと比較して電力消費を低減することができる。
(もっと読む)
二重周波数方式の衛星ナビゲーション・システムにおけるコンティニュイティの改善方法
【課題】二重周波数方式の衛星ナビゲーション・システムにおけるコンティニュイティの改善方法を提供する。
【解決手段】2つ以上の周波数帯での計測を行うことにより電離圏をモニタするステップ(S10)と、少なくとも1つの計測の計測結果により、1つまたは複数の所定の条件から逸脱した電離圏の変動が発生していることが示されたときに、電離圏の変動に関する情報をユーザ・システムに通知するアラーム・メッセージを伝送するステップ(S12)とを含む。
(もっと読む)
補正値予測式推定方法、位置特定用補正値の算出方法、補正値予測式推定プログラムおよび位置特定用補正値算出プログラム
【課題】膨大な補正値を用いる必要なく高精度に位置特定できるようにする。
【解決手段】移動局は、単独で測位し(S1)、基準局に概略位置を送信する(S2)。基準局は、最も近い基準局を選択し補正値予測式を選択し(S3)、予測式の係数または補正値予測式を送信し、移動局は、送信された予測式の係数または補正値予測式を用いて測位計算する(S6)。
(もっと読む)
異常な擬似距離測定値から無線ナビゲーション受信機ユーザを保護するための方法
本発明は、異常な擬似距離測定値に対して無線ナビゲーション受信機ユーザを保護するための方法に関する。この方法は、測定値の残差を計算することに基づいた統計的推定スキームによって測定誤差が検出されることを特徴とする。
この方法は、特に、任意の地上部分の自律した方法で(したがって、RAIM機能を実行して)、どんな完全性機能もない既製の受信機(「基本的」と呼ばれる)の性能を向上させることと、堅固な統計的推定アルゴリズム、すなわち測定誤差によって全く影響されないアルゴリズムの使用、および動的基準の実行を通じて、位置の計算への入力における測定値を損なう起こり得る誤差を検出することと、かかる誤差が検出された場合には、それを除外することによって、基本的受信機により提供される位置のための堅固な補正を計算することと、を可能にする。
(もっと読む)
衛星ナビゲーション・システムにおけるステータス・レポートの最適化方法
【課題】衛星ナビゲーション・システムにおけるステータス・レポートを最適化する方法を提供する。
【解決手段】衛星ナビゲーション・システムの通信網に関する情報を求める情報取得ステップ(S10)と、求めた前記情報を、ステータス・レポートとして、1つまたは複数のナビゲーション・メッセージを介して伝送する情報伝送ステップ(S12)とを含む。
(もっと読む)
移動体位置推定方法及び移動体位置推定システム
【課題】設置センサ、移動体の位置情報を自動でキャリブレーションするだけでなく移動体のトラッキングも同時に行う。
【解決手段】測定領域内を移動する移動体Mの位置を推定する場合に、測定領域内のn箇所以上の地点の送信機T1〜Tnから移動体M(受信機R)までの距離を互いに時刻同期した状態で測定し、各測定地点から移動体Mまでの任意の測定時刻の距離データを受信機Rで取得し、位置推定装置Pにおいて、取得された任意の測定時刻の距離データから個々の測定地点及び移動体それぞれの位置を推定する。その際、移動体Mの移動前後の位置それぞれの3箇所以上の測定地点から得られる距離データを用いて、各測定地点の位置のキャリブレーション及び移動体Mの移動位置の推定を同時に行う。
(もっと読む)
移動局測位システム
【課題】移動局による電波の送信電力の変動の影響を受けることのない、電波の受信電力を利用した移動局測位システムを提供する。
【解決手段】移動局から送信された電波が各基地局において受信され、基地局の受信電力測定部に38よってそれぞれ測定された受信電力に基づいて、距離比算出部54により、対をなす基地局間の受信電力の差が算出され、受信電力の差に基づいて一方の基地局と移動局との距離と、他方の基地局と移動局との距離との距離比が算出される。算出された距離比を実現する位置を表す点の連なりである軌跡が軌跡生成部56により生成され、位置算出部58により、複数の基地局対についての軌跡の交点を算出することにより移動局の存在位置の候補が算出される。
(もっと読む)
3次元測位システム
【課題】単一の発信手段あるいは単一の発信手段から発信される無線信号を単一の受信手段で受信することによって、受信手段の3次元の位置を高精度で測位するシステムを安価に実現する。
【解決手段】アンテナ10a〜10dを周期的に切替えられながら、同期信号と距離測定信号を一組とする複数組の無線信号を放射する単一の発信手段2と、単一の受信手段6によって構成される。前記受信手段6において、前記アンテナ10a〜10dに対応して受信する複数組の無線信号から搬送波信号を再生して位相および位相差を測定して方向12を測定し、前記複数組の無線信号の内の同期信号を起点として距離測定信号の位相および位相差を測定して距離11を測定することによって高精度の3次元測位が実現できる。
(もっと読む)
GPSデータ処理装置及びGPSデータ処理プログラム及び記録媒体
【課題】GPS受信機や複合型測位システムの開発において、時間やコストをかけることなく、GPS受信環境の悪い状態を作成する装置を提供する。
【解決手段】測位精度評価装置300は、データ変換部320、GPS衛星マスク処理部340等を備えている。データ変換部320は、複数のGPS衛星の配置を示す衛星配置情報を含むGPSデータを受信するGPS受信機によって受信されたGPSデータをRINEXデータ形式に変換する。GPS衛星マスク処理部340は、RINEXデータ形式に変換された変換GPSデータに含まれる衛星配置情報から、削除条件に合致するGPS衛星を削除することにより、削除条件に合致するGPS衛星の削除された削除後変換GPSデータを作成する。
(もっと読む)
位置情報監視システム及び方法
【課題】監視対象が客なのか従業員なのか、徒歩による移動なのか、乗り物による移動なのかなど、監視対象の属性に応じて監視方式を変更し、監視対象の属性に基づく特有の行動を把握することで、適正な監視を行う。
【解決手段】 移動端末1a〜1cにより、電波信号を介した無線によりデータ通信を行い、該データ通信により、当該移動端末において受信される電波強度に関する情報を無線情報として送信するとともに、自機周辺の状況を周辺情報として発報し、監視側において、アクセスポイントを通じ、移動端末1a〜1cから周辺情報及び無線情報を収集し、各移動端末の位置情報を生成し、各移動端末の属性に応じて、生成された位置情報を修正し、移動端末の位置情報と、移動端末からの周辺情報とを関連づけて表示する。
(もっと読む)
測位システム
【課題】測位精度を簡素な手法により可変制御することで、制御の簡素化及び処理の迅速化を図る。
【解決手段】測位システム8は、移動局19と、基地局12A〜Dと、移動局10から送信され基地局12で受信した測距用電波信号に基づき、移動局10から基地局12までの測距処理を行う測位サーバ14とを有し、移動局10は、入力信号に基づき、送信する測距用電波信号に含まれる拡散符号の符号長を決定する符号長決定部35と、符号長決定手段35で決定された符号長の拡散符号を生成する拡散符号発生部38とを備え、基地局12は、移動局10の符号長決定部35で決定された符号長に応じ、当該符号長の拡散符号を用いて、受信した測距用電波信号を逆拡散する逆拡散処理部341を備える。
(もっと読む)
位置決定
【課題】移動装置の位置決定技術を提供する。
【解決手段】システム、方法、及びコンピュータプログラム製品は、複数の送信器から移動装置で受信された各信号の検出電力を指示する電力情報を得る。少なくともその得られた電力情報を使用して、移動装置がその対応位置にある確率を各々指示する各確率値を複数の位置に対して決定する。少なくとも一部分はその決定された確率値に基づいて移動装置の推定位置を識別する。
(もっと読む)
361 - 380 / 675
[ Back to top ]