
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
301 - 320 / 675
一般化した誤差分布を用いる位置推定方法
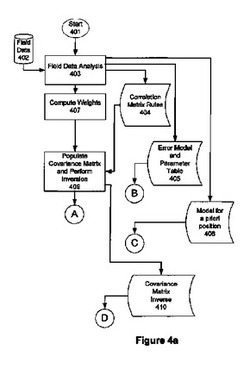
加重最小二乗最適化を組み込んだ無線位置検出システムの結果を改良する方法は、最大事後(MAP)確率メトリックを用いて、特定の測位問題(例えば、UTDOA)の特性を組み込むことによって、加重最小二乗法を一般化する。加重最小二乗法は、通例、TDOA、ならびにTDOA/AOAおよびTDOA/GPS混成システムを含む、関連のある位置検出システムによって用いられる。組み込まれる特性には、TDOA誤差についての経験的情報、および他のネットワーク・エレメントに対する移動体の位置の確率分布が含まれる。TDOA誤差分布および事前移動体位置をモデリングする技法を提供する。この新しい確率分布モデルを用いて、MAP判断メトリックを計算する方法を提供する。フィールド・データを用いる検査は、この方法が既存の加重最小二乗法に対してかなりの改良をもたらすことを示す。 (もっと読む)
測位システム及び測位方法

【課題】 精度が十分でない測位方法によって得られた測位結果の精度を向上させる。
【解決手段】 測位要求端末20の位置を推定する測位サーバ10は、リファレンス端末21についての同じ位置における低精度及び高精度の測位方法による測位結果を記憶するリファレンスデータベース11と、測位要求端末20の測位結果を取得する測位結果取得部13と、測位要求端末20の測位結果によって示される位置から所定の距離にあるリファレンス端末21の測位結果に係る情報を抽出する抽出部14と、抽出された情報に基づくリファレンス端末21の2つの測位結果間の差分を用いて測位要求端末20の測位結果を補正する補正部15と、補正された測位結果を出力する出力部16とを備える。
(もっと読む)
追従制御装置及び追従制御方法
【課題】追従性を向上した追従制御を課題とする。
【解決手段】車両1に設置した複数の無線通信手段Qでそれぞれ上記電波発信源8からの電波を受信して、各無線通信手段Qから電波発信源8までの各相対距離を取得する。取得した複数の相対距離から、車両1に対する電波発信源8の相対位置座標を取得する。無線通信手段Q毎に基準通信距離L内の検出設定エリアをそれぞれ想定し、その複数の検出設定エリア及びその検出設定エリアの重なりで区分される複数の存在判定エリアのうち、電波発信源8がどの存在判定エリアに位置するか上記取得した複数の相対距離から推定する。推定した存在判定エリアに基づき、目標位置取得手段3Bが取得した電波発信源8の相対位置座標の正当性を判定し、正当と判定した電波発信源8の相対位置座標に向けて車両1の移動を制御する。
(もっと読む)
二次センサおよび信号強度を用いるGPSの修正
信号源(例えば、モバイルユニットの近くの塔)からの1つまたは複数の信号強度を用いて、ポジショニングシステムの誤差を軽減するシステムおよび方法。この軽減システムは、GPSデータを受信するモバイルユニットが、静止位置にあるか(例えば、動いていない)、または動いているか(例えば、動的位置にある)否かを検証し、GPSの報告の精度を評価する(例えば、静止位置にあるGPSデータを廃棄し、動的位置にあるGPSデータを信頼する)。 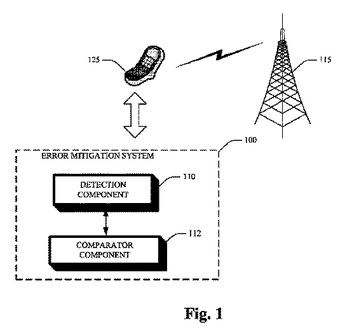 (もっと読む)
(もっと読む)
GNSS受信装置及び測位方法
【課題】測定精度を向上させること。
【解決手段】GNSS受信装置は、GNSS衛星からの測位信号に含まれるコードを用いて、当該GNSS受信装置により観測すべきデータを求める手段と、GNSS衛星からの測位信号に含まれる軌道情報に基づいて、GNSS衛星の位置を算出する手段と、測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する手段と、算出されたGNSS衛星の位置と、推定された当該GNSS受信装置の位置とに基づいて、GNSS衛星と当該GNSS受信装置との間で観測すべきデータを推定する手段と、当該GNSS受信装置の有する誤差に起因する観測データの誤差を推定する手段と、観測データと、観測データ推定値と、受信装置誤差推定値に基づいて、観測データに含まれる誤差を推定する観測データ誤差推定部と、推定された観測データ誤差が所定の閾値以下である観測データを用いて測位演算を行う手段とを有する。
(もっと読む)
物品管理端末および物品管理システム
【課題】RFIDタグの電波強度に基づいて、RFIDタグが貼り付けられた物品の存在範囲を確信度に応じて分かりやすく表示する端末装置および物品管理システムを提供する。
【解決手段】物品管理システムの端末10において、端末位置検出部11は、RFIDタグの電波強度を測定したときの端末位置を無線LAN測位サーバから取得する。タグ読取部12が物品に貼り付けられたRFIDタグのID情報を取得し、タグDB検索部14がID情報からタグDB2に格納された物品管理情報を取得する。電波強度測定部13がRFIDタグの電波強度を測定し、存在範囲判定部15が電波強度に基づいてRFIDタグの端末10を中心とした存在範囲を判定し、存在範囲確信度算出部16が存在範囲の確信度を算出する。表示情報生成部17は、物品の存在範囲を確信度に基づいて地図データ3に表示させた表示情報を作成し、情報表示部18が画面表示する。
(もっと読む)
移動体位置特定装置
【課題】より精度良く移動体の位置を特定することが可能な移動体位置特定装置を提供すること。
【解決手段】衛星からの電波に基づき移動体の位置を演算する第1の演算手段と、移動体の挙動に基づき前記移動体の位置を演算する第2の演算手段と、第1の演算手段による演算結果と第2の演算手段による演算結果のいずれか一方、又は双方に基づいて移動体の位置を特定する位置特定手段と、を備える移動体位置特定装置であって、位置特定手段は、移動体が強電磁界領域内に在るか否かを判定し、移動体が強電磁界領域内に在ると判定した場合には、判定手段により前記移動体が強電磁界領域に在ると判定されなかった場合に比して、第2の演算手段による演算結果を重く用いて前記移動体の位置を特定することを特徴とする。
(もっと読む)
位置表示装置および現在位置決定方法
【課題】 装置の周辺の状態に関わらず位置を正確に検出すること。
【解決手段】 携帯型ナビゲーション装置は、GPS無線信号を受信するGPS信号受信部(S01)と、GPS信号に基づいて第1現在位置を決定する第1現在位置決定部(S02)と、移動方位を検出する方位検出部(S09)と、移動距離を検出する移動距離検出部(S10)と、基準位置と移動方位と移動距離とに基づいて、第2現在位置を決定する第2現在位置決定部(S11)と、装置周辺の状態を検出する状態検出部(S16)と、検出された状態と第1現在位置に基づいて(S17でNO)、基準位置を設定する基準設定部(S18)と、を備える。
(もっと読む)
災害緊急地盤変動解析システム及び災害緊急地盤変動解析方法
【課題】観察者の所望の時間において、大きな災害が発生する箇所を緊急に判定することのできる災害緊急地盤変動解析装置を提供する。
【解決手段】通信ネットワークによって接続され複数の異なる地点に固定設置された座標計測装置のそれぞれが位置観測用衛星から受信した衛星測位信号であって、座標計測装置のそれぞれが所定の時間間隔で24時間分取得した衛星測位信号を、所定の間隔毎に通信ネットワークを介して受信する。そして、受信した24時間分の衛星測位信号に基づいて、座標計測装置それぞれの24時間平均の地心直交座標を算出し、所定の間隔毎に24時間平均の地心直交座標の算出結果を表示した地心直交座標変動結果を出力する。
(もっと読む)
衛星位置決めシステム受信機を作動する方法および装置
【課題】衛星位置決めシステム受信機を作動する方法および装置
【解決手段】クライアント/サーバアーキテクチャにおいて衛星位置決めシステム(SPS)受信機を操作するための装置および方法。方法の1事例において、第1の時間に第1の複数の擬似距離が決定され、第1の時間の後の第2の時間に第2の複数の擬似距離が決定される。第1の複数の擬似距離および第2の複数の擬似距離は記憶される。第2の時間の後、第1の複数の擬似距離および第2の複数の擬似距離は、通常1つの送信でロケーションサーバに送信される。該ロケーションサーバはその後、該第1の複数の擬似距離から第1位置を決定し、該第2の複数の擬似距離から第2位置を決定する。1つの特定の例においては、該第1の複数の擬似距離および該第2の複数の擬似距離は、所定の種類の事象に応答して送信され、該ロケーションサーバは、時間にわたり収集されたディファレンシャルGPSデータの集合を記憶する。
(もっと読む)
フィンガープリント測位のための方法と装置
位置決定支援データを提供する方法には、ユーザ装置のためのセル・リレーション構成の確立(210)とユーザ装置のための高精度位置決定の実行(212)との反復を備える。同じセル・リレーション構成に属する決定の結果は、個々のクラスタ化された結果へとクラスタ化される(214)。多角形によりクラスタ化された結果を取り囲むこと(221)と、収縮点に向けて角を移動することにより多角形を縮小すること(222)と、クラスタ化された結果の所定の割合を備える縮小多角形として領域定義を定めること(223)とにより、領域定義はクラスタ化された結果と関連させる(220)。収縮点はクラスタ化された結果内に位置するよう選択される。また、本方法には、セル・リレーション構成と関連の領域定義との間の関連を備える位置決定支援データの生成(230)を備える。位置決定支援データを提供する装置も提示される。  (もっと読む)
(もっと読む)
基地局選択方法、移動局測位システム、移動局および基地局
【課題】移動局との電波の送受信が良好に行なわれる基地局を選択するための基地局選択方法、移動局の位置を算出する移動局測位システム、移動局、および基地局を提供する。
【解決手段】受信強度検出部52により、移動局10と複数の基地局12とのいずれか一方により送信される所定のパターンにより位相が変化させられる電波が他方により受信され、受信強度の最大値と最小値とが基地局12ごとに検出され、選択部64により、受信強度検出部52によって複数の基地局12ごとに検出される受信強度の最大値と最小値とに基づいて、移動局10との電波の送受信が良好に行なわれる基地局が選択されるので、所定のパターンにより位相が変化させられる電波の受信強度の最大値と最小値とに基づいて、マルチパスによる干渉等の影響が小さく、移動局10との電波の送受信が良好に行なわれる基地局12を選択することができる。
(もっと読む)
データベース管理システム、データベース管理方法、受信環境変化検出システム及び受信環境変化検出方法
【課題】 移動通信端末の測位に用いられる、電波の受信強度と位置との関係を示す情報を保持するデータベースを適切に更新する。
【解決手段】 測位サーバ10は、セルラ端末(移動通信端末)20の測位に用いられる、セルラ基地局30に応じた当該電波の受信強度と位置との関係を示す情報を保持する測位用データベース11を管理する。測位サーバ10は、セルラ端末20によって受信される、セルラ基地局30に応じた電波の受信強度を示す強度情報を受信する強度情報受信部12と、セルラ端末20によって電波が受信された位置を示す位置情報を受信する位置情報受信部13と、受信された強度情報に基づき電波の受信環境に時間的な変化があったことを検出する環境変化検出部14と、検出された変化に応じて測位用データベース11を更新する更新部16とを備える。
(もっと読む)
移動体位置推定システムと移動体位置推定方法及び移動体位置推定プログラム
【課題】設置センサの位置情報を自動でキャリブレーションしつつ移動体の位置計測も合わせて行う。
【解決手段】測定領域内を移動する移動体Mの位置を推定するシステムにおいて、測定領域内に互いに分散して配置され、互い移動体Mまでの距離を3個以上の距離センサT1〜Tnで計測し、位置推定算出装置Pにて、距離センサそれぞれから任意の時刻のセンサ計測値を取得し蓄積し、取得蓄積された各距離センサのセンサ計測値に対して距離に応じた信頼性の度合いを示す距離信頼度を付与し、取得蓄積されたセンサ計測値のうち信頼度の高い計測値を採用して距離センサ及び移動体それぞれの位置を推定するようにし、位置推定の処理は、移動体Mの移動前後の位置それぞれの2個以上の距離センサから得られるセンサ計測値を用いて各距離センサの位置のキャリブレーション及び前記移動体の移動位置の推定を行う。
(もっと読む)
データベース管理システム及びデータベース管理方法
【課題】 新たな電波の発信源が設けられた場合に、移動通信端末の測位に用いられる、電波の受信強度と位置との関係を示す情報を保持するデータベースを適切に更新する。
【解決手段】 測位サーバ10は、セルラ端末(移動通信端末)20の測位に用いられる測位用データベース11を管理する。測位サーバ10は、セルラ端末20によって受信される、セルラ基地局30に応じた電波の受信強度を示す強度情報を受信する強度情報受信部12と、セルラ端末20によって電波が受信された位置を示す位置情報を受信する位置情報受信部13と、受信された強度情報に係る発信源に新規発信源があるか否かを判断する新規発信源判断部14と、位置情報から新規発信源に係る受信強度を更新に用いるかを判断する更新判断部16と、当該判断に応じて測位用データベース11を更新する更新部17とを備える。
(もっと読む)
設置誤差推定装置および設置誤差推定方法
【課題】誤差のない高精度な測位を簡単な設置で実施可能にすることができる設置誤差推定装置を提供すること。
【解決手段】設置誤差推定装置100は、無線タグ300を設置して測位する観測点毎に、理論上の測位分布を予想して得られた予想測位分布の特徴的なパターンを算出して得られた予想測位分布パターンを取得する予想パターン取得部(観測点設定部110および予想パターン計算部120)と、無線タグ300に対するタグリーダ200の測位結果を観測データとして入力する観測データ入力部130と、観測データに基づいて、観測点毎に、測位結果を統計的に解析して得られた計測測位分布の特徴的なパターンを計測測位分布パターンとして算出する散布パターン解析部140と、取得された予想測位分布パターンおよび算出された計測測位分布パターンを用いて、ダグリーダ200の設置誤差を算出する設置誤差推定部150とを有する。
(もっと読む)
移動体位置測位装置
【課題】移動体の測位をより継続的且つ正確に行なうこと。
【解決手段】複数の衛星からの信号を受信する受信手段により受信された信号を観測して得られる複数の観測データの一部又は全部を選択する観測データ選択手段と、観測データ選択手段により選択された観測データに基づいて測位演算を行なう測位演算手段とを備える移動体位置測位装置であって、観測データ選択手段は、複数の観測データのそれぞれに対応する複数の誤差推定値を算出し、算出した複数の誤差推定値から、最大値と最小値の差が所定値未満であり個数が所定個数以上の誤差推定値群を抽出し、抽出した誤差推定値群のうち最も標準偏差の小さい誤差推定値群に含まれる誤差推定値に対応する衛星からの信号による観測データを選択することを特徴とする。
(もっと読む)
移動局測位方法、測位基地局選択方法、移動局測位システム
【課題】妨害波やマルチパスによる干渉を受ける基地局を除いた基地局を測位に用いる測位基地局として選択する測位基地局選択方法、及び測位基地局を用いて移動局を測位する移動局測位方法、移動局測位システムを提供する。
【解決手段】仮測位部56により、基地局組が設定され、基地局組を用いて移動局10の位置が仮測位結果として算出される。仮測位結果群抽出部60により、仮測位結果のうち、特定の基地局を含まない基地局組に対応する仮測位結果が仮測位結果群として抽出され、ばらつき算出部62により、各基地局12を特定の基地局とする仮測位結果群のばらつきσが算出され、測位基地局設定部64により、ばらつきσが最も小さい仮測位結果群の特定の基地局とされた基地局12を除いて測位基地局が設定される。移動局位置算出部66により、測位基地局により構成される基地局組を用いた仮測位結果に基づいて、移動局10の位置が算出される。
(もっと読む)
衛星信号判定装置及び衛星信号受信装置
【課題】衛星の信号から得られる衛星の軌道情報の信頼性を高める。
【解決手段】異なる時点に取得した共通データ、前半データ、後半データのアルマナックデータ発行番号IODaの値が同じであることのみならず、異なる時点に取得した共通データ、前半データ、後半データの取得日の日付が同じであることも条件として、異なる時点に取得した共通データ、前半データ、後半データのアルマナックデータを正式に保存部9に保存するようにする。
(もっと読む)
位置算出方法及び位置算出装置
【課題】長期予測エフェメリスを用いて位置算出において、位置算出の正確性を向上させること。
【解決手段】予測対象期間毎に各GPS衛星の衛星軌道のパラメータ値と、当該衛星軌道の信頼性を示す指標値である予測軌道信頼度とが対応付けられた長期予測エフェメリスに定められた位置算出時点に対応する予測対象期間の予測軌道信頼度に基づいて、位置算出に使用するGPS衛星を決定する。そして、決定したGPS衛星から受信したGPS衛星信号に基づいて位置を算出する。
(もっと読む)
301 - 320 / 675
[ Back to top ]