
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
381 - 400 / 675
移動局測位システム
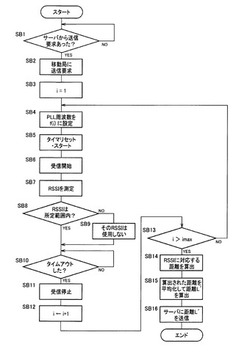
【課題】特定の周波数のノイズやマルチパスが生ずる場合であってもそれらの影響を低減することが可能な移動局測位システム8、およびその移動局測位システム8を構成する移動局10および基地局12を提供する。
【解決手段】受信強度測定部としてのRSSI測定回路82(SB7)によって測定された受信波強度値としてのRSSIのうち、周波数選択部84(SB8、SB9)によってRSSIの値が所定の受信波強度範囲(Rlow≦R≦Rup)となる周波数f(i’)が選択され、測位部96(SC3)により、周波数選択部84によって選択された周波数f(i’)の電波に対応するRSSIの値と、予め算出されるRSSIの値と移動局10および基地局12間の距離との関係とに基づいて、移動局10および各基地局12間の距離Lがそれぞれ推定され、推定された距離Lに基づいて移動局の位置(x,y)が算出される。
(もっと読む)
擬似距離評価システム及び擬似距離評価方法,プログラム

【課題】衛星測位システムでの測位計算の際にリアルタイムスムージング処理された擬似距離が異常値を示した場合に、この異常値の発生原因を迅速に特定する擬似距離評価システム及び擬似距離評価方法,擬似距離評価用プログラムを提供する。
【解決手段】測位計算に利用されるリアルタイムスムージング処理後の擬似距離から異常値を検出した場合に、この異常値と同一の観測時刻におけるポストプロセススムージング処理後の擬似距離が正常値であるか否か判定し、正常値であれば、検出した異常値の発生原因をリアルタイムスムージング処理の限界による残留ノイズであると判定するデータ処理部2を備えた。
(もっと読む)
情報処理装置、プログラム、情報処理方法、および情報処理システム
【課題】情報処理装置、プログラム、情報処理方法、および情報処理システムを提供すること。
【解決手段】建造物における一区画を示す区画情報、前記一区画に存在する無線端末における周囲の基地局から送信された無線信号の信号強度測定により取得される第1の測定情報、および前記基地局を識別する基地局識別情報、を対応付けて記憶している記憶部224と、任意の無線端末から、該無線端末における無線信号の信号強度測定により取得された第2の測定情報と、前記無線信号の送信元の基地局を示し、前記第2の測定情報の各々と対応付けられた基地局識別情報とを受信する受信部と、前記受信部により受信された前記基地局識別情報と対応付けられている第1の測定情報、および前記受信部により受信された前記第2の測定情報に基づいて、前記第1の測定情報のいずれかに対応付けられている区画情報を選択する選択部と、を備える情報処理装置。
(もっと読む)
データ送信装置、データ送信方法、データ送信プログラム、測位装置、測位方法及び測位プログラム
【課題】電子基準点が衛星から取得したデータから生成された補正データを用いて測位を行う場合に、電子基準点の切り替えに伴う測位結果の不連続性を回避することを目的とする。また、測位に使用する補正データのデータ送信量を低減することを目的とする。
【解決手段】データ送信装置101は、各電子基準点が衛星から取得したデータから上記各電子基準点に固有の誤差量を示す基準点固有誤差を計算する。データ送信装置101は、計算した上記各電子基準点の基準点固有誤差を補正データとして測位装置201へ送信するとともに、任意の1つの電子基準点の擬似距離と搬送波位相とを測位装置201へ送信する。測位装置201は、受信した補正データと、擬似距離と搬送波位相とに基づき、測位する。
(もっと読む)
E−UTRAN測定値を用いる無線指紋
システムが、無線ネットワーク内の多数のユーザ機器(UE)のロケーションポイントに関連付けられた地理上の位置を取得し、かつ、複数のUEによってロケーションポイントにおいて測定されるか、複数のUEに関連付けられたeNodeBによって測定される無線測定値と関連付けられた発展型ユニバーサル地上無線接続ネットワーク(E−UTRAN)無線指紋データを受信する。本システムは、クラスタ境界を形成するためにE−UTRAN無線指紋データ間の類似度に基づいてロケーションポイントをクラスタし、かつ、E−UTRAN無線指紋データを利用してUEの地理上の位置を将来決定するための、地理上の位置と、クラスタ境界と、E−UTRAN無線指紋データとをデータベースに記憶する。本システムは無線ネットワークにおいて第1のUEに関連付けられたE−UTRAN無線指紋測定データを受信すると共に、E−UTRAN無線指紋測定データに対応する地理上の位置の1つを取り出すためにルックアップ動作を実行してデータベースの中へ入れる。本システムは、第1のUE、緊急コールセンタや警察のコールセンタ、地理情報システム(GIS)サーバあるいは前記無線ネットワークの外部にあるノードのうちの少なくとも1つへ上記地理上の位置のうちの1つを送信する。 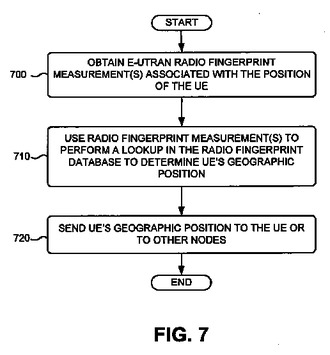 (もっと読む)
(もっと読む)
測位システム、位置情報送信機、通信端末、及び測位システムの制御方法
【課題】安定して確実に通信端末の現在位置を取得可能な測位システムを提供する。
【解決手段】位置を示す位置情報を含んだ位置情報信号を人工衛星2から送信される衛星測位信号と互換性を有する信号として送信する位置情報送信機100と、衛星測位信号を受信すると人工衛星2の位置を求めることにより自身の現在位置を求め、位置情報信号を受信すると位置情報に基づき自身の現在位置を求める通信端末200とを含む測位システム1において、位置情報送信機100から、通信端末200の各相関器を衛星測位信号又は位置情報信号のいずれを受信するように設定するかを決定する境界フラグ311を含む位置情報信号を送信し、通信端末200が、境界フラグ311に基づき相関器が衛星測位信号又は位置情報信号のいずれを受信するのかを設定するようにする。
(もっと読む)
センサ位置標定方法
【課題】 従来の技術によるセンサ位置標定方法では、センサネットワークを構成する全てのセンサの自己位置を決定するには、最初に少なくとも3個の位置が既知なセンサが必要であり、これらの位置が既知なセンサの位置は、センサにGPSを内蔵することで求めるか、あらかじめGPS等の位置測量器材を用いて求めた位置をセンサに入力しておくかが必要となる。しかし、前者の場合センサが大型で高価なものとなる問題があり、後者の場合は位置を測量してセンサに入力するのに手間がかかるという問題点があった。
【解決手段】 センサの設置時に、2個の位置が既知なセンサをセンサ設置領域の最外周に設置し、上記2個の位置が既知なセンサと位置が未知なセンサとの測距値から位置が未知なセンサの自己位置を求めるようにした。
(もっと読む)
仮想基準局の使用のサポート
【課題】仮想基準局に対して決定される信号測定値に基づく測位。
【解決手段】仮想基準局の使用をサポートするために、装置が、仮想基準局に有効なビーコン信号の仮想測定値を提供するよう求める要求を受信するとよく、この要求には、仮想基準局の所望の場所の表示が含まれる。本装置はさらに、上記の所望の場所を含む領域に関連するエンティティを決定することができる。本装置はさらに、決定されたエンティティへ前記要求を転送させることができる。
(もっと読む)
ハイブリッドSPS軌道データを用いた位置判定のための方法および機器
移動局が、衛星軌道データのハイブリッド合成を用いてその位置(または速度)および時間を判定するための方法およびシステム。一態様では、移動局は、確定点の判定において、ある衛星からの予測軌道データと、別の衛星からのリアルタイム軌道データとを合成する。合成は、同じまたは異なる衛星システム内の衛星に対して行うことができる。移動局は、ある期間におけるある衛星のリアルタイム軌道データ、および別の期間における同じ衛星の予測軌道データを用いることができる。別の態様では、移動局は、リアルタイム軌道データを用いて、予測軌道データ中のクロック・バイアスを補正することができる。クロック・バイアスへの補正は、リアルタイム軌道データを提供する同じ衛星にも、同じまたは別の衛星システム内の異なる衛星にも行うことができる。  (もっと読む)
(もっと読む)
測位装置、通信システム及び測位方法
【課題】測位時点での電波環境の影響による伝播誤りと伝播遅延の検知誤りの両方を考慮した上で、測位誤差を適正に補正し、測位結果の信頼性を向上させる。
【解決手段】測位サーバ10は、移動局が位置するエリアを推定する測位部14と、複数のエリアの各々について伝播誤り補正にて正解とされるエリアおよび当該正解とされる確率を記憶した伝播誤り補正情報記憶部19と、同一のセクタに属する複数のエリアにおいて伝播遅延誤り補正にて正解とされるエリアおよび当該正解とされる確率を記憶したPD誤り補正情報記憶部16と、上記の記憶部19、16から読み出した、複数回の測位結果より対応付けられる正解とされるエリアおよび当該正解とされる確率に基づき測位結果を補正する補正部12と、測位結果を出力する測位結果出力部13とを備える。
(もっと読む)
測位システム、基地局、及び移動局
【課題】ジッタによる測距への影響を低減し、測距精度を向上する。
【解決手段】測位システム8は、測距用電波信号を複数回送信する移動局10と、送信された測距用電波信号を受信する基地局12A〜Dと、予め算出された、受信信号の時間分散と受信信号強度との相関を格納保持した記憶部45とを有し、複数回の測距用電波信号の送信時に、各回の測距用電波信号が相関上において互いに異なる測定点となるように異点化処理し、基地局12A〜Dで複数回受信した測距用電波信号のうち、記憶部45に記憶された相関に応じて選択された測距用電波信号に基づき、移動局10から基地局12A〜Dまでの測距処理を行う。
(もっと読む)
位置検出システム
【課題】マルチパスなどの影響を低減することのできる位置検出システムを提供する。
【解決手段】複数の基地局12は、無指向性アンテナと指向性アンテナとを切り替えて機能するアンテナ部36を有し、複数の基地局12が無指向性アンテナで移動局10から送信される電波を受信した受信結果に基づいて移動局10の一次解位置を算出する一次測位部56(SC1〜4)と、基地局12の指向性アンテナをその利得が高い方向が一次解位置への方向となるように制御するアンテナ制御部35と、複数の基地局12がアンテナ制御部35によって制御された指向性アンテナで移動局10から送信される電波を受信した受信結果に基づいて移動局10の二次解位置を算出する二次測位部66(SC6〜9、SC14〜17)と、一次解位置と二次解位置とに基づいて移動局10の位置を算出する位置判断部68(SC10〜12、SC18〜21)とを有する。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
測位システム
【課題】ジッタによる影響を低減し、精度のよい測位を行う。
【解決手段】測位システム8は、電波信号を送受信する移動局10と、電波信号を送受信する基地局12A〜Dと、予め算出された、受信信号の時間分散と受信信号強度との相関を格納保持した記憶部45とを有する。移動局10は、測距用電波信号に先立ち調整用電波信号を送信し、基地局12A〜Dは、調整用電波信号の受信信号強度に応じて、上記相関に基づき、移動局10からの測距用電波信号の出力制御指示信号を送信し、移動局10は、出力制御指示信号に対応した出力値で測距用電波信号を送信する。
(もっと読む)
受信されたSPS信号の時間基準を入手するシステムおよび方法
本明細書で開示される主題は、衛星および/または地上ナビゲーション・システム内の送信機から受信される信号の時間基準を入手するシステムおよび方法に関する。受信機で第1送信機から受信される第1信号に関連する第1の時間基準が入手される。第2送信機からの第2信号に関連する第2時間基準が、第1の時間基準および受信機から第1送信機までの第1飛程と受信機から第2送信機までの第2飛程との間の推定された差に基づいて入手される。  (もっと読む)
(もっと読む)
時刻算出装置及び測位装置
【課題】外乱などの影響を受けることなく、ウィークナンバーが対応している期間を過ぎても正確な現在時刻を求めることができるようにする。
【解決手段】ガリレオ衛星からウィークナンバーの値を、GPS衛星のウィークナンバーとガリレオ衛星のウィークナンバーのオフセットとGPS衛星のウィークナンバーとガリレオ衛星のウィークナンバーの取得タイミングの違いを考慮し、GPS衛星のウィークナンバーのとりうる値の最大値で除算し、商と余りを求める(ステップS1)。求めた商の値によりGPS衛星のウィークナンバーの現在の周回数(0回、1回、2回、・・・など)を特定する(ステップ2)。ステップS1で求めた余りの数によりGPS衛星s1のウィークナンバーの新たな起点を特定する(ステップS3)。GPSからの受信信号に含まれている当該週の初めから現在までに何秒経過しているかの情報から現在の年月日時分秒を判断する(ステップ4)。
(もっと読む)
電離層補正値を算出するネットワーク及び方法
本発明は、電離層補正値を計算し、衛星ナビゲーションシステムのユーザに提供することを可能にするネットワークに関し、ネットワークが、
− 衛星(GNSS)によって伝送されたナビゲーション信号の遅延を計測可能な機上搭載のRF受信機(21)をそれぞれが備える複数の航空機(2)によって構成される航空ユーザセグメントと、遅延の前記測定値を地上セグメント(300)に伝送するための、複数の航空機(2)と地上セグメント(300)との間の航空データ通信手段(5)と、を備える航空セグメント(200)と、
− グリッドの計算に使用される遅延の計測値であり、複数の航空機(2)から及び複数の地上局(SBAS G)からもたらされる遅延の計測値を、地上セグメント(300)のレベルで受信する手段と、を有することを特徴とする。 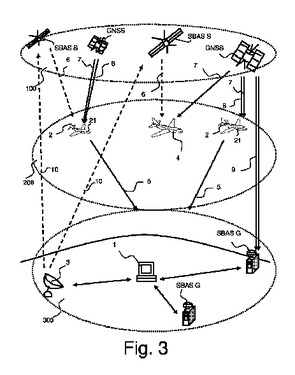 (もっと読む)
(もっと読む)
衛星航法/推測航法統合測位装置
【課題】慣性航法を行っているときでも、外部センサの検出値の補正が適正であるか否かを判定できるようにして、著しく劣化した測位結果が出力されるのを防止する。
【解決手段】航法装置100は、GPS受信機11、移動体の前後方向であるX軸方向と、移動体の左右方向であるY軸方向の少なくとも2軸の加速度を検出する加速度センサ12と、X軸方向及びY軸方向に対してそれぞれ直交するZ軸回りの方位方向の角速度を検出する少なくとも1軸の角速度センサ13を含み、CPU等からなる統合演算部30のセンサ検出値の適正補正判定部22は、X軸方向の加速度検出値を積分した値(速度)と、方位方向の角速度検出値の積とを求め、この値とY軸方向の加速度検出値との誤差を求め、この誤差が所定のしきい値を超えるか否かを判定することによって加速度センサおよび角速度センサの補正が適切であるか否かを判定する。
(もっと読む)
衛星ナビゲーションシステムのインテグリティのリアルタイム監視用の装置および方法
本発明は、衛星ナビゲーションシステムのインテグリティ(11)の表示を推定する手段を提供する計算装置であって、ナビゲーションシステムによって計算されたデータを測定することによって、非常に低確率のロケーションエラーに対してシステムのインテグリティ(11)の表示をリアルタイムで推定する手段を含み、これらの手段が
−ロケーションシステムによって計算されたデータを受信する手段、
−ロケーションエラーの分布モデル(H)を推定する手段、
−分布モデル(H)を特徴づけるパラメータを推定する手段、
−非常に低確率のロケーションエラーの分布のモデリングを可能にする分布モデルを特徴づけるパラメータの関数として極値理論を適用する計算手段、
−非常に低確率のロケーションエラーのためにインテグリティ(11)の表示をリアルタイムで推定する手段、
−リアルタイムでインテグリティ(11)の表示を送信する手段
を含むことを特徴とする計算装置に関する。  (もっと読む)
(もっと読む)
測位装置および測位推定方法
【課題】固定局の厳密な位置が不明で、かつ、移動端末や固定局の内部遅延時間が不明の場合において、これらを同時に推定し、測位装置の設置を簡便化することのできる測位装置および測位推定方法を得る。
【解決手段】複数の通信局(1、2)のそれぞれの位置およびそれぞれの局内部の通信処理に含まれる内部遅延時間を推定する測位装置であって、複数の通信局(1、2)に含まれる2つの通信局間の距離、および2つの通信局それぞれの内部遅延時間により定まる電波往復時間の測定結果に基づいて、複数の通信局に対する連立方程式を解くことにより、複数の通信局のそれぞれの位置およびそれぞれの内部遅延時間を推定する推定手段を備える。
(もっと読む)
381 - 400 / 675
[ Back to top ]