
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
621 - 640 / 675
位置補正装置および位置補正プログラムおよび位置補正方法

【課題】 ある地点の位置を実際に測定し、測定した地点が過去に作成した地図のどの位置にあるのかを表す。この場合、過去に地図を作成した時点と位置を測定した時点とでは、地殻変動などにより各地点の位置が変化している場合がある。そこで、測定した地点を過去の地図における位置に高精度に補正し、配置することを目的とする。
【解決手段】 位置補正装置630は、過去に作成した地図の基準点の位置から測定した時点の基準点の位置への移動量を算出する。位置補正装置630は、算出した移動量に基づき、移動量が等しい線を結んだコンター図などのグラフを生成するなどして、移動量から補正情報を生成する。生成した補正情報に基づき、測定した地点の位置を補正することで、測定した地点を過去の地図における位置に高精度に補正し、配置することが可能である。
(もっと読む)
GPS衛星シミュレーションシステム
GPS(Global Positioning System)衛星をシミュレートするシステムにおいて、GPS衛星からの航法データをリアルタイムに取得し、GPS衛星からの出力信号に合わせて時刻同期を行いながら、航法データからシミュレーション信号を生成し、その信号を評価対象のGPS受信機に向けて出力する。  (もっと読む)
(もっと読む)
補正値パラメータ生成装置、測位装置および差動衛星測位方法

【課題】 差動衛星測位方式による測位の精度を向上することを目的とする。
【解決手段】 基準補正値生成局200において、収集局210は各基準局100から観測値を収集する。生成局220は各基準局100から測位衛星400に向けた仰角に基づいて各基準局100毎に補正値時刻変化率を算出すると共に、観測値に基づく各基準局100座標と既知の各基準局100座標とに基づき基準補正値を生成する。通信局230は基準補正値と補正値時刻変化率とを補正値パラメータとして移動局300に送信する。移動局300において、通信機330は補正値パラメータを受信する。受信機310は測位衛星400の測位信号を観測する。複合部320は補正値を複合する基準局100を選択して補正値パラメータを複合し、複合した補正値パラメータで複合移動局用補正値を算出する。受信機310は観測値に基づく測位の際に複合移動局用補正値で補正して測位する。
(もっと読む)
ナビゲーション装置の初期位置決定方法
【課題】本発明は、移動通信端末機の位置決定方法に関し、特に、移動通信端末機の位置を決定する無線測位の誤差を改善することで、測位の正確度を向上させるためのGPS衛星の配置を利用した歩行者ナビゲーション装置の初期位置決定方法に関する。
【解決手段】本発明は、ナビゲーション装置の初期位置決定方法において、閾値以上のGPS信号の強度で受信されるGPS(Global Positioning System)衛星の数を算出するステップと、前記受信されたGPS信号から少なくとも2領域の何れか一つに位置するGPS衛星の数を算出するステップと、前記各領域でのGPS衛星の数を比較した結果に従い、初期位置を決定するステップとを含む。
(もっと読む)
マルチパス信号を用いて位置決めを行うためのシステム及び方法
RFの能動的か、受動的か、又は支援された位置確認アプローチのための信号処理技法である。該信号処理技法は、フィルタか又は推定器、例えば、非線形フィルタと共に、追加的な測定値としてマルチパス信号を利用する。前記フィルタは、インダイレクト及びダイレクトパス測定値か又は任意の他の利用可能な信号を使用して、観測可能なインダイレクトパスのパラメトリックモデルを構築する。1つか又は複数のダイレクトパス測定値が、(例えば、障害のせいで)その後、失われる場合には、インダイレクトパス測定値を用いて、人間か又は対象となる物体の位置の推定をフィルタが維持する。  (もっと読む)
(もっと読む)
順方向リンク中継器遅延ウォータマーク入れシステム
【課題】順方向リンク中継器遅延ウォータマーク入れシステム。
【解決手段】中継器情報を有する中継器信号をウォータマーク入れすることにより、中継器が存在する領域において、移動局の正確な位置の配置を可能にさせる、順方向リンク中継器遅延ウォータマーク入れ(FLRFWM)システムおよび方法。中継器は、信号が中継器を通過する全ての時間に、(ユニークまたは非ユニーク)時間遅延変調波形ウォータマークを有する順方向リンク信号をウォータマーク入れする。移動局は、AFLTおよび/またはA−GPSシステムを使用して位置の配置を決定するネットワーク位置決定要素または移動局位置の配置システムを支援する中継器情報を決定するために、順方向リンク信号上の時間遅延ウォータマークを検出しおよび/または識別する。 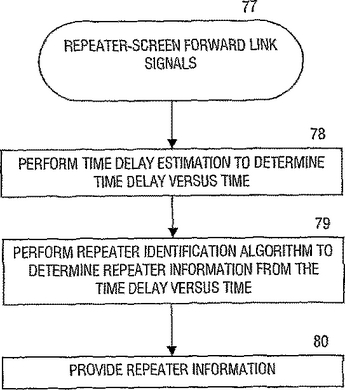 (もっと読む)
(もっと読む)
スプーフィングによる信号の矛盾の検出器
本発明は、スプーフィングの信号の矛盾の検出(SIDS)、すなわち、空間中の複数の地点で受信された信号の矛盾を利用してスプーフィングを検出することに関した方法および装置である。 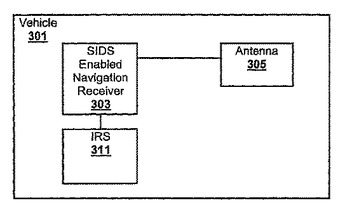 (もっと読む)
(もっと読む)
ナビゲーションシステムの予想性能の決定
一態様では、ナビゲーション補強システムの予測性能を決定する方法は、ナビゲーション補強システムの標準性能を決定すること、及び標準性能を決定することに基づいてナビゲーション補強システムの予測性能を決定することを含む。別の態様では、ナビゲーション補強システムの予測性能を決定するシステムは、ナビゲーション補強システムの標準性能を決定する長期モニタ及びナビゲーション補強システムの標準性能に基づいてナビゲーション補強システムの予測性能を決定する短期モニタを備える。 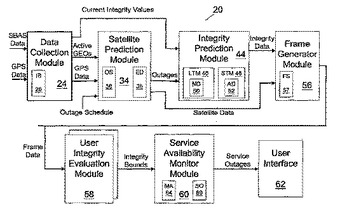 (もっと読む)
(もっと読む)
順方向リンク中継器周波数透かし入れシステム
中継器情報を有する中継された信号に透かしを入れることにより、中継器が存在する領域内の移動局の正確な位置決定を可能とする順方向リンク中継器周波数透かし入れ(FLRFWM)システムと方法。中継器は、信号が中継器を通過するときはいつも、(一意的または非一意的な)高速周波数変調波形の透かしで順方向リンク信号に透かしを入れる。移動局は、順方向リンク信号上の高速周波数透かしを検出および/または識別し、AFLTおよび/またはA−GPSシステムを用いて位置決定を行う際、ネットワーク位置決定エンティティまたは移動局の位置決定システムを支援する中継器情報を決定する。ここに説明する順方向高速周波数透かし入れシステムは、FL、AFLT、およびGPS特性への最小の影響と、良好な検出、識別および誤り検出確率と、検出/識別までの時間が短いことと、良好な検出/識別感度とを達成する。 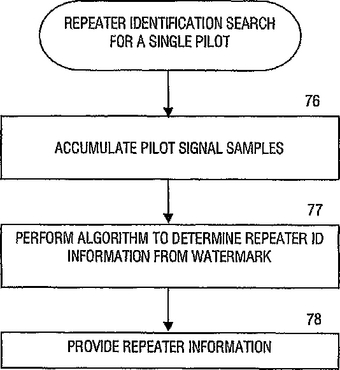 (もっと読む)
(もっと読む)
サイクルスリップ検出装置及びサイクルスリップ検出方法
【課題】効率的且つ確実にサイクルスリップを検出することが可能なサイクルスリップ検出装置及びサイクルスリップ検出方法を提供する。
【解決手段】人工衛星2aの過去におけるキャリア位相をn次の方程式により最小二乗近似し、これにより未来時刻におけるキャリア位相を推定し、推定されたキャリア位相と、前記の時刻におけるキャリア位相の実測値との差分を求め、この差分と所定の閾値とを比較し、差分が閾値より大である場合に別の人工衛星2bについても同様の処理を行う演算部8と、これにより求められた差分が閾値以下である場合にサイクルスリップが発生していると判定する判定部9とを設ける。
(もっと読む)
位置検出システム及び位置検出方法
【課題】受信器と集計ポイントの間が無線であるシステムの受信器に発信器及びMPUを付加した構成で、複数の発信器のうち任意の一つを集計ポイントとできるシステムを提供し、高精度位置検索を可能とするのが目的である。
【解決手段】 位置検出すべき対象物からの第一の信号をあらかじめ位置確認がなされた複数の位置で無線通信によって受信し、該第一の信号の信号強度レベルと複数の既知位置の受信器の属性情報を付加した第二の信号を、第二の信号を集計する集計装置で無線通信によって受信し、集計した第二の信号に含まれる第一の信号の信号強度レベルから対象物の位置を特定するシステムに関し、第二の信号を集計する集計装置の位置を任意に変えられることを特徴とする位置検出システム。
(もっと読む)
位置決定方法及び装置
本発明は、無線航法信号受信機の位置決定方法に関し、本方法は、複数の地上位置及び時間値について、無線航法信号源によって送出される信号の受信特性を、前記信号源の位置、電磁波伝搬モデル、及び各位置の環境の地形情報の関数として予測するステップ、受信機が無線航法信号を受信するステップ、受信機によって受信された信号の受信特性を測定するステップ、及び実際に測定された特性と予測特性とを処理して受信機の位置決定情報を供給するステップを含む。  (もっと読む)
(もっと読む)
携帯機器及び携帯機器制御プログラム
【課題】 迅速かつ適正に現在位置の緊急通報を行うことができるようにする。
【解決手段】 ユーザが緊急キーに対する操作を行うと(ステップS101;YES)、現在位置情報(緯度・経度)を取得する(ステップS103)。そして、このステップS103で取得した位置情報(緯度・経度)において、下5桁を表示部に表示させる(ステップS106)。しかる後に、緊急通報センターへの接続処理を行って、当該携帯電話を緊急通報センターに接続させる(ステップS107)。引き続き、合成音声キーが操作されたか否かを判断し(ステップS109)、操作されない場合には、マイクから入力された音声を緊急通報センターに送信する(ステップS109)。また、合成音声キーが操作された場合には(ステップS109;YES)、ユーザは表示部に表示された下5桁を音声合成して、緊急通報センター6に送信する(ステップS110)。
(もっと読む)
測位装置およびそれを用いる位置情報システム
【課題】 携帯電話の端末装置や携帯情報端末に組込まれるなどして、使用者によって所持され、GPS測位を行うとともに自律測位も併用するようにしたセキュリティ端末において、常に良好な測位結果を得られるようにする。
【解決手段】 GPS受信手段11およびGPS測位手段12によるGPS測位結果と、自律測位測位手段13による自律測位結果とを、制御手段15が選択的に採用して、無線通信手段14から通信ネットワーク2を介してセンター装置3へ送信するセキュリティ端末1において、前記制御手段15は、GPS測位を行う度に、GPS測位結果と自律測位結果とから、それぞれに予め設定されるエラー値判断基準に基づき、より正確と推定される方の測位結果を、前記自律測位手段13の初期位置に設定する。したがって、逐次更新され、しかもGPS測位結果をそのまま採用する訳ではなく、初期位置精度を向上できる。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】記憶容量の負担を最小限度に止めつつ、簡易な構成によってマルチパス頻発地域において精度よく測位することができる測位装置等を提供すること。
【解決手段】測位衛星12a等からの信号である衛星信号S1等を受信する測位装置20であって、マルチパス頻発地域の高度を示すマルチパス頻発地域高度情報を、複数の分割領域の高度情報として格納するマルチパス頻発地域高度情報格納手段と、衛星信号S1等を受信して、高度情報を取得するための高度情報取得用位置情報156を生成する高度情報取得用位置情報生成手段と、マルチパス頻発地域高度情報格納手段から、高度情報取得用位置情報156に対応する分割領域の高度情報155cを取得する高度情報取得手段と、衛星信号S1等及び高度情報155c(158)に基づいて、現在位置を示す高度情報使用現在位置情報160を生成する高度情報使用現在位置情報生成手段と、を有する。
(もっと読む)
潮位監視システム,潮位監視システム用の海上ブイ及び地上局装置、潮位監視方法、潮位監視プログラム
【課題】 所定の海域における海面の上下動を検出し、その解析により津波,高潮等の潮位異常を検出するようにした潮位監視装置,潮位監視方法及び潮位監視プログラムを提供する。
【解決手段】 所定海域の海面上に分散配置してアンカーにより係留され、海面高さを測定する測定部と、この測定部で測定された測定値を測定時刻と共に送信する通信部と、を有する複数個の海上ブイ100と、地上の所定箇所に配置され、各海上ブイの通信部から送信されてくる測定値及び測定時刻を受信する通信制御部と、上記通信制御部で受信した各海上ブイからの測定値及び測定時刻に基づいて、上記所定の海域における海面の上下動を解析し、潮位の異常を検出すると共に、各海上ブイの位置情報を参照して、潮位の異常の移動方向及び移動速度を算出する潮位解析部と、を有する地上局装置200と、を設ける。
(もっと読む)
データフィルタ、データフィルタリング方法、データフィルタリングプログラム、測位装置、測位方法および測位プログラム
【課題】 精度の高い擬似距離を選択して測位計算できるようにする。
【解決手段】 測位装置10は、GPS受信機2とGISデータベース3と観測データフィルタ5と航法計算装置6とを備えて測位計算を行う。観測データフィルタ5は、GPS受信機2から各衛星に対する擬似距離と衛星位置とを入力し、さらに、GISデータベース3から建物などのGISデータを取得する。次に、自己位置と衛星位置と建物との位置関係に基づいて各衛星からの測位信号が直接波か反射波か判定する。そして、直接波である測位信号から求めた擬似距離を測位計算に使用する擬似距離として出力する。また、反射波に対して測位計算における重みを設定して出力する。航法計算装置6は、観測データフィルタ5が出力した擬似距離および擬似距離の重みに基づいて測位計算を行う。
(もっと読む)
歩行者ナビゲーション装置、歩行者ナビゲーション方法及びプログラム
本発明の歩行者ナビゲーション装置(10A)は、現在位置情報をGPS(20)から獲得する位置情報受信部(12)と、受信した現在位置情報を解析して現在位置を算出する位置情報解析部(13)と、地図情報を記憶するMAPDB(14)と、マルチパスの影響を制御するためのマルチパス制御距離を指定するマルチパス制御部(17)と、位置情報解析部(13)で算出した現在位置と、MAPDB(14)に記憶されている地図情報と、マルチパス制御部(17)で指定されたマルチパス制御距離とに基づいて、現在位置表示情報を算出する中央処理部(11)と、現在位置表示情報を表示する表示部(15)と、距離指定値や経路検索条件の入力及びナビゲーション開始指示を行う入力部(16)と、を備える。 これにより、マルチパスの影響を適宜補正して正確に歩行者の経路をナビゲーションすることができる歩行者ナビゲーション装置を提供する。 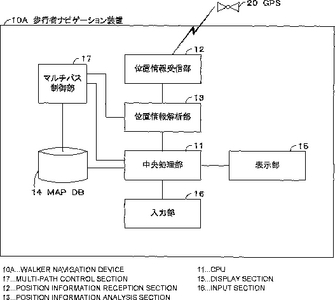 (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】 測位誤差の補正精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、GPS受信機2による今回の測位タイミングにおける測位位置が含まれる予測誤差範囲を設定する誤差範囲設定部12と、今回の測位タイミングにおいてGPS受信機2から出力された実際の測位位置が予測誤差範囲に含まれるときに実際の測位位置を用い、実際の測位位置が予測誤差範囲に含まれないときに、実際の測位位置と予測誤差範囲との相対的な位置関係に基づいて測位位置の補正を行う相対位置判定部14および位置補正部16とを備えている。
(もっと読む)
位置決定におけるアンビギティーの解決方法
【課題】ノイズの有無にかかわらず環境における位置決定におけるアンビギティーを解決するための様々なヒューリスティック技術を使用する方法を提供すること。
【解決手段】最終的な位置決定解は、複数の曖昧な位置決定解から、クロック時間バイアス値を使用することにより、到着時間、そして/または、測距信号の受信電力レベルなどの測距信号順序に関する一貫性情報を使用することにより、ソースに距離を使用することにより、そして/または、最終的な位置決定解を選択するのに他の弁別器機能を使用することによって、1組の曖昧な位置決定解から決定しても良い。ヒューリスティックなアプローチの主要な利点は、余分な測定が位置決定解のアンビギティーの解消に必要でないということである。
(もっと読む)
621 - 640 / 675
[ Back to top ]