
Fターム[5J062DD24]の内容
Fターム[5J062DD24]に分類される特許
181 - 200 / 225
位置算出装置の進行角決定方法
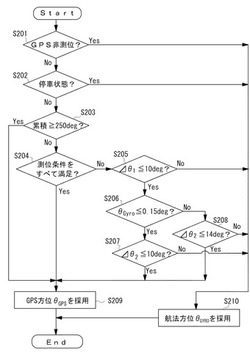
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
屋内における高精度位置基準測定のための方法及び装置
本発明は、実用的な高精度屋内測位結果の生成を実現する。測位サーバは通常のユーザが自身の携帯電話を用いて接続することのできるインタフェースを提供する。このインタフェースを用い、ユーザは、セルラオペレータが高精度位置基準測定の実行を希望する複数の屋内位置から1つを選択することができる。ユーザはその屋内位置に移動し、上述のインタフェースを操作して基準測定をその場所で開始する。ユーザのID又は測位時刻のログを取ることにより、選択された屋内位置をRANで決定されたタグと相互に関連付けることが可能である。タグと、測位サーバへ向かうインタフェースを用いて選択されている屋内位置とは、1つのタグづけされた高精度測位結果を構成する。 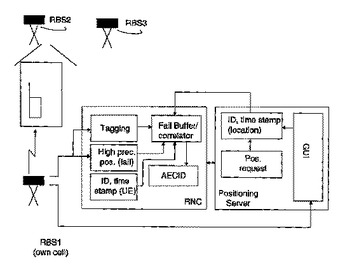 (もっと読む)
(もっと読む)
測位システムおよび端末

【課題】GPS測位において、個々の衛星が配信する補正情報の量を増やさずに、端末での補正の精度を向上させること。
【解決手段】本発明に係るGPS補正情報配信システム100では、複数の補完衛星51〜53から端末60に、地理的あるいは時間的に補完関係を有する補正情報を配信する。これにより、個々の補完衛星が配信する補正情報の量を増やさずに、端末60におけるGPS測位の補正の精度を向上させることができる。
(もっと読む)
GPS受信装置
【課題】指向性の設定処理を単純化して高速な追従処理を実現する。
【解決手段】指向性を変更可能な複数のアンテナ部と、複数のアンテナ部の各々に受信された複数のGPS信号に基づいて自己の現在位置を算出する自己位置算出手段と、自己の向きを算出する向き算出手段と、算出された現在位置、向き、及び、受信されたGPS信号に基づいて、自己に対して各GPS衛星が位置する方向を算出する衛星方向算出手段と、衛星方向算出手段により算出された方向に基づいて、複数のアンテナ部の各々がそれぞれ異なる一機のGPS衛星に対して指向性を持つよう設定する指向性設定手段とを備えたGPS受信装置を提供する。
(もっと読む)
車両位置推定装置及び車両位置推定方法
【目的】GPS受信データより得られるGPS位置及びGPS速度を用いて、GPS受信情況が悪くなっても車両位置を正しく推定して表示する「車両位置推定装置及び車両位置推定方法」を提供することである。
【構成】GPS衛星より受信したGPS受信信号より算出されるGPS位置に基づいて車両位置を推定する車両位置推定装置において、(1)車両の進行方向履歴を進行方向履歴保存部に保存し、(2)GPS位置とGPS速度とGPS進行方向とから次の位置測定時刻における車両位置と車両が存在する可能性のある位置範囲を予測し、(3)GPS位置が前記予測位置範囲内に存在すれば該GPS位置を現在位置とみなし、(4)予測位置範囲内に存在しなければ、予測位置を現在位置とみなすと共に、該現在位置とGPS速度と保存されている車両進行方向とから次の車両位置と車両位置範囲を予測する。
(もっと読む)
測位システム及び測位方法
【課題】屋内、交通機関の車両内、屋外における高層ビル間、または狭い路地における場所等においても自位置をより正確に測位することが可能な、測位システム及び測位方法を提供する。
【解決手段】測位システム100は、当該測位システム100の自位置に関する位置情報を含む、互いに異なる生成方法により生成された測位情報を取得する取得部20と、取得部20により取得された複数の測位情報に基づいて、自位置を決定する決定部30と、測位情報を生成する複数の測位部10,11,12とを備え、取得部20は、複数の測位部10,11,12各々により生成された測位情報を取得し、決定部30は、取得部20により取得された複数の測位情報に基づいて、自位置を決定する。
(もっと読む)
衛星ナビゲーションの方法、及び、拡散スペクトラムソフトウェア受信機
提案されたスペクトラム信号受信機は、少なくとも、その一部がプロセッサ上で作動するソフトウェアで実装されている無線信号処理部を含む。信号処理部は、利用可能性がある信号源(S1〜S9)のグループのうちの信号源からなる、ある数の候補サブセットの各々に基づいて、位置/時間関連データを生成するのに必要な処理要求量を推定するように適合されている。各候補サブセットは、少なくとも、所望の品質の位置/時間関連データを生成するのに必要な、最小の数の信号源を含む。さらに、処理部は、受信機の後続の動作期間における処理要求量の見積もりのうち、最小のものと関連づけられた候補サブセットに基づいて、利用可能性がある信号源(S1〜S9)のグループのうち、好ましい信号源のセットを選定するように適合されている。次に、後続の動作期間において、受信機は、選定された信号源のセットから、拡散スペクトラム信号を受信し、受信した信号に基づいて、位置/時間関連データを生成する。  (もっと読む)
(もっと読む)
移動体のナビゲーション装置及び移動体の現在位置算出方法
【課題】 マルチパスの影響を排除することで、より高い精度で現在位置を検出することが可能な移動体のナビゲーション装置及び移動体の現在位置算出方法を提供する。
【解決手段】 ナビゲーション装置10を備える車両の現在位置算出方法として、車両の現在位置を検出するための自律航法センサ5と制御部17とからなる自律測位手段が新たに算出した自律測位データの誤差範囲を、新たな現在位置の予測エリアデータとして算出するステップと、車両の現在位置を検出するためのGPS受信部4が新たに算出したGPS測位データが、予測エリアデータに含まれるかどうかを判定するステップと、GPS測位データが予測エリアデータに含まれないと判定した場合に、自律測位データを利用して現在位置を示す現在位置データを新たに算出するステップとを有する。
(もっと読む)
無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラム
【課題】屋内外を移動する移動体の測位をGPS測位と無線LAN測位とを併用して行うにあたって、リアルタイム処理を可能とし、屋内外で連続して測位できる無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラムを提案する。
【解決手段】ある時点の融合結果の計算には、それ以前の無線LAN測位の結果、GPS測位の結果、及びGPS測位に付随して得られるDOPのみを使用することによりリアルタイム処理を可能にした。また、「無線LAN測位の結果とGPS測位の結果の重み付き平均」に替えて、理論的根拠が明確な重みを用いた重み付き平均を採用した。
(もっと読む)
他車両位置検出装置
【課題】 他車両の位置をすばやく検出することができる他車両位置検出装置を提供する。
【解決手段】 通信部1を介して受信した自車両におけるGPS座標と、マップマッチングによって算出された自車両における補正後の位置座標との差をGPS誤差として算出し、該GPS誤差を用いて、他車両から取得したGPS座標の補正を行うことによって他車両の正確な位置を算出するものとしたので、他車両からGPS座標を取得すると、あらかじめ算出されたGPS誤差を用いて即座に他車両のGPS座標の補正を行い他車両の位置を検出することができる。
(もっと読む)
GPS位置決定を判定する方法およびそのGPSレシーバ
GPS位置決定を判定する方法が提供され、方法は、(i)受信したGPS信号をサンプリングし、これらサンプルを記憶するステップと、(ii)これらGPS信号サンプルの予備処理を行い、後のこれらGPS信号サンプルの最終的な処理の間に、位置決定を得ることができる可能性を判定するステップと、(iii)ステップ(ii)の後に、これらGPS信号サンプルの最終的な処理を行い、位置決定を得るステップと、を備える。  (もっと読む)
(もっと読む)
測位装置
【課題】 衛星からの受信信号が、反射波のみ、または直接波と反射波が混ざった状態である状況において、その状況に応じて測位計算に使用する衛星を選択したい。
【解決手段】 測位精度指標判定部72は、受信したGPS衛星の位置とGPS衛星距離とが対応付けられたデータをGPS衛星距離計算部22から取得する。衛星信頼性判定部74は、受信信号強度測定部60から各GPS衛星の受信信号強度を取得し、衛星信頼性度数を判定する。測位精度指標判定部72は、衛星信頼性度数がαより高いGPS衛星の組合せでDOP値を計算する。また、測位精度指標しきい値、計算したDOP値とを比較することによって、測位に使用すべきGPS衛星の組合せを選択する。
(もっと読む)
既知の外部信号を用いて通信システム内の位置検出ユニットを同期化する時刻同期化システム及び方法
【課題】専用回線、ネットワーク、または高価なGPSレシーバを用いずに、位置検出ユニットのローカルクロックを同期させる時刻同期システムを提供。
【解決手段】位置検出ユニット120a,bのそれぞれは、既知の地理的な場所に位置する送信機110から高周波(RF)信号115を受信してRF信号を計測し、受信したRF信号の個々の計測値と、位置検出ユニットのローカルクロックのそれぞれと実質的に同一時刻において記録された、計測値の個々のタイムスタンプとを生成する。コントローラ150は、タイムスタンプ及び計測値を使用して位置検出ユニット間の実測TDOAを判定し、実測TDOAと予測TDOA間の差から位置検出ユニット間の時刻同期誤差を演算し、位置検出ユニットのそれぞれに対して個々の時刻調節値を供給して時刻同期誤差をオフセットする。
(もっと読む)
無線装置
【課題】 測位地点の周辺環境の影響やGPS衛星の配置の影響等によって、測位座標点が、真の座標点に対してオフセット値を有する場合であっても、また、無線装置が、移動状態である場合であっても、十分な測位精度で当該無線装置の存在位置を決定する。
【解決手段】 本発明に係る無線装置30は、位置情報を取得する位置情報取得部31と、取得した位置情報についての推定誤差値を取得する推定誤差値取得部33と、無線装置の移動状態を決定する移動状態決定部34と、取得された推定誤差値と決定された移動状態とに基づいて、無線装置の存在位置を決定する位置決定部36とを具備する。
(もっと読む)
ナビゲーション装置
【課題】 自立航法用センサからの距離情報を利用できない場合であっても、自車位置を精度良く算出することができる「ナビゲーション装置」を提供する。
【解決手段】 ナビゲーション装置における自車位置の更新方法は、自立航法センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位によるGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図上の道路上にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
(もっと読む)
現在位置算出装置
【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
(もっと読む)
位置測位装置を有する移動体情報端末
【課題】場面に応じて必要とする測位精度の測位部を選択できるようにする。
【解決手段】高精度の第1測位部21と第1測位部よりも精度の劣る第2測位部22とを切替部24が切り替え、切り替えられた測位部が測位する。切替部24は、選択判定部34が出力する判定信号に従って切り替える。判定条件記憶部32は、判定条件として、移動体情報端末が装備された移動体の速さと所定の設定値との大小関係を示す判定条件式を記憶している。判定条件設定部33は、前記判定条件式を用いて判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は、前記判定条件信号を入力し、また、車速検知部90から前記移動体の速さを入力し、入力した速さが前記設定値以下のときは第1測位部を選択するべき判定を行ない、入力した速さが前記設定値よりも大きい場合には第2測位部を選択するべき判定を行ない、判定結果を判定信号として出力する。
(もっと読む)
IP及びVOIPデバイスの位置を求めるシステム及び方法
汎用IPネットワーク接続デバイスの位置を正確に特定する方法及びシステム。本方法は、戦略的ネットワークポイントに配置されるリモートインテリジェンスを使用して、関連補助データを受信機内蔵IPデバイスに配信する。補助手段を調整して、物理タイミング、周波数及び時刻信号ステータスデータを、汎用ブロードバンド通信プロトコルを使用して供給する。関連補助データによって、信号処理利得による補償が可能になる。信号処理利得は、微弱な又は歪んだ建物内のGNSS信号を獲得及び測定し、更に最終的に対応する疑似距離時刻成分を抽出するために必須である。本方法では、長期間に渡って観測される一連のGNSS測定値を標準の衛星航法方式を使用しながら収集し、一旦、これらの測定値が蓄積されると、標準の方式を使用して、各疑似距離を、正確な地理的位置を既知の確度で計算するために使用される利用可能な経路距離に変換する。  (もっと読む)
(もっと読む)
位置推定装置および位置推定方法
【課題】 情報を有効に利用しつつ、他のデバイス情報を用いることなく、実際の状態との整合率の高い位置推定手段を提供する。
【解決手段】 位置推定装置10は、情報取得部12、情報記憶部18、演算処理部20を備える。情報取得部12は、情報から移動体の位置情報を取得する位置情報取得部14と、誤差情報を取得する誤差情報取得部16とを備える。情報記憶部18は、位置情報取得部12から送られた位置情報と誤差情報をその測定時刻ごとに記憶する。演算処理部20は、位置情報取得部12からの位置情報と誤差情報とから位置を推定する。移動体の単位時間あたりの移動エリアを推定する第1ステップと、移動体の現在における存在エリアを推定する第2ステップ、移動体の現在における位置を推定する第3ステップが、位置推定装置の演算処理部20によって順次行われて移動体の位置を推定する。
(もっと読む)
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。ある場合には、データは、パラメータの変化に対して調節されることができる。特に遠隔構成要素により提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。  (もっと読む)
(もっと読む)
181 - 200 / 225
[ Back to top ]