
Fターム[5J062DD24]の内容
Fターム[5J062DD24]に分類される特許
161 - 180 / 225
無線測位システム
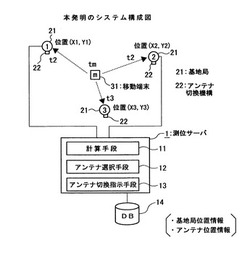
【課題】移動する移動端末から発せられた電波を複数の基地局で受信して当該移動端末の位置を求める無線測位システムに関し、基地局の数が少ない状態で、広範囲で死角の少ない移動端末の測位を行うと共に、少ない基地局ながら、最適なアンテナを選択することにより必要精度に応じた測位を可能にすことを目的とする。
【解決手段】複数のアンテナを有すると共に、複数のアンテナを切り換える切換機構を設けた基地局を複数設けて各基地局から、移動端末からの電波を受信したときに時刻をそれぞれ通知を受け、通知を受けた時刻をもとに移動端末の位置を計算する計算手段と、時刻をもとに移動端末の位置を計算できないときあるいはできたときに、基地局に他のアンテナに切換指示を送信し、移動端末から電波を受信した時刻を受信して計算する手段に再計算させるアンテナ切換手段とを設けた測位サーバとを備える。
(もっと読む)
車載用ナビゲーション装置及びその制御方法

【課題】GPS受信手段を二系統用いる簡明な手法で自車位置判定の精度を効果的に向上させるカーナビゲーションの技術を提供すること。
【解決手段】切替手段88は、2つのGPS受信機による測位精度が所定基準以上に良好で、かつ、第1の自車位置情報と第2の自車位置情報の位置同士が所定範囲内に近接し、かつ、この所定範囲内に道路情報(例えば道路リンク)が存在しない場合に、マップマッチングの結果に代えて、第1の自車位置情報と第2の自車位置情報の平均値(位置及び方位)を算出して自車位置として採用する(切替処理)。
(もっと読む)
位置検出サービス品質インディケータ
移動体ワイヤレス・デバイスは、位置検出に基づくサービスによって用いるために、計算した位置検出推定値の品質を示す位置検出サービス品質インディケータ(QoSI)を供給するように構成されている。QoSIは、デバイス自体によって、または位置検出対応サーバ(LES)のようなサーバによって計算することができる。QoSIは、予測位置検出精度、可用性、レイテンシ、精密度、および/または歩留まりを表すために用いることができる。 (もっと読む)
統合型移動端末ナビゲーション
セルラ通信ネットワークの1以上の同期していない地上送信源102〜105からの信号を受信するための送信源受信機204と、衛星測位システムの衛星107〜110からの信号を受信するための衛星測位受信機200とを備えた移動端末100を含むナビゲーションシステムが提供される。端末100はクロック208も含む。プロセッサ209は、各値が受信機200、204によって生成された測定値を表している斯かる値のリストと、端末クロックのバイアスとを有する測定値ベクトルを取得する働きをする。プロセッサ209は、動的ナビゲーションソリューションを得るために、システムの現状態を表す状態ベクトルを、以前に決定された状態ベクトルと、測定値ベクトルと、動的モデルとを使って計算する。状態ベクトルは、その成分として少なくとも、(a)端末100の1次元以上の位置情報と、(b)同期していない地上送信源102〜105に付随するクロックの所与の時間に関するバイアスの表現と、(c)端末クロック208のバイアスと、(d)(a)乃至(c)の成分に関連する誤差を示すクォリティ指標と、(e)(a)乃至(c)の成分の他の成分に対する依存度を示す相関指標とを含む。 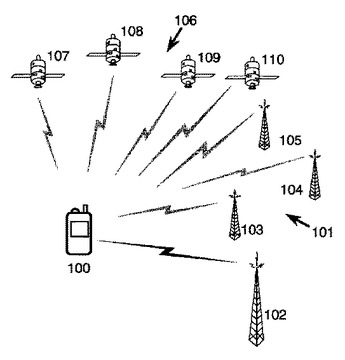 (もっと読む)
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マルチパス波の影響を低減するとともに、各送信局の配置の偏りによる測位計算の精度の低下を低減し、従来技術に比較して高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マスク処理部23と、位置及び速度算出器22と、マッチング部35とを備える。マスク処理部23は、受信無線信号に基づいて、ナビゲーション装置10の進行方向に対する各GPS衛星の相対方位と、各GPS衛星の仰角とを算出し、算出された相対方位及び仰角に基づいて当該各GPS衛星を測位算出に使用しないようにマスクする。位置及び速度算出器22は、マスクされない各GPS衛星から受信した無線信号に基づいて自車位置を算出する。マッチング部35は、所定の地図データと、速度ベクトル算出器33により算出された速度ベクトルと、位置及び速度算出器22により算出された自車位置とに基づいて現在位置を特定する。
(もっと読む)
プログラム、測位回路及び電子機器
【課題】マルチパス環境における測位誤差を考慮に入れた、より高精度な測位を実現する
こと。
【解決手段】捕捉したGPS信号に基づいて4つの補正衛星の組合せである衛星組合せが
抽出され、各衛星組合せそれぞれについて、当該衛星組合せを用いた場合の現在位置が計
測される。そして、抽出された衛星組合せのうち、前回最適組合せと判定された衛星組合
せが選定組合せとして選定され、当該選定組合せについての計測結果がマップマッチング
処理部に出力される。そして、抽出された衛星組合せそれぞれの計測結果と、マップマッ
チング処理部から入力されたマップマッチング結果である位置情報とに基づいて、マップ
マッチング結果に最近接する計測結果となった衛星組合せを今回の最適組合せとして判定
する。
(もっと読む)
低高度地球軌道衛星2機を用いた受動的位置決定
【課題】低高度地球軌道衛星2機を用いた受動的位置決定法を提供する。
【解決手段】ユーザー端末と、既知の位置と既知の速度とを有する少なくとも二つの衛星と、衛星を介してユーザー端末と通信するためのゲートウェイ(すなわち地上基地局)とを含む。方法は、範囲差パラメタと範囲レート差パラメタとを決定する工程を含む。範囲差パラメタは(1)衛星のうち最初のものとユーザー端末との間の距離と(2)衛星のうち2番目のものとユーザー端末との間の距離との差を表す。範囲レート差パラメタは、(a)衛星のうち最初のものとユーザー端末との間の相対半径方向速度と(b)衛星のうち2番目のものとユーザー端末との間の相対半径方向速度との差を表す。地球表面上でのユーザー端末の位置を衛星の既知位置と既知速度と、範囲差パラメタと、範囲レート差パラメタに基づいて決定する。
(もっと読む)
自車位置決定装置
【課題】自律航法では誤差が大きく、GPSデータが信頼できるときには、素早くGPSデータを利用して正確な自車位置を得ることができる「自車位置決定装置」とする。
【解決手段】GPS受信信号により自車両の位置と進行角を検出するGPS位置進行角検出部と、ジャイロと車速データにより自車両の位置と進行方位を検出する自律航法位置方位検出部と、GPS位置進行角検出部と自律航法位置方位検出部により自車両の位置と進行方位を決定する自車位置方位決定部と、自車位置方位決定部で決定した自車両の位置を地図の道路に一致させるマップマッチング部と、GPS位置進行角検出部で検出したデータの信頼性を判定するGPS信頼度判定部とを備え、自車位置方位決定部では、マップマッチング処理が行われないとき、GPS信頼度判定部でGPSデータに信頼性があると判定したときには、GPS位置と進行角により自車両の位置と進行方位を決定する。
(もっと読む)
位置情報処理装置及び位置情報処理方法
【課題】ユーザ及び端末装置の訪問場所を精度良く抽出する位置情報処理装置及び位置情報処理方法を提供する。
【解決手段】位置情報処理装置20は、位置測位端末10の位置情報に基づいて、位置測位端末10の位置が屋内か屋外かを判定した判定結果と、位置測位端末10の位置情報と、位置測位端末10を一意に識別する端末識別情報とを受信する位置情報受信部21と、位置情報と位置情報に対応する場所の名称とを関連づけて保持する場所情報データベース23と、位置情報受信部21によって受信された判定結果が屋内である場合、場所情報データベース23を参照し、位置測位端末10の位置情報に基づいて、位置測位端末10の存在する場所の名称を抽出する訪問場所抽出処理部22とを備える位置情報処理装置。
(もっと読む)
位置データ取得装置
【課題】取得した現在地の位置データを的確に補正する。
【解決手段】ユーザ携帯電話2のシャッタボタン6を操作すると、制御部3は、撮影を行うとともに、GPS算出部8にプログラム起動信号を出力し、GPS算出部8は、ユーザ位置データを算出する。そして、制御部3は、アンテナ7を介して、ユーザ携帯電話2の外部に向けて位置データ取得指令信号を発信する。現在地の位置データを取得する機能を有する第1,第2周辺携帯電話11,12は、位置データ取得指令信号を受信すると、得した第1,第2周辺位置データを第1,第2取得データ信号に変換して外部に向けて発信する。アンテナ7で第1,第2取得データ信号を受信すると、制御部3は、第1,第2周辺位置データとユーザ位置データとの平均値を算出し、算出した平均位置データを撮影した画像データに記憶した後、画像データをメモリ9に記憶する。
(もっと読む)
CBOC拡散波形により変調された無線ナビゲーション信号を受信する方法および受信機
【課題】GPSとガリレオシステムとの間の相互運用性および適合性を保証すること
【解決手段】BOC(n1、m)成分およびBOC(n2、m)成分(n1とn2とは異なる)の実数値の係数のリニアな組み合わせを含む複合波形によって変調された無線ナビゲーション信号を受信するために、長さTの時間インターバルにわたり、ローカル波形と前記複合波形との間の相関化を実行する。前記ローカル波形は少なくとも1つのBOC(n1、m)波形セグメントと少なくとも1つのBOC(n2、m)波形セグメントとを含む、交番系列波形により前記時間インターバルにわたって形成される二進波形であり、前記少なくとも1つのBOC(n1、m)セグメントは、αtの全時間長さを有し、αは厳密に0と1との間にあり、前記少なくとも1つのBOC(n2、m)セグメントは、(1−α)Tの全時間長さを有する。
(もっと読む)
測位装置、ナビゲーションシステム
【課題】より精度よく測位した位置を補正し、マップマッチングした場合でも非連続な走行軌跡となることが低減される測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段1により移動体の位置を検出する測位装置10において、移動体の挙動情報を検出する自律センサ2、3と、電波航法測位手段1による測位位置に自律センサ2,2による検出情報を累積して自律航法測位位置を検出する位置検出手段と、を有し、位置検出手段は、測位位置又は自律航法測位位置のいずれか、及び、過去の自律航法測位位置の履歴に基づき予測した予測位置に基づき、移動体の位置を推定することを特徴とする。
(もっと読む)
位置検出装置及び位置検出用プログラム
【課題】車両の位置検出システムとしての冗長性(対故障性)を向上させつつ、より正確な位置検出が可能な位置検出装置及び当該位置検出用のプログラムを提供する。
【解決手段】一つの車両の位置を示す位置情報を、相互に異なる位置検出条件の下で夫々生成する二つのGPSセンサ11及び12と、各GPSセンサ11及び12により生成された各位置情報夫々における位置検出精度につき、当該位置検出精度が高い方の位置情報を用いて車両の位置を算出する位置検出部2と、を備える。
(もっと読む)
衛星測位装置
【課題】ハードウエア規模の増大およびそれに伴う消費電力の増加を軽減することができる衛星測位装置を提供する。
【解決手段】制御部9は、捕捉しているGPS衛星の中から除外対象のGPS衛星を選択し、選択したGPS衛星を捕捉対象から除外して、捕捉しているGPS衛星がない領域に存在するGPS衛星を捕捉するように逆拡散処理部3a,3b,・・・を制御する。
(もっと読む)
運行監視システム
【課題】所定の経路を通行する移動体の位置をGPS測位によりそのまま表示すると、所定の経路を外れた運行軌跡が発生する。
【解決手段】
登録地点定数記憶部14は、運行経路上の所定の地点の識別番号と、当該地点を含む所定の領域を表す緯度経度情報を対応させた登録地点エリア情報を記憶し、登録地点通過判定処理部15は、前記登録地点エリア情報を参照し、移動体11のGPS受信機13により測定された緯度経度情報が、前記登録地点エリア情報のいずれかの領域内である場合は、当該領域に対応する前記所定の地点を当該前記移動体が通過したと判断し、前記GPS受信機13により測定された緯度経度情報を、当該前記所定の地点の識別番号に変換し、送信部11により前記識別番号を基地局12に送信する。基地局12では、受信された前記識別番号をもとに端末画面上に前記移動体11の運行位置情報を表示する。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】信号強度が極めて微弱な弱電界下においても、受信した測位基礎符号の位相を精度良く特定することができる測位装置等を提供すること。
【解決手段】発信源から複数の基礎単位で構成される測位基礎符号を受信して、現在位置を測位する測位装置であって、基礎単位によって規定される位相範囲を等間隔において少なくとも3つに分割した位相幅である第1分割位相幅ごとの位相である第1サンプリング位相CS1において、測位端末20において生成したレプリカ測位基礎符号と測位基礎符号との相関処理を行って相関値を算出する第1相関値算出手段と、最大の相関値に対応するサンプリング位相CS1である第1測位位相CP1を特定する第1測位位相特定手段と、3個以上の前記発信源に対応する第1測位位相CP1に基づいて、現在位置を測位して測位位置を算出する第1測位位置算出手段と、を有する。
(もっと読む)
情報処理装置及び補正値複合方法及びプログラム
【課題】差動衛星測位方式による測位の精度を向上することを目的とする。
【解決手段】補正値生成局200において、基準局通信局210は各基準局100から観測値を収集する。生成局220は各基準局100の観測値を基に各基準局100の補正値を生成する。さらに複数種設定した基準局の組合せに対して、その組合せ内で各基準局の補正値を比較して基準局に依存する異常値を検出し除去する。さらに生成局220は、異常値が除去された補正値をその組合せ内で複合して高品質な複合補正値を生成する。移動局300または補正値生成局200は、移動局300の概略位置を囲むような基準局の組合せを抽出する。その組合せリストの中から、過去にその移動局300に対して配信した複合補正値の基準局組合せと比較して閾値以下の数だけ異なる基準局組合せを選択する。その複合補正値を移動局300に配信する。
(もっと読む)
地図評価装置および地図評価方法
【課題】ナビゲーション装置等で用いられる地図データの信頼度を評価する。
【解決手段】絶対位置検出手段により車両の絶対位置を検出し、検出された車両の絶対位置に基づき、地図データ記憶手段に記憶されている地図データの表す道路地図を基準とした車両の位置を取得し、車両の走行に伴い検出された車両の絶対位置を、車両の走行軌跡情報として、道路地図を基準とした車両の位置と関連づけて記憶し、記憶された走行軌跡情報と、道路地図を基準とした車両の位置とを比較し、車両の絶対位置を基準とした場合における地図データの誤差である地図データの信頼度を、地図信頼度として設定する。
(もっと読む)
位置算出装置の誤差円の決定方法
【課題】 GPS位置の測位誤差を表す誤差円を測位環境に応じて再決定する「位置算出装置の誤差円の決定方法」を提供する。
【解決手段】 誤差円の決定方法は、GPSにより測位された一定期間Tcの走行距離Dpと自立航法センサにより測位された前記一定期間Tcに対応する走行距離Dqとの比率を表す走行距離比率に基づきGPS測位によるGPS位置の誤差円Rを決定するステップと、自立航法センサにより測位された航法位置がGPS位置の誤差円Rに含まれないと判定されたとき、走行距離Dpと走行距離Dqを算出するための前記一定期間Tcを予め決められた期間Tsだけ延長させ誤差円Rを再決定するステップとを有する。
(もっと読む)
161 - 180 / 225
[ Back to top ]