
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
301 - 320 / 523
移動体用測位装置

【課題】衛星電波の受信状態に応じた適切な誤差分散を用いて移動体の位置を測位すること。
【解決手段】本発明による移動体用測位装置は、慣性航法により前記移動体の位置を測位する慣性航法測位手段と、衛星航法により前記移動体の位置を測位する衛星航法測位手段と、前記衛星航法測位手段の測位結果と前記慣性航法測位手段の測位結果との関係を観測量とし、前記慣性航法測位手段で用いられる補正パラメータを状態量として、前記衛星航法測位手段の測位結果の誤差分散を用いて、前記状態量を推定する状態量推定手段と、前記状態量推定手段により推定された状態量を前記慣性航法測位手段の測位に反映させる手段と、前記移動体で受信される衛星電波の受信状態に応じて前記誤差分散を補正する補正手段とを備えることを特徴とする。
(もっと読む)
姿勢計測装置

【課題】本発明は、姿勢計測装置の装備場所の適否に起因して生じる障害物による電波遮断による測位信号の捕捉OFFか、または姿勢計測装置の装備状態の適否に起因する振動、衝撃などに起因する捕捉OFFかを分離して判定できる情報を提供することを目的とする。
【解決手段】本発明にかかわる姿勢計測装置は、移動体の姿勢及び方位を計測する姿勢計測装置において、受信不能となった測位衛星の方向に基づいて決められた遮断領域の情報と、慣性センサの異常信号の発生情報とに基づいて、姿勢計測装置の装備場所、装備状態の適否を分離して判定できる技術を提供する。
(もっと読む)
搬送波位相式移動体測位装置
【課題】整数値バイアスの整数解の妥当性を高い精度で評価すること。
【解決手段】本発明による搬送波位相式移動体測位装置は、整数値バイアスの実数解を導出する実数解導出手段と、前記実数解導出手段により導出された実数解に基づいて整数値バイアスの整数解を導出する整数解導出手段と、前記実数解導出手段により導出された整数値バイアスの実数解と前記整数解導出手段により導出された整数値バイアスの整数解との関係に基づいて、前記整数値バイアスの整数解の妥当性を指標する所定の指標値を算出し、該算出した指標値と閾値との関係に基づいて、前記整数値バイアスの整数解の妥当性を評価するテスト手段とを含み、前記テスト手段は、前記閾値を2種類以上用いて及び/又は前記閾値を可変させて、前記整数値バイアスの整数解の妥当性を評価することを特徴とする。
(もっと読む)
位置検出装置及び位置検出方法
【目的】GPS出力データの各成分について信頼度の有無及び誤差指標に基づいて補正処理を行って位置決定精度を向上する「位置検出装置及び位置検出方法」を提供することである。
【構成】GPSの測位周期で該GPSにより測定される車両の各方向位置成分データ及び速度成分データを用いて自律航法による位置計算結果及び該自律航法の位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角を補正する補正処理を行い、GPSにより測定される車両の各方向の位置成分データ及び速度成分データの信頼度を判定すると共に、信頼度ありと判定された成分の誤差指標を算出し、信頼度が無いと判定された測定成分の補正処理における貢献度を零あるいは略零にし、信頼度有りと判定された測定成分の補正処理における貢献度を誤差指標の大きさに応じて小さくする。
(もっと読む)
ジオポジショニングおよびローカルモードを実行する位置追跡
ジオロケーションおよび局所的位置技術は、位置追跡装置および位置追跡される装置の両方に、同時にまたは個別に組み込まれてよく、必要に応じて再構成され得る。位置追跡される無線装置は、マルチユーザー無線加入者ネットワークと通信することができる無線通信回路を含む。ジオロケーション読取回路がGPSまたは類似の位置データを提供する。このジオロケーション読取回路はまた、目標物に関するジオロケーションデータを取得することができる。局所的位置検出装置が局所的位置データを構文解析し、ジオロケーションデータに基づいてジオロケーションの指示が提供される。この局所的位置検出装置はさらに、局所的位置データを用いてジオロケーションデータを修正するときに使用される局所的位置データに応答する。 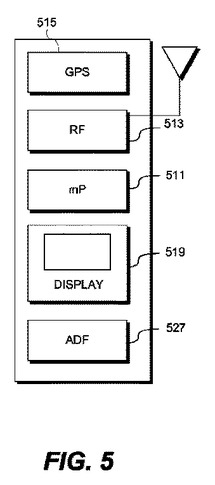 (もっと読む)
(もっと読む)
位置検出装置、それにおける位置の検出をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】GPSの使用が困難な場所でも位置および方位・傾きを検出可能な位置検出装置を提供する。
【解決手段】位置検出手段2は、カメラ1が撮影した2次元バーコードの画像Gを2次元バーコードを正面から正対して見たときの画像に補正して2次元バーコードに対するカメラ1の配置方向に関する方向情報を検出する。また、位置検出手段2は、補正した画像に基づいて、2次元バーコードに記録された2次元バーコードの位置情報および実際のサイズを読み出すとともに、画像のサイズを検出する。そして、位置検出手段2は、実際のサイズと画像のサイズとのサイズ比を演算し、記憶手段4からサイズ比と距離との対応関係を示す対応表を読み出し、その読み出した対応表を参照して、演算したサイズ比に対応する距離を検出する。その後、位置検出手段2は、位置情報、方向情報および距離に基づいて、カメラ1の位置を検出する。
(もっと読む)
鉄道航法システム
【課題】鉄道航法システムにおいて、高度情報データベース等を利用することなく取得した3次元情報を鉄道車両の運行管理に効果的に活用すること。
【解決手段】鉄道車両に搭載され、線路上を走行する鉄道車両のための鉄道航法システムであって、人工衛星からの電波を受信することにより現在位置の緯度、経度および高度を含む3次元位置情報を測位するGPS受信器21と、GPS受信器21が検出した高度情報に基づき、線路4上の一の地点と、線路4上の他の地点との間の勾配値を演算する演算部22と、演算部22が演算した勾配値を3次元位置情報に関連づけて表示する表示部14と、を備える。
(もっと読む)
マルチパス検出装置、測位装置、姿勢方位標定装置、マルチパス検出方法およびマルチパス検出プログラム
【課題】マルチパスの影響が無い搬送波の観測情報に基づいて高精度に位置および姿勢角を標定することを目的とする。
【解決手段】位相差算出部130は各GPS衛星と各GPSアンテナ951との距離を搬送波の数で示す各搬送波位相に基づいて各GPS衛星からの搬送波についてGPSアンテナ951間の搬送波位相の一重差または二重差を算出する。LOSベクトル算出部140は航法メッセージと単独測位結果とに基づいて各GPS衛星に対するLOSベクトルを算出する。基線長算出部150は搬送波位相の一重差または二重差とLOSベクトルとに基づいてGPSアンテナ951間の基線長を算出する。マルチパス判定部160は算出した観測基線長を既知基線長と比較して観測基線長の算出に用いられた各搬送波にマルチパス波が含まれているか判定する。位置姿勢方位標定部120はマルチパス波でない搬送波の観測情報に基づいて位置姿勢を標定する。
(もっと読む)
通信システム、車載機及び路側機
【課題】移動する自車の走行位置を精度良く特定することができる通信システム、車載機及び路側機を提供する。
【解決手段】車載機20は、自車が光ビーコン10との通信領域Rに進入したと判定した場合、測位用の信号を路側機30へ送信する。路側機30は、各受信部31、32、33で測位用の信号を受信し、受信した信号の到達時間差を算出する。路側機30は、予め記憶してある各受信部31、32、33の位置及び算出した到達時間差に基づいて、車載機20の位置情報を算出し、算出した位置情報を測位結果として車載機20へ送信する。車載機20は、測位用の信号を送信した時点から測位結果である自車の位置情報を受信するまでの間の自車の走行距離、走行方位などに基づいて、測位結果を補正して自車位置を特定する。
(もっと読む)
絶対位置決めモード及び相対位置決めモードを含む位置決め装置、方法、並びにプログラム
本発明は、絶対位置決めシステム及び相対位置決めシステムを使用して位置を判定するように構成される位置決め装置(PD)に関する。位置決め装置は、絶対位置決めシステム及び場合によっては相対位置決めシステムを使用して位置を判定する第1のモード、並びに相対位置決めシステム及び場合によっては絶対位置決めシステムを使用して位置を判定する第2のモードで動作するように構成される。絶対位置決めシステムは、第2のモードにおいてよりも第1のモードにおいてより重点を置かれ、位置決め装置は、第1のモードから第2のモードに切り替えるように構成される。位置決め装置(PD)はデジタル地図データベース(DMD、3DMD)へのアクセスが可能であり、第1のモードから第2のモードへの切り替えは、地図データベース(DMD、3DMD)に格納された情報と組み合わせて、少なくとも判定された位置に基づいて決定される。 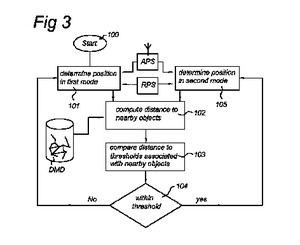 (もっと読む)
(もっと読む)
位置検知装置
【課題】複数の絶対位置検知装置の精度を評価して、最も高精度の絶対位置検知装置の検知出力を位置検知結果として出力する。
【解決手段】それぞれ既知の位置から放射される複数の信号を受信して自己の絶対位置を検知する複数種の絶対位置検知装置8と、所定期間内における自己の移動量を自己の相対位置の変化として検知する相対位置検知装置7と、前記所定期間内における相対位置の変化の軌跡と前記所定期間内における前記絶対位置検知装置が検知した絶対位置の変化との類似度を、前記各種の絶対位置検知装置毎に計算する類似度算出部14と、前記複数種の絶対位置検知装置のうち、最大の類似度を有する絶対位置検知装置の出力を選択して出力する出力切り替え部15を備えた。
(もっと読む)
位置検出装置及び位置検出方法
【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
位置標定に用いられる携帯端末及び位置標定システム
【課題】直接波以外の位置標定信号により位置標定が行われるのを防ぎ、位置標定の精度を確保する。
【解決手段】位置標定信号を受信して自身の現在位置を標定する携帯端末300において、位置標定信号の受信信号強度履歴1200を記録し、加速度センサ318等の検知値から求めた移動履歴を記録し、受信した位置標定信号の受信信号強度から第1自由空間損失を求め、受信信号強度履歴1200から位置標定信号の受信信号強度が最大となった位置である起点位置を求め、起点位置と移動距離/方向履歴とに基づいて、起点位置から現在位置までの距離を求め、求めた距離から位置標定信号の第2自由空間損失を求め、第1自由空間損失と第2自由空間損失とを比較することにより受信した位置標定信号が直接波であるか否かを判定し、直接波でないと判定した場合に受信した位置標定信号による位置標定を行わないようにする。
(もっと読む)
車載ナビゲーション装置、ナビゲーションシステム及びコンピュータプログラム
【課題】GPSを利用して車輌の位置を測位する場合に、電波を直接受信可能なGPS衛星の数が少ない場合にも、高精度で測位を行なえるようにする。
【解決手段】GPS衛星からの直接波による測位結果に基づいて、GPS衛星からの反射波の経路長Ld1+Ld2を直線距離Lに補正する補正量をデータベース化しておく。直接波を受信可能なGPS衛星の数が必要な数に満たない場合に、他のGPS衛星からの反射波をデータベースに基づいて補正することにより、直接波と補正された反射波とによって測位を行なう。
(もっと読む)
ローカル位置を取得し、情報をオーバーレイするための方法および装置
複数のデバイスおよびオブジェクトの少なくとも一部分の間で相対位置情報を特定するための方法およびシステムを開示する。この相対位置情報は、それらの複数のデバイスおよびオブジェクトに対応するセンサデータおよび個々の情報属性のうちの少なくとも1つに基づく。それによって、他の任意の位置参照システムを使用することなく動作するピアツーピア無線ネットワークを用いた高精度、低費用の測位参照ベースシステムを実現する。 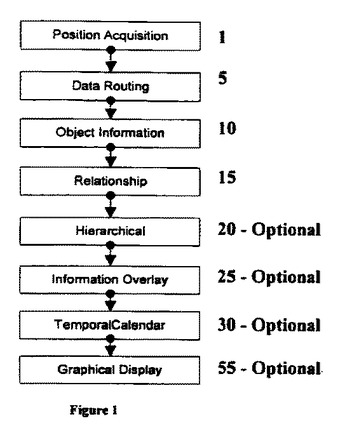 (もっと読む)
(もっと読む)
移動局の静止判定を利用した位置検出システム
【課題】移動局の静止判定を用いた精度が高い位置検出システムを提供する。
【解決手段】移動局において、フレーム識別手段によりフレーム識別情報が付され、静止判定手段により移動局が静止しているか否かが判定され、少なくともフレーム識別情報と静止判定手段による結果とを含む信号が発信される。基地局において、基地局情報送信手段により、少なくとも基地局識別番号と受信されたフレーム識別情報と距離関連情報測定手段による距離関連情報とからなる基地局情報が測位サーバに送信される。測位サーバにおいては、距離関連情報測定誤差算出手段により、移動局が静止している場合には基地局情報に基づいて距離関連情報測定誤差が算出され、重み行列算出手段により距離関連情報測定誤差に基づいて重み行列が算出され、測位手段において距離関連情報と重み行列とに基づいて移動局の位置が算出される。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる誤差を精度良く反映する指標値を用いて、測位に用いる衛星を適切に選択すること。
【解決手段】本発明は、移動体に搭載され、該移動体の位置を測位する移動体用測位装置において、移動体に搭載されるセンサの出力信号により移動体が停止しているか否かを判定する移動体停止判定手段と、前記移動体停止判定手段により移動体が停止していると判定されている間に観測される衛星電波の観測値を用いて、移動体の速度を、衛星毎に導出する移動体速度導出手段と、
前記移動体速度導出手段により導出された衛星毎の移動体速度に基づいて、測位に用いる衛星を選択する衛星選択手段とを備えることを特徴とする。
(もっと読む)
無線測位システム、移動体、そのプログラム
【課題】自律型ロボット等の自律的に移動できる移動体が、無線測位可能な環境下で、障害物の影響による誤差を少なくし、高精度に測位を行う。
【解決手段】ジャイロ23及び回転数検知用エンコーダ24によって移動方向、移動量を検知することで位置推定する。この位置推定は、移動量が多くなるに従って誤差が増大する。また、無線端末21によって各基地局との無線通信を行うことで無線測位を行う。そして、任意の各地点毎に、無線測位結果に基づいて無線測位可否データ、通信状態データを生成して、その位置座標に対応付けて記憶することを繰返すことでこれらデータを蓄積する。データ蓄積量が多くなるに従って、蓄積したデータを参照すれば、無線測位不能/可能なエリアが分かるようになるので、例えば目的地が無線測位不能エリア内にある場合には、無線測位不能エリア内での移動距離が少なくなるように移動制御する。
(もっと読む)
航法システム
【課題】計算能力の低い飛しょう体においても位置精度が非常に良いCPDGPS計算結果を利用できるようにするとともに、リアルタイムに飛しょう体の軌跡および到達ポイントを指令局側で正確に把握することが可能な航法システムを得る。
【解決手段】飛しょう体に搭載された航法装置1によるGPS受信機の観測データを、飛しょう体の監視および制御を行う指令局8へ送信し、指令局8側でGPS基準局11のデータと組み合わせてCPDGPS計算を実行する。その計算結果はテレメトリを通じて飛しょう体に再送信され、航法計算機によるGPSとINSの複合航法計算の自己位置計算の補正に使用する。また、この過程で、指令局8が飛しょう体の軌跡を精度良く把握することが可能となるため、ターゲット座標へ正確に誘導されたかどうかを把握することが可能になる。
(もっと読む)
位置検出装置及び位置検出方法
【課題】位置情報衛星から送信される位置情報信号を遮る障害物が存在するか否かを判断
することができる位置検出装置を提供する。
【解決手段】位置情報衛星から発信される位置情報信号を受信して現在位置を演算する第
1の現在位置演算手段3と、移動距離及び移動方位を検出して現在位置を演算する第2の
現在位置演算手段4と、前記位置情報信号を遮る障害物の有無を検出する障害物を反射波
によって検出する障害物検出手段8,9と、前記障害物検出手段で前記障害物を検出して
いないときに前記第1の現在位置演算手段を選択し、前記障害物を検出しているときに前
記第2の現在位置演算手段を選択する選択手段とを備えている。
(もっと読む)
301 - 320 / 523
[ Back to top ]