
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
501 - 520 / 523
経路誘導装置

【課題】 設定の手間を要することなく、正確に経路を案内することができる経路誘導装置を提供する。
【解決手段】 衛星から送出された電波に基づいて電波を受信するアンテナ2の移動軌跡を算出するアンテナ軌跡算出手段4と、車両における基準点の移動軌跡を算出する車両軌跡算出手段7と、アンテナ2および基準点の各移動軌跡に基づいて基準点に対するアンテナ2の相対位置を算出するアンテナ相対位置算出手段8とを備え、基準点の位置を算出する。
(もっと読む)
移動体検出システム、及び、移動体検出プログラム

【課題】それ自身では位置精度が十分ではない無線タグを用いながら、位置検出の精度をはるかに向上させるようにした移動体検出システムを提供する。
【解決手段】移動体10に装着され、移動体10の停止(又は動き始め)を検出するセンサ11(11b)と、移動体10に装着され、移動体10から識別コードを送信する無線タグ12と、移動体10の動画像を撮像する撮像手段20とを備えてなる移動体検出システム1a(1b)であって、前記センサ11(11b)によって移動体10の停止(又は移動体10の動き始め)が検出された場合、前記撮像手段によって撮像された停止前(又は動き始め前)の画像と停止後(又は動き始め後)の画像を抽出し、これら前後の画像の差分をとって移動体10の位置を検出する。そして、無線タグ12から送信されてきた識別コードとともに何がどこに存在するかを報知可能に出力する。
(もっと読む)
車両位置検出装置
【課題】 GPS信号の信頼性に応じた補正処理を行うことができ、精度の高い車両の位置検出を行うことのできる車両位置検出装置を提供する。
【解決手段】 GPS信号を受信するGPS受信機2と、前記GPS信号に基づいてGPS位置A(t)を演算する第1の演算手段と、車両の走行距離を検出する距離検出手段と、前記車両の進行方位を検出する方位検出手段と、前記距離検出手段により検出された走行距離と前記方位検出手段により検出された進行方向とに基づいて相対位置R(t)を演算する第2の演算手段と、を備えた車両位置検出装置であって、前記GPS位置の信頼性を算出する判定手段と、前記判定手段による信頼性および前記第1の演算手段による演算時間を考慮してGPS位置A(t)により相対位置Rを補正する補正手段と、を備えてなる。
(もっと読む)
ナビゲーション装置
【課題】 非自走状態で搬送された車両が搬送先に到着した際に、車両の正しい位置及び方向を迅速に呈示できるナビゲーション装置を提供する。
【解決手段】 絶対位置検出部6(GPS受信機)での絶対位置を示す検出結果と、相対角度検出部5及び車両I/F部10からの相対的位置を示す情報とから、車両の位置を推定する。非自走状態で搬送された車両が搬送先に到着したときに、絶対位置検出部6(GPS受信機)での検出結果に基づいて車両位置を推定する際の基準を緩和する。異なる基準を記載した複数の基準テーブルA,Bを準備しておき、非自走状態で搬送された車両が搬送先に到着したときに、基準の条件が緩やかな方の基準テーブルを使用する。
(もっと読む)
ナビゲーション用途のための、改良されたGPS累積デルタ距離処理方法
移動物体の位置と速度の測定に使用されるGPSナビゲーション技術において、擬似距離(PR)測定値および累積デルタ距離(ADR)測定値が、物体において受信GPS信号から生成される。ナビゲーションパラメータ(例えば位置、速度、クロック)はPR測定値、およびADR測定値の間の差から推定される。本明細書で述べるADR測定式は、よりいっそう精密な方法で公式化され、ADR測定値の間の差を計算する時間間隔は、現在のGPS用途のADR差分手法で使用されるものよりもはるかに大きい。故にADRの差はより正確であり、非常に精密なナビゲーションソリューションを生じる。ADR差分手法はカルマンフィルター処理の収束時間短縮に寄与し、宇宙飛行体のナビゲーション精度を向上する。これらの高精度なADR処理アルゴリズムを統合型GPS/IMUナビゲーション用途に拡げるための技術も提供される。  (もっと読む)
(もっと読む)
測位装置,情報配信装置,測位方法及び情報配信方法
【課題】
本発明は測位装置に関し、マルチパスや回折による影響を補正し、測位可能率を保ったまま高精度な測位を可能にする装置及び方法を提供する。
【解決手段】
道路周辺の構造物や地形の三次元形状情報と、道路区間における測位衛星の直視可能時間の情報をもとに、測位装置の現在位置と各測位衛星の位置の情報から、測位装置の位置から直視可能な測位衛星を特定し、直視可能な測位衛星のみの擬似距離とマルチパスによる擬似距離の補正量を計算して測位位置を求めることにより、測位可能率を低下させずにマルチパスや回折による影響を抑える。
(もっと読む)
位置検出方法及び位置検出装置
【課題】
本発明は衛星を利用した位置検出システムに関し、2個以下のGPS衛星しか捕捉できない場所でも高精度な位置検出を可能にするシステムを提供する。
【解決手段】
上記課題は、移動体の移動経路を想定することによって、未知数を少なくして位置検出の演算を行うことにより達成される。すなわち、移動体の移動経路が道路,歩道,鉄道の軌道などあらかじめ想定される場合には、移動経路上の3次元位置の関係(緯度,経度,高さ)が既知であることから、例えば緯度のみがわかれば経度,高さは一義的に計算することができ、2個の衛星を捕捉することで、移動体の緯度,経度,高さの3次元位置を検出することが可能となる。
(もっと読む)
カーナビゲーション装置及びカーナビゲーション装置に用いられるダウンコンバータIC
【課題】従来のGPSとVICSを統合して回路規模は縮小可能であるが、カーナビゲーション装置全体として省電力化に関しては、十分改善されておらず、回路を統合しても省電力化が困難であった。
【解決手段】カーナビゲーション装置は、GPS/VICS統合アンテナ1に接続されたダウンコンバータIC50と、光アンテナ2に接続された光送受信部17と、制御部20と、カーナビゲーション制御部30を含んでいる。さらにダウンコンバータIC50はGPS/VICS切替器6を有し、カーナビゲーション制御部30が渋滞を検知すると制御部20により信号を切替え、同時使用を避けると共に状況に応じて同時停止とすることで消費電力を低減させる。
(もっと読む)
カーナビゲーション装置及びカーナビゲーション装置に用いられるダウンコンバータIC
【課題】従来のGPSとVICSを統合して回路規模は縮小可能であるが、カーナビゲーション装置全体として省電力化に関しては、十分改善されておらず、回路を統合しても省電力化が困難であった。
【解決手段】カーナビゲーション装置は、GPS/VICS統合アンテナ1に接続されたダウンコンバータIC50と、光アンテナ2に接続された光送受信部17と、路上機の座標情報が予め記憶された座標情報メモリ21と、制御部20を含んでいる。さらにダウンコンバータIC50はGPS/VICS切替器6を有し、制御部20により信号を切替え、同時使用を避けることにより消費電力を低減させる。
(もっと読む)
3次元配置型GPS受信機、それを用いた姿勢測定方法及びシステム
【課題】 姿勢が大きく変動しても高精度に姿勢を測定する技術を提供すること。
【解決手段】 4個のGPSアンテナ40〜43を多面体の頂点位置に立体的に配置した3次元配置型GPS受信機を用い、いずれかの仮想面を構成する基線ベクトルから3次元配置型GPS受信機の姿勢を測定する姿勢測定方法を提供する。各GPSアンテナにおいて少なくとも4基の衛星からのGPS搬送波の位相情報を得て、いずれか3個のGPSアンテナにおいて受信した4基の衛星からのGPS搬送波の位相情報から2重位相差を求め、GPSアンテナ間の3つ以上の基線ベクトルを算出すると共に、そのうち2つの基線ベクトル値を該3次元配置型GPS受信機の姿勢値として得る。
(もっと読む)
端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】前回測位位置が真の現在位置と大きく離れている場合であっても、精度が良い測位結果を出力することができる端末装置等を提供すること。
【解決手段】端末装置22は、端末装置22が測位障害領域に進入したか否かを判断する測位障害領域進入判断手段と、測位障害領域進入判断手段の判断結果に基づいて、前記測位障害領域出口位置情報を取得する測位障害領域出口位置情報取得手段と、端末装置22が測位障害領域を離脱したか否かを判断するための測位障害領域離脱判断手段と、測位障害領域離脱判断手段の判断結果に基づいて、現在位置の複数の測位結果を示す測位結果情報を生成する測位結果情報生成手段と、測位結果情報に示される複数の測位結果から出力用測位結果を選択するための測位結果選択情報を格納する測位結果選択情報格納手段と、測位結果選択情報として測位障害領域出口位置情報を適用する測位障害領域出口位置情報適用手段等を有する。
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
位置測位装置を有する移動体情報端末
【課題】 CPUの負荷に応じて測位部を選択し、CPU負荷の分散、軽減を図る。また、場面に応じて必要とする測位精度の測位部を選択する。
【解決手段】 GPS測位部20は、第1測位部21と第2測位部22とを備える。第1測位部21は準天頂衛星から高精度測位情報を受信し、高精度測位情報に基づき、第2測位部22よりも精度の高い高精度測位方式で測位する。第2測位部22はGPS単独測位を行なう。切替部24は2つの測位部を選択的に切り替える。切替部24は、判定部30が出力する判定信号に従い測位部を切り替える。判定条件設定部33は判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は入力した判定条件信号と車速検知部90等から入力される判定対象信号81等に基づきどちらの測位部を選択するかの判定を行う。選択判定部34は判定結果を判定信号として切替部24に出力する。
(もっと読む)
測位情報装置及びダウンコンバータIC
【課題】従来のGPSとVICSを統合して回路規模は縮小可能であるが、カーナビゲーション装置として大切な測位精度の向上に関しては、改善されておらず、回路を統合してもGPSの測位性能を向上させることができない。
【解決手段】測位情報装置は、GPS/VICS統合アンテナ1に接続されたダウンコンバータIC50と、光アンテナ2に接続された光送受信部17と、路上機の座標情報が予め記憶された座標情報メモリ21と、制御部20を備えている。さらにダウンコンバータIC50はGPS/VICS切替器6を有し、制御部20により信号を切替え、VICS情報によりGPSの測位精度を向上させる。
(もっと読む)
位置表示端末
【課題】 GPS衛星からの電波を受信できない領域でも当該位置表示端末の自位置を把握することが可能な、位置表示端末を提供する。
【解決手段】 位置表示端末10は、境界装置30から入場情報を受信する情報受信部12と、全地球測位システムを利用して位置表示端末10の自位置を取得する第1位置取得部14と、位置表示端末10の加速度に基づいて、位置表示端末10の移動距離を測定する距離測定部16と、位置表示端末10の主軸線の向く方位と、位置表示端末10の移動距離と、に基づいて、基準位置からの相対的な移動ベクトルを算出する移動算出部18と、移動ベクトルに基づいて位置表示端末10の自位置を取得する第2位置取得部20と、自位置に応じた地図を表示する表示部24と、を備える。
(もっと読む)
位置検出装置及び位置検出方法
【課題】 基準衛星の切り替え等が発生した場合であっても、整数値バイアスの確定処理を一からやり直す必要の無い位置検出装置の提供。
【解決手段】 移動局により観測可能な複数の衛星の中から1つの基準衛星を設定し、移動局が所定周期毎に観測する観測データを用いて、各衛星からの衛星信号の搬送波位相の積算値に含まれる整数値バイアスを、前記基準衛星に係る積算値を基準とした他の衛星に係る積算値の位相差に基づいて推定し、該推定した整数値バイアスに基づいて移動局の位置を検出する位置検出装置であって、前記基準衛星が観測不能となった場合、観測可能な複数の衛星の中から前記基準衛星以外の衛星を新たな基準衛星として、過去の観測データを用いて整数値バイアスの推定を実行することを特徴とする。
(もっと読む)
ナビゲーション装置および建築施設進入判定方法
【課題】 加速度センサや傾斜センサなどの別機器を配備することなく、車両が駐車場に入ったことを精度高く、かつ、早期に検出することが可能な「ナビゲーション装置および建築施設進入判定方法」を提供する。
【解決手段】 GPS受信機から取得される衛星配置情報により示される衛星配置パターンに基づいて、車両が駐車場に入ったか否かを判定することにより、GPS受信機があれば駐車場への進入を検出できるようにして別機器の配備を不要とするとともに、自車位置の情報に基づくマップマッチングの影響を受けることもなく、車両が駐車場に入ったことを精度高く検出できるようにする。さらに、駐車場の入口付近で受信される衛星配置情報を利用することで、車両が駐車場の内部に入り込まなくても進入の有無を判定できるようにする。
(もっと読む)
搬送波信号の位相誤差評価
グローバル・ポジショニング・システムの搬送波信号の位相誤差及び/又は振幅誤差は、このGPS搬送波信号の最適最小分散を用いることにより評価される。 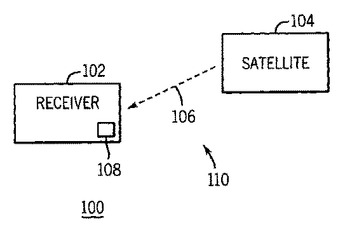 (もっと読む)
(もっと読む)
高度なナビゲーション性能のための方法およびシステム
ナビゲーションのための方法およびシステムが開示される。一実施例においては、地上局の視野内におけるGPS衛星からのデータがイリジウム衛星などのLEO衛星に再伝送され、必要であれば、ユーザに伝送される前に相互リンクされる。次いで、ユーザは、干渉またはジャミングによるエラーを解決するために、GPS衛星から直接受取ったデータとフィードフォワードされたデータを組合せることができる。代替的には、方法は、ユーザ装置において少なくとも1つの搬送波信号を受信するステップを含み、各々の搬送波信号は別個のLEO衛星によって伝送される。ユーザ装置は、第1の搬送波位相情報を得るよう搬送波信号を処理する。ユーザ装置は、慣性基準ユニットにおいて得られる慣性位置決定を再現する。ユーザ装置は、慣性位置決定および第1の搬送波位相情報に基づいてユーザ装置の位置を導き出す。 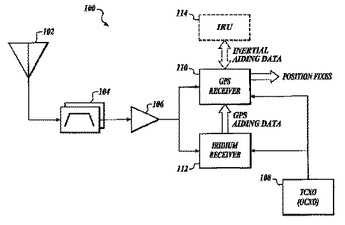 (もっと読む)
(もっと読む)
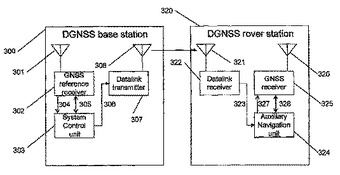
移動プラットフォームの衛星ベースの相対測位のための方法および装置
本発明は、衛星ベースのナビゲーション技法および移動するプラットフォームに設置された設備を用いた、移動するプラットフォーム間の相対的位置の決定を対象とする。本発明は、観測スペースおよびナビゲーションスペースのディファレンシャルシステムのコンセプトを組み合わせ、データリンクローディングおよび付加的プロセッサの計算負荷を最小化する際に特定のGNSS受信機のビルトインディファレンシャル測位およびナビゲーション能力に依拠するために、DGNSS基準局を時変モードで動作させる。本発明は、参照局モードで動作中にそれは静止していると仮定するDGNSS設備を用いて、移動している基準局に関して正確な相対測位およびナビゲーションを達成する。
 (もっと読む)
(もっと読む)
501 - 520 / 523
[ Back to top ]