
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
481 - 500 / 523
MEMSを使用することにより移動電話におけるGPS信号処理を改善するシステムおよび方法
受信器Rが移動端末Uの位置に関係する衛星からデータを取得する衛星Sのコンステレーションを有する衛星測位システム内のユーザ移動端末Uで使用される受信器R。MEMS装置Mは、受信器Rに組み込まれ、移動端末Uの速度の絶対値計算式Iを検出し、続いて上記の値を受信器Uに提供するように構成される。移動端末の速度のベクトル成分(Vux、Vuy、Vuz)に対応する値を、受信器Rによってまたは受信器Rの代わりに計算する手段が提供され、このことは、ユーザ速度に関係するドップラー効果が得られることを可能にする。  (もっと読む)
(もっと読む)
測位装置およびそれを用いる位置情報システム
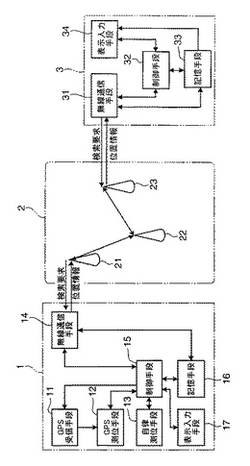
【課題】 携帯電話の端末装置や携帯情報端末に組込まれるなどして、使用者によって所持され、GPS測位を行うとともに自律測位も併用するようにしたセキュリティ端末において、常に良好な測位結果を得られるようにする。
【解決手段】 GPS受信手段11およびGPS測位手段12によるGPS測位結果と、自律測位測位手段13による自律測位結果とを、制御手段15が選択的に採用して、無線通信手段14から通信ネットワーク2を介してセンター装置3へ送信するセキュリティ端末1において、前記制御手段15は、GPS測位を行う度に、GPS測位結果と自律測位結果とから、それぞれに予め設定されるエラー値判断基準に基づき、より正確と推定される方の測位結果を、前記自律測位手段13の初期位置に設定する。したがって、逐次更新され、しかもGPS測位結果をそのまま採用する訳ではなく、初期位置精度を向上できる。
(もっと読む)
カメラの位置及び姿勢情報補正方法及びその装置

【課題】カメラに装着された3ラインスキャナーを介して得られる画像情報を分析し、カメラの位置と姿勢情報とを精密に補正できるようにする方法及び装置を提供すること。
【解決手段】衛星航法装置を用いてカメラの位置を計算するステップと、慣性航法装置を用いてカメラの姿勢を計算するステップと、カメラに装着された3ラインスキャナーを介して入力される画像を分析し、カメラの位置及び姿勢補正情報を生成するステップと、生成された位置及び姿勢補正情報をそれぞれ衛星航法装置と慣性航法装置とにフィードバックするステップとを有する。3ラインスキャナーを介して入力される画像は、前方スキャナー観測画像、直下スキャナー観測画像及び後方スキャナー観測画像とから構成される。人工衛星や航空機、車両などの輸送手段に搭載されたカメラを介して観測された画像に対し、地上基準点を使用しなくともカメラの外部標定要素を精密に決めることができる。
(もっと読む)
潮位監視システム,潮位監視システム用の海上ブイ及び地上局装置、潮位監視方法、潮位監視プログラム
【課題】 所定の海域における海面の上下動を検出し、その解析により津波,高潮等の潮位異常を検出するようにした潮位監視装置,潮位監視方法及び潮位監視プログラムを提供する。
【解決手段】 所定海域の海面上に分散配置してアンカーにより係留され、海面高さを測定する測定部と、この測定部で測定された測定値を測定時刻と共に送信する通信部と、を有する複数個の海上ブイ100と、地上の所定箇所に配置され、各海上ブイの通信部から送信されてくる測定値及び測定時刻を受信する通信制御部と、上記通信制御部で受信した各海上ブイからの測定値及び測定時刻に基づいて、上記所定の海域における海面の上下動を解析し、潮位の異常を検出すると共に、各海上ブイの位置情報を参照して、潮位の異常の移動方向及び移動速度を算出する潮位解析部と、を有する地上局装置200と、を設ける。
(もっと読む)
データ収集システムおよびデータ収集方法
【課題】 通信インフラに掛かる負荷および通信コストの増大を招くことなく、低コストで、信頼の高い交通情報を得られるデータ収集システムを提供する。
【解決手段】 複数の測位用衛星30から測位電波信号を受信して自端末の現在位置を検出する、移動体10に搭載可能な携帯電話機20と、携帯電話機20にて検出された現在位置の情報を含む位置データと予め用意されている地図データとに基づいて、移動体10が走行した上記地図データ上における道路の経路を特定する道路交通情報収集装置60とを有する。携帯電話機20における上記現在位置の検出の間隔である測位間隔が、上記位置データから求まる移動体10の移動速度に応じて変更される。
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
ナビゲーション装置
【課題】 測位誤差の補正精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、GPS受信機2による今回の測位タイミングにおける測位位置が含まれる予測誤差範囲を設定する誤差範囲設定部12と、今回の測位タイミングにおいてGPS受信機2から出力された実際の測位位置が予測誤差範囲に含まれるときに実際の測位位置を用い、実際の測位位置が予測誤差範囲に含まれないときに、実際の測位位置と予測誤差範囲との相対的な位置関係に基づいて測位位置の補正を行う相対位置判定部14および位置補正部16とを備えている。
(もっと読む)
船舶の入出港離着桟支援方法およびシステム
【課題】 入出港離着桟時における船舶と岸壁との位置関係、船舶の速度や方位などを容易、正確に把握できるようにする。
【解決手段】 演算制御部38の船舶位置演算部46は、現在位置演算部56がGPS衛星、静止衛星からの情報に基づいて船舶の位置を求め、距離演算部48と表示制御部50とに出力する。距離演算部48は、現在位置演算部56の求めた船舶の位置と、情報記憶部52の港湾情報記憶部60が記憶している情報とに基づいて、桟橋などと船舶との距離を求めて表示制御部50に送出する。表示制御部50は、港湾情報記憶部60、船舶情報記憶部62が記憶している情報を読み出し、表示部42に港湾施設の鳥瞰図に船舶の鳥瞰図を重ねて表示するとともに、船速検出部14の検出した船速、方位検出部16の検出した船首の方位、距離演算部48の求めた船舶と桟橋との距離などを表示する。
(もっと読む)
作業管理装置及びこれを備えた作業機械
【課題】オペレータの所望する様々な表示態様に対応し、作業効率を向上させることができる作業管理装置及びこれを備えた作業機械を提供する。
【解決手段】作業機械の作業状況を管理する作業管理装置において、表示装置の表示画面101上に作業機械シンボル100を主体として表示させ、作業機械の移動に応じて作業対象エリアである大ブロック102を移動させる表示態様の作業機主体表示モード、及び地形の任意選択位置を画面中央に固定して表示させ、固定表示した大ブロック102に対して作業機械シンボル100を移動させる表示態様の地形主体表示モードを選択的に切り換えるためのフォーカス選択ボタン110とを備える。
(もっと読む)
測位用受信装置
【課題】 受信信号が反射波であるのか直接波であるのか、あるいはその混合によるものであるのかの判定を高精度に行えるようにして、位置や速度の測定を高精度に行えるようにする。
【解決手段】 判定対象衛星を除く複数の衛星に基づいて受信点の測位を行うとともにその位置変化速度Rvを求め、判定対象衛星の軌道情報と受信点の位置と判定時間とに基づいてその判定時間での判定対象衛星の位置変化速度Svaを求める。また、受信点位置の変化速度Rvと判定対象衛星の位置変化速度Svaを用い、判定対象衛星から直接波を受信している場合に相当するキャリア位相変化速度Cva´を推定する。そして、判定対象衛星からの電波の観測によるキャリア位相変化速度Cvaと判定対象衛星の推定キャリア位相変化速度Cva´とのずれ量εを求め、このεの大きさに応じて判定対象衛星の観測結果の採用の要否や信頼度を求める。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 速度データの補正をより正確に行うことができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置1は、測位された速度データが予測加速度最大値(第1の予測範囲)内にあるか否かを判定する第1の判定部16aと、測位された速度データが予測加速度最大値外と判定されたとき、当該速度データが予測加速度最大値の2倍の範囲(第2の予測範囲)内にあるか否かを判定する第2の判定部16bと、当該速度データが第1の予測範囲外であってかつ第2の予測範囲内であるとき、当該速度データを第1の補正速度に補正し、当該速度データが第2の予測範囲外であるとき、当該速度データを異常速度として当該速度データを第2の補正速度に補正し、補正された速度データに基づき移動体の位置を算出する位置算出部18とを有する。
(もっと読む)
移動体姿勢検出装置
【課題】 測位可能な、天頂に近い2つ程度の少ない数の測位衛星からしか電波が届かないような場所であっても移動体の絶対的な姿勢を検出することができる移動体姿勢検出装置を提供する。
【解決手段】 複数の受信要素1−1〜1−3を配置してなるアンテナ1と、アンテナ1の受信要素又は移動体の位置若しくはこれを近似する概略の位置に関する情報に基づき求められる位置から測位衛星への視線方向を規定する衛星方向情報を求める衛星方向獲得手段2と、少なくとも2つの測位衛星から受信した航法電波について受信要素間の位相差をそれぞれ求め、これら位相差及び衛星方向情報に基づいて測位衛星からの航法電波を受信している少なくとも一対の受信要素の組み合わせの基線ベクトルを検出する基線ベクトル検出手段3と、基線ベクトルにより規定される姿勢を移動体の姿勢として算出する姿勢演算手段4とを備える。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 電源投入後や長時間無測位状態からの測位開始時に、精度の高い初期位置を得ることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置は、測位開始時に、差分距離Lを算出するステップと、少なくとも差分距離Lが閾値より小さいか否かを判定するステップと、閾値よりも小さいと判定されたとき、測位データから算出された位置を初期基準点位置と決定し、閾値以上であると判定されたとき、前回測位時の基準点位置に今回測位時の速度ベクトルを加算した値を暫定的な基準点位置と決定するステップとを有する。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 本発明は、移動体の走行状態に応じて精度良く移動体の位置の算出をすることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置1は、測位衛星からの受信電波を受信するRF受信部12と、受信された信号から移動体の速度および角速度データを測位する測位演算部14と、速度と角速度の関係を規定する角度予測関数に基づき角速度の予測範囲を設定する予測範囲設定部16と、測位された角速度データが予測範囲内にあるか否かを判定し、角速度データが予測範囲外の場合には、角速度データが予測範囲内となるように角速度データを補正する測位データ補正部20と、移動体の走行状態を判定し、当該判定結果に応じて予測範囲設定部16による角度予測関数の選択を制御する予測範囲可変部18とを含んで構成される。
(もっと読む)
携帯装置で使用するためのパーソナルナビゲーション装置
ユーザによって使用されるナビゲーションシステムは、ナビゲーションユニットと携帯装置とを含む。ナビゲーションユニットは、ナビゲーション関連出力を生成する。ナビゲーションユニットは、無線通信リンクを介して携帯装置にナビゲーション関連出力を送信する。携帯装置は、ナビゲーション関連出力を受信し、それによって実施される処理のためにナビゲーション関連出力の少なくとも一部を使用する。一実施形態では、携帯装置は、携帯装置のユーザからユーザ入力を受信するための入力インターフェースを含む。このような一実施形態では、携帯装置は、無線通信リンクを介してナビゲーションユニットにナビゲーション関連入力を送信し、ナビゲーションユニットは、ナビゲーション関連出力を生成するため、ナビゲーション関連入力の少なくとも一部を使用する。 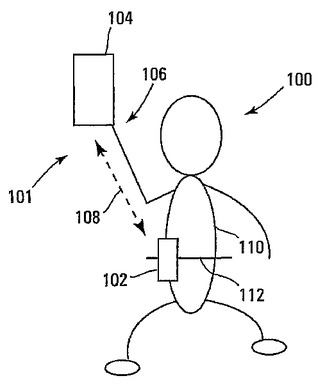 (もっと読む)
(もっと読む)
加速度計およびGPS受信機を用いた発射体の誘導
発射体には、その本体の直交座標系があることを特徴とする、ジャイロを持たない発射体誘導システム。この発射体には、3軸の加速度計があり、x、y、およびz軸に沿って測定したx、y、およびz加速度データを提供する。GPSアンテナおよび受信機手段は、機内に搭載したGPSからの位置および速度データを、地球の基準航行座標系で提供する。コンピュータおよびプログラム手段は、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、またそれにアクセスし、さらに、x、y、およびz軸加速度データを、本体座標系から航行座標系へと変換する。プログラム手段は、対応する時間インデックス付き加速度データと、GPS速度データおよび位置データとに応答し、推定した発射体のロール角、ピッチ角、およびヨー角を、最適なスムージング技術を用いて、現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して計算し、発射体を所定の位置に誘導する飛行制御システムに出力する。 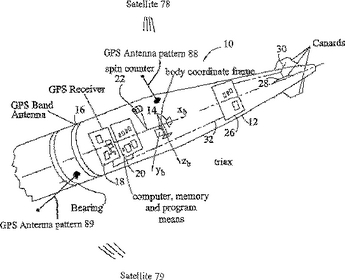 (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】 測位精度および測位率の大幅な低下を防止することができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、仰角マスク値よりも大きな仰角に対応する位置に配置された複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、GPS受信機2で電波を受信したGPS衛星の数を検出する履歴保管部12と、検出されたGPS衛星の数に基づいて仰角マスク値を可変に設定する仰角マスク設定部14と、GPS受信機2から出力される測位位置に基づいて現在位置を計算する車両位置計算部20とを備えている。
(もっと読む)
ナビゲーション装置
【課題】 誤差範囲の設定精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、測位位置の計算に使用された複数のGPS衛星のそれぞれの仰角値の検出と、複数のGPS衛星の重心位置の検出を行うとともに、検出した仰角と重心位置とに基づいて測位位置の誤差範囲を設定する誤差円半径計算部14と、GPS受信機2から出力された測位位置と誤差円半径計算部14によって設定された誤差範囲とを用いて現在位置の計算を行う車両位置計算部20とを備えている。
(もっと読む)
経路誘導装置
【課題】 設定の手間を要することなく、正確に経路を案内することができる経路誘導装置を提供する。
【解決手段】 衛星から送出された電波に基づいて電波を受信するアンテナ2の移動軌跡を算出するアンテナ軌跡算出手段4と、車両における基準点の移動軌跡を算出する車両軌跡算出手段7と、アンテナ2および基準点の各移動軌跡に基づいて基準点に対するアンテナ2の相対位置を算出するアンテナ相対位置算出手段8とを備え、基準点の位置を算出する。
(もっと読む)
二重冗長GPSを用いて妨害を防止する航空機の航行システム
【課題】
【解決手段】本発明は、無人の航空機の航行システムである。航行システムは、地球上の位置探査システムの信号を受信する第1のアンテナと、第1のアンテナに接続されて、第1の干渉抑制技術を用いて、地球上の位置探査システムの信号の干渉を抑制する第1の干渉抑制ユニットと、第1の干渉抑制ユニットから信号を受信する第1の航行ユニットと、地球上の位置探査システムの信号を受信する第2のアンテナと、第2のアンテナに接続されて、第2の干渉抑制技術を用いて、地球上の位置探査システムの信号の干渉を抑制する第2の干渉抑制ユニットと、第2の干渉抑制ユニットから信号を受信する第2の航行ユニットとを具えている。該装置によって実行される航空機の航行を制御する方法も、本発明に含まれる。  (もっと読む)
(もっと読む)
481 - 500 / 523
[ Back to top ]