
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
441 - 460 / 523
複合測位による移動体の測位制御装置、システムおよびプログラム

【課題】衛星からのデータ受信が遮断される場所においても高い精度で連続的な測位を可能とし、その測位結果に基づき移動体のリアルタイム制御を実現する。
【解決手段】衛星航法と慣性航法による複合測位を用いて移動体(建機10)の位置測位を行う測位制御装置100を、複合測位であらかじめ定義された精度が得られるか否かを判定し、必要な精度が得られないと判定された場合、既知点に設置されるトータルステーション30や移動体に設置される車速センサ等、支援センサから出力される測位結果を受信し、当該測位結果を用いて慣性航法による測位誤差を補正する構成とした。
(もっと読む)
移動体位置検出装置、ナビゲーション装置及びプログラム

【課題】状況に応じて衛星航法受信機の受信感度を変更することで、その状況に適した衛星航法測位を行う。
【解決手段】駐車場出庫後等のような極力早いタイミングで位置・方位を修正する必要がある状況では、車載用ナビゲーション装置起動時にGPS受信機を高感度モードに設定することで速度重視の測位を行うことができる(S10,S20)。そして、位置・方位の修正が行われ(S30)、GPS速度ベクトルと自立航法速度ベクトルとがある程度近似した場合(S40:YES)は、高感度モードから低感度モードに切り替えることによって精度重視の測位を行うことができる(S50,S60)。このようにして、状況に適した受信感度でのGPS測位を行うことができるようになる。そして、状況に適したGPS測位に基づいて自立航法による測定結果を補正することで、より適切なマップマッチングを行うことができる。
(もっと読む)
車載器
【課題】 GPS信号やその処理中の信号等に混入したノイズによる測位精度の低下を抑える。
【解決手段】 複数のGPS衛星から発信されたGPS信号を受信可能な受信手段と、受信された複数のGPS信号を用いて車両の移動に関する情報を計測する移動情報計測手段と、計測に用いられたGPS信号にノイズが含まれているか否かを検出するノイズ検出手段と、該GPS信号にノイズが含まれていると検出されたときに、移動情報計測手段での計測に用いられるべきGPS信号の組み合わせリストを作成するリスト作成手段と、作成されたリストに基づいて移動情報計測手段での計測に用いられるべきGPS信号を組み替える信号組替手段とを車載器に備える。リスト作成手段に、受信手段により受信可能な複数のGPS信号の中から少なくとも一以上のGPS信号を除外した残りのGPS信号について可能な全ての組み合わせのリストを作成させる。
(もっと読む)
障害物検知システム、障害物検知方法、プログラム
【課題】障害物を確実に検知するとともに航行者にその旨を適切に通知する。
【解決手段】 航行中にある航行体が障害物を検知すべく当該航行体に設けられる障害物検知システムにおいて、航行区域内に含まれる前記障害物の位置情報を記憶する記憶部と、人工衛星より受信した航法信号に基づいて前記航行体の現在位置を検出する位置検出部と、前記検出された航行体の現在位置に基づいて前記記憶部より現在の前記航行体の近傍に位置する前記障害物を検索する障害物検索部と、当該障害物が検索された場合に警報を出力する警報出力部と、を有する。
(もっと読む)
測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体、測位装置
【課題】移動しつつ現在位置を計算する場合において、出力位置の直進性、連続性及び追従性を向上し、真の位置との乖離が小さい出力位置を算出することができる測位装置の制御方法等を提供すること。
【解決手段】測位装置20が、測位位置情報生成ステップと、測位装置20が、速度情報、加速度情報及び進行方向情報の少なくとも1つを構成要素とする移動状態情報を生成する移動状態情報生成ステップと、測位装置20が、移動状態情報に示される構成要素の変化を示す移動状態変化情報を生成する移動状態変化情報生成ステップと、測位装置20が、移動状態変化情報に基づいて、回帰直線Lを生成するための基礎情報の数を決定する基礎情報数決定ステップと、測位装置20が、回帰直線を生成する回帰直線生成ステップと、測位装置20が、現在時刻における回帰直線L上の位置を示す回帰直線上位置情報を生成する回帰直線上位置情報生成ステップ等を有する。
(もっと読む)
位置補正方法及びナビゲーション装置
【課題】 GPS等によって推定した自動車の鉛直方向の位置を精度良く補正することができる位置補正方法、及びナビゲーション装置を提供する。
【解決手段】 ナビゲーション装置1は、自動車(移動体)が受ける重力加速度の進行方向の成分を重力センサ13で測定し、測定した成分の大きさ及び向きにより、自動車が進行する向きの傾斜角を求め、各瞬間での傾斜角及び車速パルスから、自動車が移動することによる鉛直方向への変位量を求める。ナビゲーション装置1は、求めた鉛直方向への変位量に基づいて、GPSにより推定した自動車の鉛直方向の推定位置を補正し、更に鉛直方向の情報を含む地図データを用いてマップマッチングを行うことにより、自動車の推定位置を精度良く補正する。
(もっと読む)
ナビゲーション装置
【課題】 自立航法用センサからの距離情報を利用できない場合であっても、自車位置を精度良く算出することができる「ナビゲーション装置」を提供する。
【解決手段】 ナビゲーション装置における自車位置の更新方法は、自立航法センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位によるGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図上の道路上にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
(もっと読む)
端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】精度よく現在時刻における位置を推定することができる端末装置等を提供すること。
【解決手段】測位衛星12a等からの信号である衛星信号S1等に基づく測位を行う端末装置20であって、衛星信号S1等を受信する衛星信号受信手段32と、衛星信号S1等に基づいて、端末装置20の位置を示す測位位置情報を生成する測位位置情報生成手段と、回転速度センサ、加速度センサ及び磁気センサで構成される移動履歴計測手段36を制御して、予め規定した規定時間間隔で端末装置20の移動方向及び移動距離で構成される移動ベクトルを示す移動ベクトル情報を生成する移動ベクトル情報生成手段と、測位位置情報と、移動ベクトル情報に基づいて、端末装置20の現在時刻における推定位置を示す推定位置情報を生成する推定位置情報生成手段と、推定位置情報を出力する推定位置情報出力手段と、を有する。
(もっと読む)
空港内で航空機の地上運航を補助するための装置
本発明は、航空機の現在位置を決定するための手段(2)と、地図製作データベース(3)と、運航システム(4)と、航空機の現在の方向を決定するための手段(9)と、監視スクリーン(8)上に少なくとも空港の一部の地図と、その地図上に、前記現在位置に対応する個所に位置し、現在の進行方向を指し示す航空機のシンボルとを表示する表示システム(6)とからなる装置(1)に関するものである。 (もっと読む)
可動物体、特に空港での航空機の地上位置を決定するための方法および装置
本発明は、位置データを周期的に発生するための手段(2)と、慣性データを発生するための手段(3)と、位置データの発生毎にこの位置データに基づき可動物体の位置を決定するための手段(4)と、位置データの2回の連続発生間での可動物体の位置を決定するための手段(5)とからなる装置(1)に関し、上記の2回の連続データ発生間の時隔が、中間時間のより分離される、同じ長さの時間範囲に分割され、上記の手段(5)が、各現在の中間時間に対し、以前の中間時間におけるその位置と、現在と以前の中間時間により形成される時間範囲中のその移動とに基づいて可動物体の位置を決定し、その物体の移動が慣性データにより計算される。 (もっと読む)
車両用信号記録再生装置
【課題】 放送信号と放送信号を記録した位置を特定できる位置情報信号とを同時に記録する一方、記録した放送信号と位置情報信号とを同時に再生することが可能な車両用信号記録再生装置を提供する。
【解決手段】 放送信号を受信して出力する放送信号受信部110と、放送信号の受信位置の情報を有する位置情報信号を検出して出力する位置情報信号検出部200と、放送信号受信部110の出力信号と位置情報信号検出部200の出力信号とを同時に取り込んで記憶する信号記録部と、記憶した放送信号受信部110の出力信号と位置情報信号検出部200の出力信号とを同時に出力再生する信号再生部とを備える。
(もっと読む)
移動局ナビゲーション装置および移動局ナビゲーションプログラム
【課題】 衛星用アンテナやFPU用アンテナを搭載したSNG伝送車(移動局)において、通信衛星やFPU基地局の位置関係を視覚的に提示することが可能な移動局ナビゲーション装置を提供する。
【解決手段】 移動局ナビゲーション装置1は、測定装置2から測定情報を入力する測定情報入力手段11と、測定情報と衛星位置情報とに基づいて、通信衛星の方位情報を算出する衛星方位情報算出部13aと、その方位情報により、移動局の位置を仮想の中心位置とした円環状に、通信衛星のアイコンを表示する衛星位置表示部151aと、測定情報と基地局位置情報とに基づいて、中継基地局の方位情報を算出する基地局方位情報算出部13bと、その方位情報により、移動局の位置を仮想の中心位置とした円環状に、中継基地局のアイコンを表示する基地局位置表示部151aと、を備える構成とした。
(もっと読む)
位置測位装置を有する移動体情報端末
【課題】場面に応じて必要とする測位精度の測位部を選択できるようにする。
【解決手段】高精度の第1測位部21と第1測位部よりも精度の劣る第2測位部22とを切替部24が切り替え、切り替えられた測位部が測位する。切替部24は、選択判定部34が出力する判定信号に従って切り替える。判定条件記憶部32は、判定条件として、移動体情報端末が装備された移動体の速さと所定の設定値との大小関係を示す判定条件式を記憶している。判定条件設定部33は、前記判定条件式を用いて判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は、前記判定条件信号を入力し、また、車速検知部90から前記移動体の速さを入力し、入力した速さが前記設定値以下のときは第1測位部を選択するべき判定を行ない、入力した速さが前記設定値よりも大きい場合には第2測位部を選択するべき判定を行ない、判定結果を判定信号として出力する。
(もっと読む)
GPSロストの予測方法、GPSロストの予測装置及び車両用走行制御装置
【課題】 GPSロストに対してドライバが余裕を持って対応することができるようにする。
【解決手段】 自車両前方の撮像画像において、予め設定した経路上前方距離だけ前方の地点に開空率検出領域Adを設定し(ステップS1〜S3)、この開空率検出領域Ad内の画像に基づいて、前記前方地点に自車両が到達したときの将来開空率を予測する。例えば、開空率検出領域Adにおいて、空の領域の面積を検出し、この開空率検出領域Adにおける前方開空率を算出し、これを将来の開空率をする(ステップS4)。この将来の開空率がそのしきい値以下であるとき、GPSロストが生じると判断し(ステップS6)、これをドライバに通知する(ステップS8)。
(もっと読む)
移動局の横滑角計測装置
【課題】 横滑角の精度を高めた移動局の横滑角測定装置を提供する。
【解決手段】 移動局に搭載した角速度センサ10およびGPS演算装置12と、移動局の重心に搭載した加速度センサ14と、角速度センサ10から得られるヨー角速度(r)と横滑角速度(dβ/dt)とを加算した値と、加速度センサ14から得られる公転加速度(d2y/dt2)をGPS演算装置12から得られる前進速度(v)で除した値とに基づいて積分を行うことで積分値(I)を求め、当該積分値(I)を横滑角(β)として算出する横滑角算出手段20とを有する。加速度センサ14を重心に搭載するので、横滑角速度(dβ/dt)に起因する加速度の混入が防止され、公転加速度(d2y/dt2)のみを検出できる。このように加速度センサ14へ横滑角速度(dβ/dt)に起因する加速度の混入を防止した点で、横滑角(β)の精度が高められる。
(もっと読む)
車載用ナビゲーション装置
【課題】 絶対傾斜角を検出することによって、傾斜を有する地点においても自車位置を高精度に検出することができ、ひいては、自車を目的地まで迅速かつ適切に案内することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】 自車の進行方向に対する自車の絶対的な傾斜角度である絶対傾斜角を計算する絶対傾斜角計算手段32と、この絶対傾斜角計算手段32によって算出された前記絶対傾斜角に応じたジャイロセンサ6の感度の補正を行う補正手段33とを備えたこと。
(もっと読む)
位置認識マルチモーダルマルチ言語デバイス
位置ベースの技術(たとえば全地球測位システム(GPS))を使用して、マルチモーダル、マルチ言語の、位置ベースサービスの提供を容易にすることができる。位置の識別により、ユーザの状態および意図の識別に関して重要なコンテキストを提供することができる。したがって、位置識別は、データおよびサービスの提供/増補(たとえば、位置認識ベースの提案、位置に基づいた連絡先リストの切り捨て、ユーザが所定の位置に近づいた際の位置ベースの注意喚起、事前にロードされたタスクの切り捨て、PIM内に事前にロードされたタスクを実施するためのルートの提案)を容易にすることができる。さらに他の態様は、方位磁石、加速度計、方位角制御、セルラ式三角測量、電話のSPOTサービスなどを使用して、GPS位置識別を増補することができる。事実上、これらの代替諸態様では、ユーザおよび/またはポータブルデバイスの動きおよび方向を検出することによって、ターゲット位置の特定を容易にすることができる。 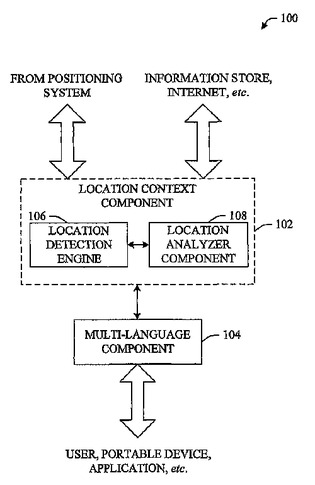 (もっと読む)
(もっと読む)
測位装置
【課題】
周波数の推定に要する時間を短縮し、誤った周波数でロックされることのない測位装置の提供を図る。
【解決手段】
測位装置16は、信号処理部4で、測位用衛星Gからの信号を第1のPLL回路により追尾し、測位用衛星Fからの信号を第2のPLL回路により追尾する。インターフェイス20で移動体の移動情報を受け付ける。測位演算部15で、衛星Gと衛星Fの移動によるドップラーシフトと、ドップラーシフトの移動体の移動分と、衛星発振器のドリフトと、衛星Gを追尾するための第1のPLL回路の周波数修正値と、から、衛星Fを追尾するための第2のPLL回路の周波数修正値を算出する。
(もっと読む)
移動体端末用アンテナ追尾装置および移動体端末用アンテナ追尾方法
【課題】指向性可変アンテナを容易に通信衛星へ指向させることが出来る移動体端末用アンテナ追尾装置および移動体端末用アンテナ追尾方法を提供する。
【解決手段】準天頂衛星が配信する端末制御情報は、地球上の各地点から見た準天頂衛星の方角情報を含んでいる。GPS受信部22は、移動体端末10の現在位置を検出し、指向性制御部28はまず、フェーズドアレイアンテナ11の指向性を比較的広く制御する。端末制御情報受信部23は、フェーズドアレイアンテナ11を介して端末制御情報を受信し、姿勢角センサ25および方位センサ26は、移動体端末10の3次元の姿勢角を検出し、アレイファクタ計算部27は、端末制御情報に姿勢角分の補正を施して、アレイファクタ情報をアレイファクタ記憶部21から検索する。指向性制御部28は、補正された指向性制御情報を基にフェーズドアレイアンテナ11の指向性をより狭く制御し準天頂衛星へ指向させる。
(もっと読む)
測位装置
【課題】
車体の状態値の測定が精度良く行える測位装置を提供することを図る。
【解決手段】
測位用衛星からの信号に基づいて電波受信地点の測位を行う測位部6と、移動体の状態値を検出するセンサ7と、を備え、トリガ信号発生部によりトリガ信号を所定周期で発信し、前記トリガ信号をトリガとして、キャリアNCOの周波数を前記測位用衛星からの信号に同調させ、第1のトリガ信号から第2のトリガ信号までの期間における、電波受信地点の移動量を測定するとともに、第1のトリガ信号から第2のトリガ信号までの期間における、前記センサの検出する状態値の変化量を測定する。
(もっと読む)
441 - 460 / 523
[ Back to top ]