
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
401 - 420 / 523
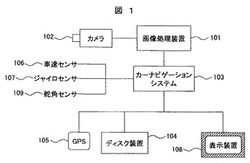
車両位置測位装置
【課題】ジャイロと車速センサを用いた自律航法とマップマッチングの組合せによる自車位置の測定では、実際の自車位置とカーナビが保持している自車位置がずれる。
【解決手段】撮像した画像から白線を抽出する白線抽出手段と、画像を処理して自車と白線との距離を求める手段と、一定時間内における白線との距離の変化を算出する距離変化算出手段と、一定時間内の走行距離を測定する走行距離測定手段とを有し、白線との距離の変化と走行距離を用いて自車の走行ベクトルを算出し、前回計測した自車位置に走行ベクトルを加算して自車位置を計測する。または、自車の前輪の舵角を得るための手段と、一定時間内における舵角の平均値を用いて一定時間内における自車の進行方向を算出する手段と、一定時間内の走行距離を測定する手段とを有し、進行方向と走行距離を用いて自車の走行ベクトルを算出する。
(もっと読む)
GPS測位による位置算出装置

【課題】 GPS測位環境や移動体の高さ方向の動きを監視して、3次元測位を判定するためのしきい値を動的に決定する「GPS測位による位置算出装置」を提供する。
【解決手段】 GPS測位を利用して移動体の位置を算出する位置算出方法は、GPS測位環境の良否を判定するステップと(S101)、測位環境が悪いと判定されたとき、しきい値を下げるステップと(S102)、測位環境が良好と判定された場合に移動体の高さ変動があるか否かを判定するステップ(S103)と、高さ変動があると判定されたとき、しきい値を上げるステップと(S104)を含み、PDOP値がしきい値より大きい場合には2次元測位を行い、PDOP値がしきい値以下の場合には3次元測位を行う。
(もっと読む)
車両位置予測方法及び装置
【課題】GPS三次元測位が不能になった後三次元測位が再開されたとき、その間の勾配が大きくても正確な車両位置の選択が可能な車両位置予測方法及び装置とする。
【解決手段】GPSで三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、走行履歴と車速データにより現在の車両位置から移動する可能性のある予測移動範囲を演算し、GPSによる三次元測位が行われないとき、二次元測位、或いはジャイロと車速信号により車両位置を予測する。GPS測位車両位置が前回演算した予測移動範囲に存在するときには、通常その車両位置を採用し、存在しないときには前記予測した車両位置を採用する。しかし、三次元測位から二次元測位等に切り替わり再度三次元測位を行うとき、その間の距離が所定以上で勾配が所定以上の時には、三次元測位再開時の測位地点が予測移動範囲に存在しないときでも三次元測位位置を選択し、以前の走行履歴を削除する。
(もっと読む)
測位装置及び測位方法
【課題】電波航法により絶対位置、絶対速度を得ることができない場合、或いは、電波航法による測位精度が低い場合でも、自律航法における測定誤差を的確に推測する。
【解決手段】電波を受信している衛星の数や配置等に基づいて、電波航法で得られる絶対測位情報が高信頼度であるかを判定し(ステップS2)、高信頼度であるときには、電波航法による絶対測位情報を利用して、自律航法による測位結果の測定誤差を推定する(ステップS4)。電波航法による絶対測位情報が高信頼度でない場合は、捕捉衛星の中から受信パワーや仰角がしきい値よりも大きい高信頼度衛星を選択し(ステップS5)、この高信頼度衛星との間の擬似距離及びドップラ周波数を算出しこれを利用して、自律航法による測位結果の測定誤差を推定する(ステップS6)。そして推定した測定誤差を用いて自律航法による測位結果を補正し、測位装置10本体の測定位置を得る。
(もっと読む)
簡易走行路測定システム
【課題】簡易な手法で手軽に軌道の検測を行うことができる簡易走行路測定システムを提供する。
【解決手段】走行路測定システム1は、測定時に車両に搭載される衛星からの電波を受信して前記車両の速度情報を出力するGPS受信機10と、車両の動揺情報を出力する動揺センサ20、各種演算を行うPC30を備える。PC30は、速度情報及び動揺情報を受信して、時間軸上の前記動揺情報を時間軸・距離軸変換し、距離軸上にサンプリングされた動揺情報を算出する。
(もっと読む)
位置情報提供システム
【課題】 路側に多くのセンサーを配備設置することなく、多くの移動体の所在位置を認知および提供できる位置情報提供システムを提供すること。
【解決手段】 小型電波発信器11からの電波を受信するアンテナ17と、この受信電波を以後の処理方式に合った周波数に変換する周波数変換部18と、アナログ信号をディジタル信号に変換するA−D変換部19と、受信電波の到来方向を推定処理する到来方向推定処理部20と、受信電波の画像処理と前記移動体12との距離を画像演算処理する画像化処理部21と、受信電波の受信範囲内の背景を撮影する撮影部22と、その背景と画像化処理部21による電波の可視化画像とを合成処理する画像合成処理部23と、受信電波の発信位置が位置情報として取得対象か否かを判定する保護対象判定処理部24と、取得された固有情報を解読するRFID受信解読処理部25と、カーナビゲーション位置情報26と固有情報とをVICS入出力部27に出力する位置情報生成処理部28などとからなる。
(もっと読む)
ナビゲーション・システム内での反復拡張カルマン・フィルタを実施する方法及び装置
【課題】慣性測定装置、位置決め装置及び処理装置(70)を備える車両用のナビゲーション・システム(10)を提供する。
【解決手段】慣性測定装置は、車両の運転に関する第1のセットのデータを提供するように構成され、位置決め装置は、車両の運転に関する第2のセットのデータを提供するように構成れる。処理装置は、慣性測定装置及び位置決め装置が提供するデータのセットを受信するように構成され、処理装置は誤差処理装置を備える。誤差処理装置は、処理装置が受信したデータのセットに関係する時間更新誤差状態及び測定更新誤差状態を用いてプログラムされるものであり、第1の基準に基づいて時間更新誤差状態及び測定更新誤差状態の双方を繰り返し、第2の基準に基づいて測定更新誤差状態のみを繰り返すように構成される。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】静止時における出力位置の精度を向上させることができる測位装置等を提供すること。
【解決手段】測位衛星12a等からの信号である衛星信号に基づいて、測位を行う測位装置20であって、前回測位時と現在測位時との間における測位装置20の移動量を特定する移動量特定手段と、移動量が予め規定した許容移動範囲内か否かを判断する移動量評価手段と、衛星信号に基づいて、測位装置20の測位位置を算出する測位位置算出手段と、 移動量評価手段が、移動量が予め規定した許容移動範囲内であると判断した場合に、前回測位時の測位位置P0と現在の測位位置P1とを平均化処理して平均位置Q1を算出する平均位置算出手段と、平均位置Q1を出力する位置出力手段と、を有する。
(もっと読む)
携帯電子機器の状態を追跡する方法
本発明は、携帯電子機器の状態を追跡する方法と、前記方法を実行するように構成される処理装置を備える携帯電子機器とに関する。携帯電子機器の状態を追跡する方法であって、(i)前記携帯電子機器の前記状態を、複数のセルを含む格子を用いて表すことであって、前記セルの各々は、1つ以上の状態変数により規定される状態空間における領域を表すと共に、前記携帯電子機器の前記状態が状態空間におけるその領域内にある確率値を有し、前記格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、(ii)1つ以上の状態変数の値を示す測定信号を入手することと、(iii)前記格子の前記確率値を更新し、前記格子を再び境界付けることとを、反復的に実行することを含む方法が提供される。 (もっと読む)
車載器
【課題】測位誤差を良好に除去して精度の高いGPS測位結果を安定的に取得する。
【解決手段】所定の基準値に対する車両の高度方向の変位量を推定する高度変位推定手段と、推定される変位量の絶対値が所定の閾値よりも大きいか否かを判定する変位量判定手段とを備え、該変位量が該閾値よりも大きいと判定され且つGPSにより少なくとも高度の測位が成されたとき、カルマンフィルタの機能をリセットする車載器を提供する。
(もっと読む)
測位システム、測位方法及びカーナビゲーションシステム
【課題】受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供すること。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
(もっと読む)
位置算出装置の誤差円の決定方法
【課題】 GPS位置の測位誤差を表す誤差円を測位環境に応じて再決定する「位置算出装置の誤差円の決定方法」を提供する。
【解決手段】 誤差円の決定方法は、GPSにより測位された一定期間Tcの走行距離Dpと自立航法センサにより測位された前記一定期間Tcに対応する走行距離Dqとの比率を表す走行距離比率に基づきGPS測位によるGPS位置の誤差円Rを決定するステップと、自立航法センサにより測位された航法位置がGPS位置の誤差円Rに含まれないと判定されたとき、走行距離Dpと走行距離Dqを算出するための前記一定期間Tcを予め決められた期間Tsだけ延長させ誤差円Rを再決定するステップとを有する。
(もっと読む)
位置算出装置の進行角決定方法
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
自律移動装置
【課題】実使用環境においてアレイ応答ベクトルをキャリブレーションすることにより、実使用環境での位置の検出精度を高めることができる自律移動装置を提供する。
【解決手段】電波発信器は絶対座標系における位置が既知であって電波を送信する。アンテナ21は3台以上の電波発信器からの電波を受信し、到来方位推定部23においてアレイ応答ベクトルに相当するパラメータをパラメータ格納部26に照合することにより電波の到来方位を推定する。測位処理部25は電波発信器の既知の位置と電波の到来方位とを用いて自己位置を求める。キャリブレーション動作では、アンテナ21が電波発信器に対して規定の位置関係である状態で、レーザレーダ5により実測した電波発信器の方位とアンテナ21から出力されているアレイ応答ベクトルに相当するパラメータとを対応付けてパラメータ格納部に書き込む。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことができ、ひいては、ミスマッチングを防止してナビゲーションの際に自車を目的地まで適切に案内することができる「自車位置判定装置」を提供すること。
【解決手段】自車位置の判定を行う自車位置判定装置14であって、捕捉されたGPS衛星の個数が所定数以下の場合に、前記自車位置の判定として自車が屋内に存在する旨の判定である屋内判定を行う屋内判定手段28を備えたこと。
(もっと読む)
位置検出システム
【課題】 移動体ごとに面倒な校正登録作業などの初期設定を要することなく、可動式の走査器を要することもなく、高い精度と信頼性をもって移動体の位置を検出することが可能な位置検出システムを提供する。
【解決手段】 光学ビーコン♯2〜♯6が、発光順序が自身より2つ前の光学ビーコンから発せられる光および自身より1つ前の光学ビーコンから発せられる光のいずれかを受けることにより、発光する。
(もっと読む)
移動状態検出装置
【課題】移動体の加速、減速にかかわらず、常に正確に移動体の移動状態を判定することができる移動状態検出装置を提供することを目的とする。
【解決手段】本発明は、移動体速度を算出する速度算出部、例えばGPS受信機2と、移動体の進行方向に対する運動加速度を検出する加速度センサ3と、移動体の前進、後退を判定する移動状態判定部6とを備え、移動状態判定部6が移動体の運動加速度を単位時間だけ積分した値と、前記単位時間における移動体速度の大きさの差分とに基づいて移動体の前進、後退を判定することを特徴とする。これにより、移動体の加速、減速にかかわらず、常に正確に移動体の前進、後退を判定することができる。また、この情報とGPS速度から正確な方位を得ることができる。
(もっと読む)
姿勢標定装置、姿勢標定方法および姿勢標定プログラム
【課題】姿勢角の標定処理において、少なくとも1本の基線ベクトルに対する二重位相差の観測値が得られる場合に姿勢角の誤差の拡大を抑えることを可能にする。
【解決手段】二重位相差算出部120は複数のGPS受信機952が観測した搬送波位相に基づいて二重位相差の観測値を算出する。また、二重位相差推定部130は姿勢角の標定値に基づいて二重位相差の推定値を算出する。次に、二重位相差残差計算部140は二重位相差の観測値と二重位相差の推定値との差分を算出する。そして、カルマンフィルタ150は二重位相差の観測値と推定値との差分に基づいて補正量を算出し、姿勢角計算部110はジャイロ953が測定したレートを積分して算出した姿勢角の計算値を補正量で補正して姿勢角の標定値を算出する。
(もっと読む)
測位システム、測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】自動車の中の任意の位置において、かつ、使用者の任意の姿勢において使用することができる、車両情報及び衛星電波を使用する測位システム等を提供すること。
【解決手段】車両情報提供装置20は、車両情報を無線で送信する無線送信手段等を有し、測位装置50は、車両情報提供装置20から、車両情報を無線で受信する無線受信手段と、車両情報に基づいて、速度ベクトル情報を生成する速度ベクトル情報生成手段と、車両15の現在の推定位置を示す推定位置情報を生成する推定位置情報生成手段と、衛星電波を使用して測位位置を示す衛星測位位置情報を生成する衛星測位位置情報生成手段と、推定位置と測位位置との平均位置を示す平均位置情報を生成する平均位置情報生成手段と、平均位置情報が生成されている場合には平均位置情報を出力し、平均位置情報が生成されていない場合には推定位置情報を出力する位置出力手段等を有する。
(もっと読む)
測位端末
【課題】測位端末において、測位結果の表示にかかる時間や通信コストを削減し、異なる測位方式であっても単一の端末で測位可能とする。
【解決手段】測位端末1は、自律測位部11、無線測位部12、推測航法部13、位置補正部14、測位演算部15、位置情報表示部16および測位ソフトウェア記憶部18を備える。自律測位部11が測位端末1の所持者の歩行動作に応じて慣性データを出力し、推測航法部13がその慣性データから位置情報を推定する。一方、無線測位部12および測位演算部15は、測位ソフトウェア記憶部18からロードされた測位ソフトウェアをCPUが実行することによって動作し、無線信号の周波数、変調方式、測位方式に応じて無線信号の受信、復調、測位演算などを行う。位置補正部14は、推測航法部13および測位演算部15から入力した位置などから位置情報を補正する。そして、位置情報表示部16が、位置情報を表示する。
(もっと読む)
401 - 420 / 523
[ Back to top ]