
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
341 - 360 / 523
移動体位置測位装置
【課題】測位モードを適切に切り替えて精度の高い測位を行うこと。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号のコード位相に基づいて移動体の位置を測位する第1測位手段と、前記移動体の位置に関する情報を取得する位置情報取得手段と、前記位置情報取得手段により取得された位置情報と、衛星からの搬送波の周波数のドップラ成分の計測値とに基づいて、移動体の位置を測位する第2測位手段と、前記第1測位手段による第1測位モードと前記第2測位手段による第2測位モードとを切り替えるモード切替手段とを備え、前記モード切替手段は、前記位置情報取得手段により所定レベル以上の信頼性の高い位置情報が取得された場合に、前記第1測位手段による第1測位モードから前記第2測位手段による第2測位モードに切り替えることを特徴とする。
(もっと読む)
センサ誤差推定装置及び観測装置及び方法及びプログラム

【課題】計測誤差を推定し、推定した計測誤差で計測量を補正する観測装置において、誤差推定の進捗度を正しく見積もる。
【解決手段】誤差推定部130は、距離及び距離変化率観測部112が観測した擬似距離などに基づいて、車速パルス発生器121・ジャイロスコープ122などが計測した速度・角速度などの計測誤差を推定し、推定した計測誤差の推定誤差を算出する。進捗度算出部151は、誤差推定部130が算出した推定誤差に基づいて、誤差推定の進捗度を算出する。
(もっと読む)
移動局の速度計測装置
【課題】サイクルスリップが発生しても、GPSによる速度計測ができない時間を少なくして移動局の走行速度を計測できる移動局の速度計測装置を提供する。
【解決手段】第1速度計測手段23は、測位手段22からのドプラー周波数Daに基づいて求められるドプラー速度と、加速度を積分して得られる積分速度との差に応じて最適な混合比で融合して移動局の走行速度V1を計測する。第2速度計測手段25は、測位手段22からの移動局の位置Dbに基づいてTD法により移動局の走行速度V2を計測する。切替制御手段24は、サイクルスリップが発生後、サイクルスリップからの回復の初期段階は第1速度計測手段23により上記走行速度V1を計測し、サイクルスリップが発生しないときは第2速度計測手段25により上記走行速度V2を計測するように切り替え制御を行う。この制御により、速度計測の空白期間が少なくなる。
(もっと読む)
移動体位置検出方法および移動体位置検出装置
【課題】リアルタイムで精度良く移動体の現在位置および方位角を検出することの可能な移動体位置検出方法を提供する。
【解決手段】一のGPSデータを始点として導出された時刻taにおける移動体の位置(xg(ta),yg(ta))および方位角(orig(ta))と、その次のGPSデータから得られた時刻taにおける移動体の位置(xg’(ta),yg’(ta))および方位角(orig’(ta)) とを含む予想誤差(ΔDx,ΔDy,ΔDori)に、その予想誤差(ΔDx,ΔDy,ΔDori)の確率密度関数(Px,Py,Pori)を含む補償係数(Kx,Ky,Kori)を乗算することにより導出される補償量(Cx,Cy,Cori)を用いて、時刻ta以降の移動体の位置(xg(ti),yg(ti))および方位角(orig(ti))を特定する。
(もっと読む)
位置検知方法
【課題】 絶対位置検知装置による移動軌跡に相対位置検知装置による移動軌跡をフィッティングさせる際に、少ない種類のパラメータで相対位置検知装置の位置を高精度に決定し維持する位置検知方法を提供する。
【解決手段】 相対位置検知装置の出力値と絶対位置検知装置の出力値とを併用して位置を検知する位置検知方法において、絶対位置検知装置の移動軌跡に相対位置検知装置で求めた移動軌跡をフィッティングさせるための回転角および移動量を求め、相対的位置検知装置の最新位置を上記回転角および移動量で補正し、補正された位置から新たな移動軌跡の検知を開始し、絶対位置検知装置の利用可能な新たな位置情報が得られるまでは、相対位置検知装置の出力値を上記回転角および移動量で補正し続ける。絶対位置検知装置の高精度区間における移動軌跡を用いて、相対位置検知装置の位置を補正できる。
(もっと読む)
携帯ナビゲーションシステム、携帯ナビゲーション方法、携帯ナビゲーション用プログラム及び携帯端末
【課題】 携帯端末でナビゲーション機能を備えている場合に、自己の測位した現在位置
情報の信頼性が低下する場合に、外部の現在位置情報を収集して、収集した現在位置情報
と自己の測位した現在位置情報とに基づいて正確な現在位置情報を求める。
【解決手段】 現在位置情報を近距離無線通信手段31,41,51,61を介して送信
する複数の位置情報送信部3A〜3Dと、該複数の位置情報送信部における夫々の近距離
無線通信手段と通信可能な近距離無線通信手段25を有し、ナビゲーション機能を有する
携帯端末2とを備え、前記携帯端末2は、自己の近距離無線通信手段25を介して前記位
置情報送信部3A〜3Dから現在位置情報を受信したときに、受信した現在位置情報に基
づいて現在位置を決定するように構成されている
(もっと読む)
慣性航法システムを増補するシステムおよび方法
【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
自律移動装置
【課題】マルチパス環境下においても精度良い測位ができ、走行経路に対して精度良く走行することができる自律移動装置を提供することにある、
【解決手段】自律移動装置1の測位部3は、平面内で規定した絶対座標系における座標位置を既知位置に配置された少なくとも3台の電波発信器21〜23からの電波の到来方位を用いて検出する。この際測位アルゴリズム処理部35は、電波発信器21〜23の少なくとも一つについて直接波と反射波とを共に設定し、直接波と反射波との別を考慮して電波発信器21〜23を3つ選択して組にし、各組毎に、各電波発信器からの電波の到来方位を用いて求めた座標位置から既知の電波発信器21〜23を見込む時の各電波発信器21〜23の存在方位を求めるとともに、到来方位と存在方位とを照合して到来方位と存在方位ととが整合すると判定された直接波と反射波との別を考慮した電波発信器の組から得られた座標位置を採用する。
(もっと読む)
ナビゲーションシステム、およびGPS測位解精度判定方法
【課題】マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知する。
【解決手段】複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段と、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断するナビゲーションシステムを提供する。
(もっと読む)
LOSリンク予測および測定前LOS経路フィルタリングを用いた三辺測量のための方法および装置
三辺測量のための方法は、複数のLOS経路の各々を経由して信号を受信するステップと、各LOS経路の性能を予測するステップとを含み得る。この方法はまた、性能が所定の閾値に満たない、LOS経路経由で受信した信号をフィルタリングによって除去するステップを含み得る。この方法はさらに、装置の位置を実質的に決定するために、フィルタリングされていない信号を用いて三辺測量を行なうステップを含み得る。 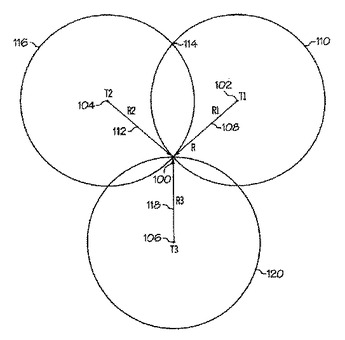 (もっと読む)
(もっと読む)
計測装置及びマルチパス判定方法及び計測方法
【課題】受信したGPS信号などがマルチパスであるか否かを正確に判定することにより、位置などの計測精度を高める。
【解決手段】受信装置111がGPS信号(電波)を受信する(S11)。擬似距離計測部112がGPS信号に基づいて擬似距離を算出し、擬似距離差算出部113が擬似距離の変化量(擬似距離差)を算出する(S12〜S14)。位相距離差計測部114がGPS信号に基づいて位相距離の変化量(位相距離差)を算出する(S15〜S16)。マルチパス判断部115が、擬似距離差と位相距離差とを比較して、受信装置111が受信したGPS信号がマルチパスであるか否かを判断する(S17)。位置算出部130は、マルチパス判断部115がマルチパスであると判断した擬似距離を棄却し、それ以外の擬似距離に基づいて、現在位置を算出する(S18)。
(もっと読む)
移動体位置測位装置
【課題】マルチパス発生中におけるマルチパス終了判定の誤判定を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星10からの信号を受信する受信手段20Aと、移動体の速度ベクトルVを算出する速度ベクトル算出手段60Aと、移動体の位置を測位する測位演算手段40と、測位結果の履歴に基づいて移動体の移動量を表す変位ベクトルMを算出する変位ベクトル算出手段50と、速度ベクトルVと変位ベクトルMとのなす角度を評価値として算出する角度算出手段と、評価値に基づいて測位演算手段の測位の異常を判定する異常判定手段72とを備え、異常判定手段72は、前記評価値が所定閾値Th1以上となった場合に、測位に異常がある旨の異常判定をし、該異常判定時から前記評価値が所定閾値Th3未満となる間の時間又は移動体の移動距離が、所定時間Th5又は所定距離を越えた場合には、前記異常判定を解除し、所定時間又は所定距離を越えない場合には、前記異常判定を維持することを特徴とする。
(もっと読む)
移動体用測位システム及びこれに用いる装置
【課題】早期に擬似距離のばらつきを収束させること。
【解決手段】第1移動体に設けられ、衛星からの信号の受信結果に基づいて該衛星と該第1移動体との間の擬似距離を算出する第1擬似距離算出手段と、第2移動体に設けられ、前記衛星からの信号の受信結果に基づいて該衛星と該第2移動体との間の擬似距離を算出する第2移動体側擬似距離算出手段と、前記第1移動体及び前記第2移動体のうちの少なくとも一方の移動体に設けられ、前記第1移動体と前記第2移動体との間の距離を算出する手段と、前記算出された衛星と第2移動体との間の擬似距離、及び、前記算出された第1移動体と前記第2移動体との間の距離を用いて、前記第1移動体と衛星との間の擬似距離を算出する第2擬似距離算出手段と、前記第1及び第2擬似距離算出手段によりそれぞれ算出された擬似距離を結合して、1つの結合擬似距離を算出する結合擬似距離算出手段と、該結合擬似距離算出手段により算出された前記結合擬似距離を用いて前記第1移動体の位置を測位する測位演算手段とを備える。
(もっと読む)
GPS受信機および位置検出方法
【課題】コストを増大させることなく、位置検出精度を向上させること。
【解決手段】GPS受信機は、x軸上に並べられたアンテナ素子A0,Axと、x軸に直交するy軸上に並べられたアンテナ素子A0,Ayとを有するアレイアンテナを備え、このアレイアナテナによって受信された衛星信号に基づいて、基準方角に対する衛星信号の到来角度を推定し、推定した到来角度と衛星信号の軌道情報から求められる到来角度との角度差分が基準値未満であるか否かを判定し、角度差分が基準値未満であった場合に、当該衛星信号を用いて位置検出を行う。
(もっと読む)
移動体位置測位装置
【課題】移動体が停止している状況下で、衛星信号の搬送波位相の計測結果を用いずに別の手段により擬似距離変化量を推定して、擬似距離のフィルタリングを可能とする。
【解決手段】本発明による移動体位置測位装置1,2,3は、衛星10と車両90の間の擬似距離ρ’を算出する擬似距離算出手段20A,20Bと、移動体が停止したか否かを判定する停止判定手段70と、衛星の位置を算出する衛星位置算出手段60と、擬似距離変化量Δρを推定する擬似距離変化量推定手段50A,50B,50Cと、擬似距離と擬似距離変化量とに基づいて、移動体の位置を測位する測位手段40とを備え、前記擬似距離変化量推定手段は、前記停止判定手段により移動体の停止が判定された場合に、前記衛星位置算出手段により算出される衛星の位置の変化履歴を用いて、前記擬似距離変化量を推定する。
(もっと読む)
移動体位置測位装置
【課題】複数の測位手段を用いて効率的に且つ精度良く移動体位置を測位すること。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号の観測データに基づいて瞬時測位方法により移動体の位置を測位する第1測位手段と、過去の移動体の位置の測位結果と、移動体の速度情報とを用いて、移動体の位置を測位する第2測位手段と、過去の前記第1又は第2測位手段の測位結果から得られる変数解を用いて、移動体の位置を測位する第3測位手段と、前記各測位手段のうち測位処理を実行する測位手段を選択する制御手段60とを備え、前記制御手段は、選択した測位手段の測位結果の信頼性が所定基準値より低い場合に、別の測位手段を選択して測位処理を実行させることを特徴とする。
(もっと読む)
SPS受信装置およびSPS受信機能付き移動通信端末装置
【課題】SPS受信装置において、衛星電波の受信が途切れたときに衛星電波をより早く再補足することができるようにする。
【解決手段】SPS受信装置に、SPS受信機が置かれている状況変化をSPS受信周波数のサーチ範囲を変更するトリガーとして検出するトリガー検出手段と、SPS受信周波数のサーチ範囲を変更するサーチ範囲補正制御手段を設け、トリガー検出手段によりSPS受信機が置かれている状況について所定の状況変化が検出されたときは、サーチ範囲補正制御手段により、SPS受信周波数のサーチ範囲を拡大あるいは縮小して衛星電波を受信する。
(もっと読む)
移動体位置測位装置
【課題】停車判定を適切に行い、停車状態に起因した移動体位置情報の変動を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星航法と慣性航法とを併用して移動体位置情報を導出する移動体位置情報導出手段と、加速度センサ及び/又は角速度センサの出力値に基づいて移動体が停止しているか否かを判定する第1移動体停止判定手段と、車速を表すことができる車載センサの出力値等に基づいて移動体が停止しているか否かを判定する第2移動体停止判定手段と、前記第1移動体停止判定手段により移動体が停止していると判定されたとき、そのときの前記移動体位置情報を記憶する記憶手段と、前記第1移動体停止判定手段により移動体が停止していると判定された後に前記第2移動体停止判定手段により移動体が停止していると判定された場合に、前記記憶手段に記憶された移動体位置情報を、現在の移動体位置情報として出力する。
(もっと読む)
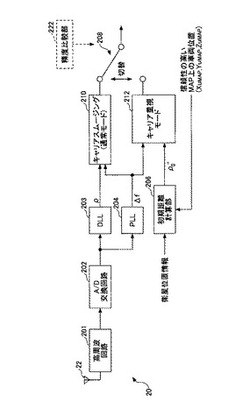
衛星測位システムの初回測位時間を改善する方法およびシステム
衛星測位システム(SPS)アンテナ支援装置(100)は、SPS受信器(102)、方位値、チルト値または加速度値を決定するための環境センサ(106)、およびプロセッサ(104)を有する。前記プロセッサは、方位を決定し(306)、視野内の衛星に対してピークアンテナ利得の推定方向を決定し(304)、ピークアンテナ利得の推定方向と環境データとに基づいて、視野内の衛星の一部の捕捉試行を優先させる(308)ようにプログラムできる。前記プロセッサは、仮定ピーク利得を有する衛星の検索に、より短い滞留時間を用い、より低い利得を有する衛星の検索に、より長い滞留時間を用いるように相関器を分割して分割検索を実行できる(310)。前記装置は、ピークアンテナ利得の推定方向に基づいて、SPS受信器の方位を考慮してユーザに配向ガイドを電子的に提示できる(312)。 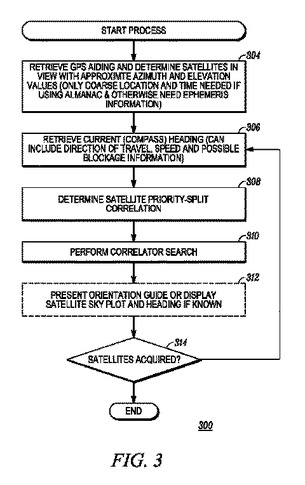 (もっと読む)
(もっと読む)
自車位置算出装置
【課題】 車速パルス信号を利用することができない車両であっても自車位置を算出可能な「自車位置算出装置」を提供する。
【解決手段】 自車位置算出装置30は、GPS衛星の測位からGPS速度等の情報を生成するGPS測位情報作成部50と、車両34からの車速パルス信号が入力されず、かつGPS測位情報生成部50から得られたGPS速度が変化したとき、車速パルス信号を利用することができないと判定する判定部52と、車速パルス信号を利用することができないと判定されたとき、GPS速度に基づき擬似車速パルス信号を生成する擬似車速パルス信号生成部54と、擬似車速パルス信号に基づき自車位置を算出する自車位置算出処理部42とを含んで構成される。
(もっと読む)
341 - 360 / 523
[ Back to top ]