
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
361 - 380 / 523
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
ポータプルの測位およびナビゲーション・システム

【課題】未知の領域でのナビゲーションを補助するナビゲーション・システムを提供する。
【解決手段】ナビゲーション・システムは、複数の無線周波数識別(RFID)タグと、少なくとも1つのポータル端末と、少なくとも1つのナビゲーション・デバイスとを含む。複数のRFIDタグは、移動する領域全体にわたって配置される。少なくとも1つのポータル端末は、移動する領域への入口付近に配置する。少なくとも1つのポータル端末は、移動する領域のマップをアップロードする。マップは、各RFIDタグの位置を含む。少なくとも1つのナビゲーション・デバイスは、ポータル端末からマップをダウンロードする。少なくとも1つのナビゲーショナル・デバイスは、更に、複数のRFIDタグの1または複数のものを検出し、それに少なくとも部分的に基づいて、移動する領域内でのそのデバイスの位置を表示する。
(もっと読む)
GPSの精度を自動的に向上するナビゲーション装置
本発明は、位置測定装置から位置情報を受信するように構成されるプロセッサを具備するナビゲーション装置に関する。プロセッサは、運動検出器から運動情報を受信し、前記運動情報を使用して前記装置が静止中であるかを判定するように更に構成される。装置が静止中であると判定された場合、プロセッサは、装置が静止中である期間に位置測定システムから受信される連続した位置に関する情報を使用してある期間にわたる平均位置を計算する。平均位置は、ユーザに命令を与える等のナビゲーションの目的で使用される。静止中に平均することにより、更に適切な命令を与えるために使用される更に正確な位置が判定される。 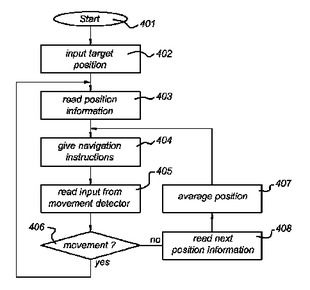 (もっと読む)
(もっと読む)
移動体用衛星電波受信機
【課題】マルチパスが発生したか否かを精度良く検出すること。
【解決手段】本発明に係る移動体用衛星電波受信機は、実測ないし推定に基づいて導出される範囲であって、マルチパスが無い状況下での相関ピーク値PCAの取りうる範囲を、第1閾値範囲として設定すると共に、実測ないし推定に基づいて導出される範囲であって、同状況下での擬似雑音コードのコード位相に対するレプリカ擬似雑音コードのコード位相の位相ずれ量Δφの取りうる範囲を、第2閾値範囲として設定する閾値範囲設定手段140と、受信した衛星信号に対して算出された前記相関ピーク値と前記コード位相のずれ量が、前記閾値範囲設定手段で設定された第1閾値範囲及び第2閾値範囲内にそれぞれあるか否かを判定する判定手段142と、前記算出された前記相関ピーク値と前記コード位相のずれ量の少なくともいずれかがそれぞれの閾値範囲内に無いと判定された場合に、マルチパスが発生したと判断するマルチパス検出手段144と、を備える
(もっと読む)
測位装置、携帯型電子機器及びプログラム
【課題】測位精度の向上を実現すること。
【解決手段】携帯型電話機1の近距離無線通信部50が、移動体である自動車2の近距離
無線通信部250との間で通信可能な状態にあることが検出されなかった場合は、携帯型
電話機1自身の移動状況の情報である端末移動状況情報及び複数のGPS信号に基づいて
現在位置の測位が行われる。一方、近距離無線通信部250との間で通信可能な状態にあ
ることが検出された場合は、自動車2の移動状況の情報である移動体移動状況情報が取得
され、移動体移動状況情報及び複数のGPS信号に基づいて現在位置の測位が行われる。
(もっと読む)
干渉および電波妨害に対する感受性を低減したナビゲーションシステムのための方法および装置
ナビゲーションシステムは、GPSへのあらゆる形の干渉または電波妨害に対する著しいレベルの保護を、コスト効率のよい方法で提供する。このシステムは、GPSと組合せた地上基準局および地球低軌道(LEO)衛星のネットワークを採用する。基準局とユーザとをリンクする、GPS衛星への共通視野測距ジオメトリが、設定される。同じ対の基準局とユーザとの間のLEO衛星への第2の共通視野ジオメトリも設定される。地上局は、GPS、LEO衛星の信号の搬送波位相測定を行なうことにより、リアルタイムの支援信号を合成する。この支援情報はLEO衛星を介して、周囲の電波妨害を貫通するように高出力でユーザ受信機に送信される。ユーザ受信機は、LEO衛星の搬送波位相を追尾し、支援情報を復調して、次に、GPS信号の拡張された一貫した測定を可能にするように搬送波位相測定値および支援情報を適用する。このシステムはそれにより、電波妨害で失われたであろうGPS信号を復元させる。 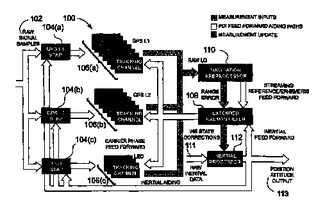 (もっと読む)
(もっと読む)
測位装置、カーナビゲーション装置及び測位方法
【課題】簡易に正確な受信機の位置を検出することが可能な「測位装置」、「カーナビゲーション装置」及び「測位方法」を提供する。
【解決手段】制御部102は、GPS受信機50によって受信される信号の送信元のGPS衛星を4個ずつ組み合わせた場合における全ての組み合わせ毎に、当該組み合わせに属する4個のGPS衛星からの信号に対応するGPS情報に基づいて、車両位置を検出し、これら組み合わせ毎に検出された車両位置に基づいて、マルチパスが発生しているGPS衛星を特定し、そのGPS衛星以外のGPS衛星からの信号に対応するGPSに基づいて、車両位置を検出する。
(もっと読む)
車両位置検出システム
【課題】本発明は、車両位置をより高精度で検出できる車両位置検出システムを提供することを課題とする。
【解決手段】自車の位置を検出することができる車両位置検出システム10において、自車に搭載され、GPS衛星からのGPS信号を受信するGPS受信部12と、自車に搭載され、交差点手前に配置される光ビーコンからの光ビーコン情報を受信する光ビーコン通信手段14と、自車に搭載され、光ビーコン通信手段14で光ビーコン情報を受信したら、この光ビーコンの情報に基づいて自車の位置を補正する中央処理装置19とを備えている。
(もっと読む)
車載用ナビゲーション装置及び車両進行方向検出方法
【課題】バック信号を取得するためのアダプタ等の特別なハードウェアを必要とせずに、バック信号を取得できない場合であっても自車の進行方向を正しく判定可能とし、自車位置精度の向上に寄与することができる「車載用ナビゲーション装置及び車両進行方向検出方法」を提供すること。
【解決手段】衛星航法及び自立航法を利用した各測位機能を併用して自車位置を決定する車載用ナビゲーション装置において、自立航法による測位機能に基づき検出した車速と、衛星航法による測位機能に基づき検出したGPS方位をモニタし、該車速がしきい値以上になったときに自車は「前進」していると判定し(S3,S4)、該車速がしきい値未満でGPS方位の変化量がしきい値以上になったときに、自車は「前進」から「後進」に、あるいはその逆の状態に切り替えられたものと判定する(S6,S7)。
(もっと読む)
位置情報取得装置、位置情報取得方法、および、端末装置用プログラム
【課題】帯域内ノイズの影響を軽減して測位解の精度改善を実現する。
【解決手段】第一の条件を満たす信号をGPS信号として捕捉・追尾する信号捕捉追尾手段と、該捕捉・追尾された追尾信号を用いて測位を行い、該移動体の位置情報を算出する位置情報算出手段と、該算出された位置情報に基づいて該移動体が所定の場所に位置するか否かを判定する移動体位置判定手段と、移動体位置判定手段により該所定の場所に位置すると判定されるときに、GPS信号を捕捉・追尾するための条件を該第一の条件と異なる第二の条件に変更する捕捉追尾条件変更手段とを具備し、信号捕捉追尾手段が、移動体位置判定手段により該所定の場所に位置すると判定されている期間中、該第二の条件に基づいて信号捕捉・追尾を行う位置情報取得装置を提供する。
(もっと読む)
車両走行動揺/騒音解析システム、車両走行動揺/騒音解析方法、車両走行騒音解析システムおよび車両走行騒音解析方法
【課題】鉄道車両の走行試験において動揺測定値および/または車内騒音測定値を高い位置精度または距離精度で正確に得ることができ、しかも計測者に負担をかけることなく、低コストで試験を行うことができる車両走行動揺/騒音解析システムを提供する。
【解決手段】軌道上を走行する車両の前後方向、左右方向および上下方向の振動加速度を検出する3軸加速度センサー11と騒音計12とGPSアンテナ13およびGPS受信機14とを車両に設置し、GPSアンテナ13によりGPS受信機14が受信する信号により取得される位置情報と3軸加速度センサー11により検出される車両の前後方向の加速度とに基づいて車両の位置情報を補正するとともに、車両が駅に停止している時に計測者により入力される駅停止信号および/または車両が構造物を通過する時に計測者により入力される構造物信号により車両の位置情報を補正する。
(もっと読む)
完全性監視付きハイブリッドINS/GNSSシステムおよび完全性監視方法
本発明は、慣性装置と衛星測位受信機とのハイブリッド化システムから得られる位置および速度情報の完全性の監視に関する。本発明は、より詳細には、閉ループにおいてハイブリッド化したINS/GNSSシステム(「慣性航法システム」および「全地球的航法衛星システム」を表す)として当業者に知られる航法装置に関する。 (もっと読む)
ナビゲーション・システムおよびナビゲーション方法
【目的】高精度を達成するためにGPS測定結果に加えて車両走行状態を利用する「ナビゲーション・システムおよびナビゲーション方法」を提供する。
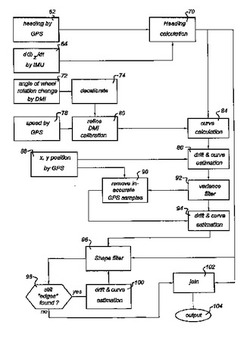
【構成】MEMS(超小型電子・機械式システム、Micro Electro Mechanical System)と呼ばれる安価で低精度の慣性センサーを使用する慣性航法システム(INS)とGPSを複合したナビゲーション・システムにおいて、(1)慣性センサーから得られる加速度と角速度を用いて予め複数の車両走行状態を定義し、(2)INSに搭載された慣性センサーから車両の各座標軸における加速度と角速度を受信し、(3)該加速度と角速度を評価することで車両の現在の走行状態を判別し、(4)判別された車両走行状態に応じた値を求め、該値を測定値としてINSとGPSを複合するカルマン・フィルタに送り、(5)車両走行状態を考慮してカルマン・フィルタ処理を行って車両の位置、速度及び姿勢の最適な推定値を得る。
(もっと読む)
車両の精確な測位システム
【課題】車両の高速走行時において全地球測位システムの出力する車両座標が時間間隔が大き過ぎることにより生じる極大誤差の問題を解決、また、測位衛星信号が受信不能である時に生じる位置誤差問題を解決することを特徴とする車両の精確な測位システムの提供。
【解決手段】本発明は車両の精確な測位システム及びその方法に関するもので、車両上に取付けて使用するものであり、それは、全地球測位システム11、ジャイロスコープ21、車両速度測定装置22、制御器3により構成される。全地球測位システム11が次の全地球測位座標を出力すると、制御器3は車両のジャイロスコープ21及び車両速度測定装置22に基づいて次の参考位置座標を算出、並びに、制御器3は次の全地球測位座標と次の参考位置座標の二点間距離dを算出、続いてそれらを比較し二点間距離dが特定距離rを超えた場合、制御器3は次の全地球測位座標を次の精確位置座標として指定し出力する。逆の場合、制御器3は次の参考位置座標を次の精確位置座標として指定し出力する。
(もっと読む)
ナビゲーション装置、ナビゲーション制御方法及びナビゲーション制御プログラム
【課題】本発明は、衛星からの信号を受信できないときであっても、信頼性の高い高精度な移動体の現在位置を提示できるようにする。
【解決手段】本発明は、衛星からの信号を受信していたときに予め学習しておいた加速度センサの移動体に対する取付角度の学習程度が高ければ、その学習結果を用いた推定した自律速度の信頼性が高いと考え、その自律速度をナビゲーション動作に用い、学習程度が低ければ自律速度の信頼性が低いと考え、その自律速度を用いるのではなく、衛星からの受信情報に基づいて算出された移動体の走行速度をナビゲーション動作に用いるように切り換えることができるので、ナビゲーション動作の信頼性を一段と向上させることができる。
(もっと読む)
測位方法及び装置
【課題】本発明の目的は、電波航法において加減速や方向転換するなどの移動局に動きの変化があったり、基準局から移動局への補正情報や観測データの送信遅延があったとしても、移動体の現時刻の位置を高精度に測位することを可能にすることである。
【解決手段】測位情報を発信する衛星の信号から、衛星の軌道情報、現時刻の搬送波位相を検出し、位置が既知である基準局で観測時刻に観測された搬送波位相と、衛星の軌道情報に基づき算出した観測時刻と現時刻における衛星の位置、観測時刻における基準局での搬送波位相をもとに、現時刻における基準局での一重位相差または現時刻における基準局での受信機クロック誤差及び搬送波位相を予測し、移動局の搬送波位相、予測された基準局の一重位相差あるいは搬送波位相及び衛星位置をもとに、移動局の位置を算出する。
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
所在及び在庫追跡のための過去エラー自動補正
【解決手段】貨物船上又はコンテナ置場内に保管されているコンテナの所在を追跡し、在庫を維持するためのシステムが提供されている。システムは、GPSやINSセンサの様なリアルタイム位置情報を入手するための1つ又は複数のセンサ、並びに、リアルタイム位置信号が遮断され又は信号に歪が生じた場合などに失われたデータを回復させると共に間違いのあるデータを補正するための事後処理を自動的に提供することができるように構成されたプロセッサを含んでおり、事後処理は、軌道を推定し、所在エラーを補正することによって行われる。事後処理測位技法は、記憶されている位置データに継続的に適用され、較正された位置の所在を反復的に求めて、較正された第2軌道区間をリアルタイムで提供する。次いで、較正された第2軌道を使用して、それが統計学的に信頼できるものになった時点で、過去のリアルタイム位置データ内のエラーが識別される。データベースに記憶されている在庫所在に自動的に補正が加えられ、コンテナについての位置エラーが補正される。 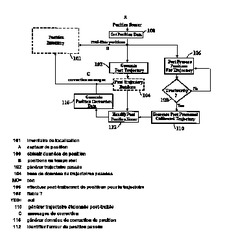 (もっと読む)
(もっと読む)
ナビゲーション装置、ナビゲーション情報算出方法及びナビゲーション情報算出プログラム
【課題】本発明は、車両に対する加速度センサの取付角度を高精度に予め算出し得、衛星からの信号を受信できないときでも、車両の速度及び現在位置を高精度に算出できるようにする。
【解決手段】本発明は、車両の速度に応じて進行方向加速度αxを算出し、車両の速度及び方位に応じて横方向加速度αyを算出し、車両の運動化速度α及び重力加速度gを観測し、気圧値PRに応じて算出した路面の高度差ΔHと車両の速度Vに応じた進行距離Lmとに基づいて路面の進行方向に対する傾斜角度θを算出し、進行方向加速度αx、横方向加速度αy、実際の進行方向加速度及び横方向加速度の観測値AD、傾斜角度θにより表される多次元の関数式fx、fy、fzに基づいて、加速度センサ5の車両に対する取付角度を求める。
(もっと読む)
走行位置検知装置
【課題】移動体の接地位置を高精度に検知する。
【解決手段】走行位置検知装置10は、GPS電波受信アンテナ11により受信したGPSデータに基づいて装置本体の位置を示す「GPS位置データ」を一定時間毎に算出するGPS位置測位処理部12と、装置本体の路面に対する傾斜データを検出するための傾斜センサ15と、“前回のGPS位置データ”が算出されてから“新たなGPS位置データ”が算出されるまでの間、前回の位置データからの移動距離を求めて装置本体の位置を示す「自律位置データ」を一定時間毎に算出する自律位置測位処理部17と、位置データに対して路面の傾きを補正して、移動体5の接地位置データを算出する接地位置算出部18とを備える。
(もっと読む)
361 - 380 / 523
[ Back to top ]