
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
381 - 400 / 523
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
位置を推定する方法及び関連する装置
方法は、慣性位置情報、GPS情報、及び測距情報を、位置推定装置を使って受け取ることを含む。この方法は、慣性位置情報、GPS情報、及び測距情報の組み合わせに基づいて、位置推定装置の位置の推定を判断する。 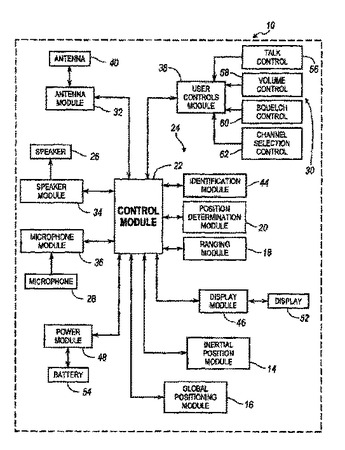 (もっと読む)
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム

【課題】従来技術に比較して正確にマルチパス判定処理を行い、高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マルチパス判定楕円算出器23と、位置及び速度算出器22とを備える。マルチパス判定楕円算出器23は、現在位置とナビゲーション装置10の進行方向とに基づいてマルチパス判定楕円を算出する。位置及び速度算出器22は、受信無線信号のGPS衛星からナビゲーション装置までの伝搬距離とマルチパス判定楕円とに基づいて、受信無線信号がマルチパス合成信号であるか否かを判定するマルチパス判定処理を実行し、マルチパス合成信号でないと判定されたGPS衛星からの受信信号に基づいて自車位置を算出する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マルチパス波の影響を低減するとともに、各送信局の配置の偏りによる測位計算の精度の低下を低減し、従来技術に比較して高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マスク処理部23と、位置及び速度算出器22と、マッチング部35とを備える。マスク処理部23は、受信無線信号に基づいて、ナビゲーション装置10の進行方向に対する各GPS衛星の相対方位と、各GPS衛星の仰角とを算出し、算出された相対方位及び仰角に基づいて当該各GPS衛星を測位算出に使用しないようにマスクする。位置及び速度算出器22は、マスクされない各GPS衛星から受信した無線信号に基づいて自車位置を算出する。マッチング部35は、所定の地図データと、速度ベクトル算出器33により算出された速度ベクトルと、位置及び速度算出器22により算出された自車位置とに基づいて現在位置を特定する。
(もっと読む)
方位補正装置、方位補正方法、方位補正プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】方位誤差の蓄積を防ぐとともに、方位補正の最適化を図ること。
【解決手段】検知部301は、移動体が直進していることを検知し、検出部302は、検知部301によって直進を検知した場合、移動体の移動方向に関する移動方位を検出する。また、算出部303は、検知部301によって直進を検知した場合、移動体の周辺道路の敷設方向に関する道路方位を算出する。そして、比較部304は、検出部302によって検出された移動方位と、算出部303によって算出された道路方位とを比較して、補正部307は、比較部304によって比較された結果に基づいて、移動方位を補正する。
(もっと読む)
電子機器及び電子機器の時刻修正方法
【課題】消費電力が高くならず、且つ、高精度な時刻修正が可能な電子機器等を提供すること。
【解決手段】地球を周回する位置情報衛星等を捕捉して、前記位置情報衛星からの信号を受信する受信部であるGPS装置23と、前記GPS装置23が受信した衛星信号に基づいて時刻修正情報を生成し、前記時刻修正情報に基づき表示時刻情報を修正して表示する時刻表示部と、を有する電子機器であるGPS付き腕時計10であって、前記GPS装置23は、前記GPS付き腕時計10の環境を判断する屋内外判断部としてソーラパネル式充電装置24と加速度センサ出力波形生成装置29を備え、前記屋内外判断部に基づいて、屋外と判断された場合に前記位置情報衛星等を捕捉する構成となっている。
(もっと読む)
測位装置及び初期化方法
【課題】移動局の動きによらず、慣性航法機器の初期化を可能にする。
【解決手段】回転レバー,移動レバーの状態により、初期化方法を選択する測位装置として、直行する3軸の角速度と加速度を出力する慣性センサ手段と、測位情報の信号により位置及び速度を出力する受信手段と、クローラを稼動させる移動レバーがオフで、クローラの上にある筐体を回転させる回転レバーがオンである場合、受信手段からの出力位置をもとに筐体の位置,方位及び姿勢を計算し、移動レバーがオンである場合、受信手段の出力位置及び速度,慣性センサ手段の出力角速度及び加速度をもとに出力角速度及び加速度のドリフト量と、位置,速度,方位及び姿勢の誤差量を計算し、ドリフト量及び誤差量だけ補正して、筐体の位置,方位及び姿勢を計算する演算手段を備える。
(もっと読む)
位置検出装置及び位置検出方法
【課題】サイクルスリップ等が発生した場合に対して、整数値バイアスの確定処理を一からやり直す必要を無くすこと。
【解決手段】本発明による位置検出装置は、移動局が所定周期毎に観測する衛星信号の搬送波位相の積算値に含まれる整数値バイアスを推定して移動局の位置を検出する位置検出装置であって、整数値バイアスの推定に用いる共分散行列を、前回周期で導出した各衛星に係る共分散を用いて更新し、今回周期で新たな衛星が観測可能となった場合、前記共分散行列に、該新たな衛星に係る共分散として所定の初期値を追加することを特徴とする。
(もっと読む)
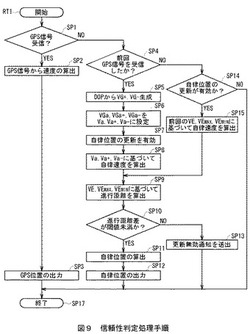
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マッチング処理及びセンサ補正の各要求精度を満たし、従来技術に比較して高い精度で車両の現在位置を測定する。
【解決手段】ナビゲーション装置10は、信頼性判定器13と、位置計算器16と、速度計算器15と、センサ部2と、マッチング部4とを備える。信頼性判定器13は、複数のGPS衛星からの各受信無線信号が基準レベルVref1よりも高いとき、当該受信無線信号が位置計算に使用可能と判定し、各受信無線信号が基準レベルVref2よりも高いとき、当該受信無線信号が速度計算に使用可能と判定する。位置計算器16は、位置計算に使用可能と判定された受信無線信号を用いて位置を算出し、速度計算器15は、速度計算に使用可能と判定された受信無線信号を用いて速度を算出する。マッチング部4は、所定の地図データと、センサ部2により算出された速度ベクトルと、位置計算器16により算出された位置とに基づいて、現在位置を算出する。
(もっと読む)
全視野のコヒーレントなGPS信号擬似ランダム雑音(PRN)コード捕捉及びナビゲーション解決定のための全地球測位システム(GPS)ユーザ受信機および幾何学的表面処理
GPS装置のより強固な検出、捕捉、位置決め解能力を可能にする方法およびシステムである。システムおよび方法はGPSユーザ受信機の位置を予測するために、一度に一つのGPS信号の捕捉ではなく、同時的な全視野のコヒーレントなPRNコード信号処理方式に基づいたGPS衛星距離信号を使用する。さらに、画像処理技術、超密着結合処理技術、またはその組合せはさらにユーザ受信機の位置決定の正確性を強化するために使用される。信号処理技術はGPS衛星距離信号が個別に検出されることができないとき、或いは1または2のみの強いGPS衛星距離信号が弱い信号環境、混雑状態、その組合せにおいて個別に検出されることができるときGPSユーザ受信機の位置を決定するために使用される。 (もっと読む)
ナビゲーション装置
【課題】 受信不可エリアにおいてはGPS受信部に対して電源の供給を遮断することで消費電力の削減を可能とするナビゲーション装置を提供する。
【解決手段】 GPS衛星からの電波を受信するGPS受信部と、該GPS受信部へ電源を供給又は遮断する電源切替部と、GPS衛星からの電波が受信できる道路か否かの情報を有する地図データを記憶した地図記憶部と、該地図記憶部に記憶された地図データに基づき出発地から目的地までの経路を探索し、前記GPS受信部の出力に基づき現在位置を算出し、現在位置の前記経路前方にGPS衛星からの電波が受信できない道路があるか否かを検出し、GPS衛星からの電波が受信できない道路がある場合は所定時間前記電源切替部に前記GPS受信部への電源供給を遮断させる制御部と、を備えたことを特徴とする。
(もっと読む)
測位装置、ナビゲーションシステム
【課題】GPS衛星が捕捉困難な状態であっても、従来の地図データを使用して、精度よく測位することができる測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段81により移動体の位置を検出する測位装置9において、移動体の挙動情報を検出する第1及び第2の自律センサ2、4、3と、測位結果に第1の自律センサによる検出情報を累積して推定位置及び推定方向を検出する位置検出手段82と、推定位置に基づき地図データ記憶手段5を参照し対応するリンクから所定距離の地図データ推定位置を検出する地図データ測位手段83と、測位結果に第2の自律センサによる検出情報を累積して累積推定方向を検出する方向検出手段84と、推定位置及び地図データ推定位置並びに推定方向及び累積推定方向をカルマンフィルタに適用して移動体の位置を推定する最尤位置推定手段85と、を有することを特徴とする。
(もっと読む)
ナビゲーション装置、位置検出方法
【課題】慣性航法による測位について精度よく誤差の評価が可能なナビゲーション装置を提供すること。
【解決手段】移動体の位置を検出するナビゲーション装置1において、移動体の挙動情報を検出する自律センサ12,13と、自律センサによる検出情報を累積して移動体の慣性測位位置を検出する慣性測位手段10aと、時刻tの、慣性測位位置の誤差分散、自律センサのセンサ誤差分散及び計算誤差を、移動体の移動モデルに基づく更新式に適用して、時刻t+1の前記誤差分散を漸化的に算出する誤差分散算出手段10bと、を有することを特徴とする。
(もっと読む)
車載用ハードディスク装置
【課題】高度の高い位置においても、ハードディスクの表面と磁気ヘッドとの間の適切な隙間を確保し、ハードディスクへのアクセスを制限することなく済ませる。
【解決手段】筐体15のトップカバー15bに、筐体15の内部と外部との圧力差を解消するための呼吸穴22を設けると共に、その内側に、防塵・防湿用のフィルタ部材23を設ける。呼吸穴22の内側のフィルタ部材23が存在しない空洞部23aにダイアフラム部材24を設ける。ダイアフラム部材24は、通常時には下方に凸となるような湾曲形状となり、呼吸穴22を開放している。外部の気圧が一定以下(例えば0.7気圧以下)に低下すると、ダイアフラム部材24は、上方に凸となるように弾性的にたわみ変形し、呼吸穴22を塞ぐ。外部の気圧が元に戻ると、ダイアフラム部材24は元の状態に戻る。
(もっと読む)
自車位置決定装置
【課題】自律航法では誤差が大きく、GPSデータが信頼できるときには、素早くGPSデータを利用して正確な自車位置を得ることができる「自車位置決定装置」とする。
【解決手段】GPS受信信号により自車両の位置と進行角を検出するGPS位置進行角検出部と、ジャイロと車速データにより自車両の位置と進行方位を検出する自律航法位置方位検出部と、GPS位置進行角検出部と自律航法位置方位検出部により自車両の位置と進行方位を決定する自車位置方位決定部と、自車位置方位決定部で決定した自車両の位置を地図の道路に一致させるマップマッチング部と、GPS位置進行角検出部で検出したデータの信頼性を判定するGPS信頼度判定部とを備え、自車位置方位決定部では、マップマッチング処理が行われないとき、GPS信頼度判定部でGPSデータに信頼性があると判定したときには、GPS位置と進行角により自車両の位置と進行方位を決定する。
(もっと読む)
測位装置
【課題】自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供すること。
【解決手段】地図データを記憶した地図データ記憶手段5と、移動体の挙動情報を検出する自律センサ2、3)と、GPS等の電波航法測位手段による測位結果に自律センサによる検出情報を累積して移動体の推定位置を検出する慣性測位手段82と、道路周辺の地物を検出する地物検出手段84と、地物の位置を同定する地物位置同定手段83と、地物の位置を基準に移動体の地物推定位置を推定する地物基準測位手段85と、推定位置及び地物推定位置をカルマンフィルタに適用して移動体の位置を推定する位置推定手段86と、を有することを特徴とする測位装置9を提供する。
(もっと読む)
測位装置、ナビゲーションシステム
【課題】より精度よく測位した位置を補正し、マップマッチングした場合でも非連続な走行軌跡となることが低減される測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段1により移動体の位置を検出する測位装置10において、移動体の挙動情報を検出する自律センサ2、3と、電波航法測位手段1による測位位置に自律センサ2,2による検出情報を累積して自律航法測位位置を検出する位置検出手段と、を有し、位置検出手段は、測位位置又は自律航法測位位置のいずれか、及び、過去の自律航法測位位置の履歴に基づき予測した予測位置に基づき、移動体の位置を推定することを特徴とする。
(もっと読む)
位置検出装置及び位置検出用プログラム
【課題】車両の位置検出システムとしての冗長性(対故障性)を向上させつつ、より正確な位置検出が可能な位置検出装置及び当該位置検出用のプログラムを提供する。
【解決手段】一つの車両の位置を示す位置情報を、相互に異なる位置検出条件の下で夫々生成する二つのGPSセンサ11及び12と、各GPSセンサ11及び12により生成された各位置情報夫々における位置検出精度につき、当該位置検出精度が高い方の位置情報を用いて車両の位置を算出する位置検出部2と、を備える。
(もっと読む)
位置情報提供システムおよび移動通信装置
【課題】 位置検知手段をもたない携帯通信端末などに現在位置情報を提供する。
【解決手段】 自律的に現在位置を取得する第1の移動通信装置は、自律的に現在位置を取得できない第2の移動通信装置との間で無線通信を行う無線通信手段と、第2の移動通信装置と交信し、送受信パワーまたは信号伝送時間を計測して第2の移動通信装置との間を距離を算出する測距手段と、現在位置と測距手段が取得した第1の移動通信装置と第2の移動通信装置との間を距離から、第2の移動通信装置の現在位置を算出し、当該現在位置を含むデータを無線通信手段から第2の移動通信装置に送信する制御を行う制御手段とを備える。第2の移動通信装置は、第1の移動通信装置との間で無線通信を行う無線通信手段と、第1の移動通信装置から送信されたデータを無線通信手段で受信し、該データから第2の移動通信装置の現在位置を取得する制御を行う制御手段とを備える。
(もっと読む)
車両位置測位装置及び車両位置測位方法
【課題】 軌道上を走る車両において通常の衛星測位を実施すると、軌道位置の考慮がされないため、軌道を外れた位置に測位結果が算出されることがある。
【解決手段】 GPS衛星から観測データを受信するGPS受信機と、前記車両の車両速度を検出する車速検出器と、前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースと、前記観測データと、前記車両速度と、前記線路データベースの中から抽出した自らの位置に最も近い前記位置座標に対応した前記軌道方向とを入力し、前記車両速度と前記軌道方向とを用いた慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補完して前記車両の位置を演算する演算部とを備えたようにした。
(もっと読む)
381 - 400 / 523
[ Back to top ]