
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
461 - 480 / 523
車両の走行制御装置

【課題】 基準局の異常を的確に検出し、精度のよい走行制御を実現することができる車両の走行制御装置を提供する。
【解決手段】 制御装置18は、基準局4からの情報とGPS衛星3からの情報に基づいて測位した自車位置から自車両1の走行情報(第1の走行情報)を演算し、この第1の走行情報が実車の走行状態から求まる走行情報(第2の走行情報)に対して予め設定した閾値以上異なるとき、基準局4が移動することによる該基準局4の異常を判定することにより、基準局4の異常を的確に検出する。そして、制御装置18は、異常判定時に、自車位置に基づく走行制御の実行をキャンセルすることにより精度のよい走行制御を実現する。
(もっと読む)
車両走行速度測定方法及びその装置

【課題】車両走行時のタイヤの回転に伴って生ずる加速度を検出して車両の走行速度を測定する車両走行速度測定方法及びその装置を提供する。
【解決手段】タイヤ300の回転に伴って回転軸に直交する方向に発生する加速度を検知する加速度センサを備えたセンサユニット100をタイヤ300を含む回転機構部に設け、検出した加速度αと、回転軸から加速度センサまでの距離rとタイヤの半径Rとを式(v1=R×(α/r)1/2)に代入して走行速度v1を算出すると共に、加速度αの検出結果に重畳している重力加速度によるサイン波の周期tを検出し、半径Rと周期tとを式(v2=2πR/t)に代入して走行速度v2を算出し、走行速度v2を基準とした走行速度v1に対する補正係数β1(=v2/v1)を式[β1=2π/{t×(α/r)1/2}]に代入して算出し、走行速度v1に補正係数β1を乗算した値を算出して測定結果とする。
(もっと読む)
GPS衛星用基準局システム
【課題】 高高度移動体の位置決定に影響する周囲環境等の排除を図る。
【解決手段】 3つのレーザ測距基地局16a等からGPS衛星用基準局12の再帰反射体14に向けて測距用レーザを放射し、その測距用レーザの再帰反射により各レーザ測距基地局16a等に到達した測距用レーザを検出してレーザ測距基地局毎のレーザ測距基地局16a等と再帰反射体14との間の距離を算出し、これら3つの距離に基づいて再帰反射体14の位置を決定し、そしてこの位置と、再帰反射体14とGPS受信アンテナ20との相対的な位置と、姿勢センサ22の姿勢情報とに基づいてGPS受信アンテナ20の位置を決定する。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】実測値にしたがった現在位置算出の迅速化を図ること。
【解決手段】現在位置算出装置は、移動体の移動状態に応じて変動する検出信号を検出する検出部201と、検出部201によって検出された検出信号のデジタル変換を行う変換部202と、移動体の測位情報を取得する取得部203と、取得部203によって測位情報を取得した時刻を測位時刻情報として変換部202に出力する出力部204と、変換部202を介して出力された測位時刻情報に基づいて、取得部203によって取得された測位情報および変換部202によってデジタル変換された検出信号との同期を取る同期部205と、同期部205によって同期が取られた測位情報および検出信号に基づいて、移動体の現在位置を算出する位置算出部206と、を備えることを特徴とする。
(もっと読む)
ナビゲーションシステム、その制御方法及び制御プログラム
【課題】ナビゲーションの技術において、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、GPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測すること。
【解決手段】累積部11は、車両の加速度又は加速度に対応する値を加速度値として取得し、その累積値を算出する。車速算出部12は、GPSで得る位置の変化量に基き車速を算出し、記録部13は、同じ時点における前記累積値と前記車速との各組を対応付けて対照データDとして記憶メディア部5に記録する。推定処理部14は、前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、対照データDを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する。
(もっと読む)
走行支援装置
【課題】 車両位置の測位精度を向上させることができる走行支援技術を提供する。
【解決手段】 走行支援装置10は、車両800の進行方向および走行速度に基づく車両800の位置である自律位置を測位する自律測位部112と、道路上において天球CSが地物PFによって遮られる態様を示す天球情報Dspを含む道路地図情報Irmを記憶する記憶部120と、GPS信号を送信する複数のGPS衛星910の中から幾つかを天球情報Dspに基づいて選択する衛星選択部114と、選択されたGPS衛星910から送信されるGPS信号に基づく車両800の位置である他律位置を測位する他律測位部116と、測位された他律位置を用いて、自律位置に生じる累積誤差を補正する誤差補正部118とを備える。
(もっと読む)
測位装置
【課題】 利用者に大きな負担をかけず、測位できる地域を狭くすることなく、反射波による影響を低減することができる測位装置を提供する。
【解決手段】 車両から出力される車速パルス等に基づいて移動速度を算出する速度算出部5と、複数の衛星によって送信された衛星信号の信号レベルと閾値とを比較することによって衛星信号を選択する衛星信号選択部6と、選択された衛星信号に基づいて測位装置の位置を算出する位置算出部7とを備え、衛星信号選択部6は、速度算出部5によって算出された移動速度に応じて閾値を変更する。
(もっと読む)
GPS受信装置およびGPS受信装置における誤差円半径の設定方法
【課題】 GPSによる測位誤差を正確に反映した誤差円半径を設定できる「GPS受信装置およびGPS受信装置における誤差円半径の設定方法」を提供する。
【解決手段】 誤差円半径の設定方法は、2次元測位時に、3次元測位時の高度情報、垂直方向の測位位置精度情報、および速度情報を利用して高度誤差を予測するステップと、予測された高度誤差に基づき2次元測位時の測位誤差を示す誤差円半径を設定するステップと、2次元測位または3次元測位の測位結果に基づき移動特性を算出するステップと、算出された移動特性に基づき設定された誤差円半径を修正するステップとを有する。
(もっと読む)
GPSレシーバにおけるサーチ周波数の設定方法、GPSレシーバ、及び、車載器
【課題】 TTFFを効率良く短くさせることができる。
【解決手段】 GPS信号を第一のレンジでサーチし、第一のレンジによるサーチを所定回数実行してもGPS信号を捕捉できない場合に第一のレンジよりも広い第二のレンジでGPS信号をサーチし、これを繰り返して段階的にサーチレンジを広げていくサーチステップを含んだ、測位に必要な複数のGPS信号を捕捉する方法であって、GPS信号を捕捉できる状態に移行したか否かを判定する判定ステップと、GPS信号を捕捉できる状態に移行したと判定したときに、サーチステップを、終了させて最初から開始する開始ステップとを含んだ方法を採用する。
(もっと読む)
路面電車位置検知装置
【課題】停留所における路面電車の発着を車両位置情報に基づいて的確に判定する。
【解決手段】路面電車20に搭載されて車両位置を検知する位置検知装置30において、位置情報を得るGPS受信機33と、路面電車20の速度計22から速度情報を取得し運転方向切換スイッチ23から運転方向を取得する速度情報取得装置35と、停留所の地上基地局装置に適合した無線機36と、路線マップデータを用いて位置情報を路線上に変換するマップマッチング手段と速度情報や運転方向に基づいて位置情報の更新を選択的に行う速度反映手段と停留所マップデータを用いて位置情報から路面電車20の出発および到着を判定する発着判定手段とを有した車上処理装置34とを備える。
(もっと読む)
衛星信号受信システム
【課題】雑音が白色雑音の仮定を成立させないような場合でも、移動体の加速度の変化によらず、常に高い精度の位置情報を算出することができる衛星信号受信システムを提供すること。
【解決手段】測位演算装置により出力される位置情報から、変位特性検出装置によって変位量に関する情報の検出を行う。その変位量に関する情報から、屈折点検出装置によって、変位量の屈折点のタイミングの算出を行う。その変位量に関する情報、変位量の屈折点のタイミング情報を利用し、測位演算装置より出力される位置情報に含まれている誤差の抑圧を行う。
(もっと読む)
測位装置
【課題】 追尾している衛星から送信された衛星信号の受信が途絶えた状態から衛星を再捕捉する際に、反射波だけで衛星を再捕捉してしまうことを防止することができる測位装置を提供する。
【解決手段】 衛星によってC/Aコードでスペクトル拡散されて送信された衛星信号に基づいて測位する測位装置1において、C/Aコードを発生するC/Aコード発生器12と、スペクトル拡散された衛星信号とC/Aコード発生器12によって発生されたC/Aコードとの相関値を算出するための積分器14と、衛星信号をスペクトル拡散したC/Aコードの位相を検出するタイミング制御部13とを備え、タイミング制御部13は、相関値が閾値未満となった場合には、C/Aコードの位相を予測し、C/Aコード発生器12によって発生されたC/Aコードを構成するビットが次のビットに代わるタイミングから一定時間以内に積分器14が積分を制限するように制御する。
(もっと読む)
ナビゲーション・システム
ナビゲーション・システムは現在位置を推測しない第1動作状態と現在位置を指定する第2動作状態を有する第1ナビゲーション・モジュールを含む。第1ナビゲーション・モジュールの第1動作状態に応答して第2ナビゲーション・モジュールが推測航法を行う。 (もっと読む)
移動体用航法装置
【課題】 移動体の高度を安価な構成で且つ精度良く検出する移動体用航法装置を得る。
【解決手段】 気圧高度計5では、気圧を計測し、その計測される気圧に応じて移動体の高度を検出する。気圧高度計校正装置6では、気圧高度計5により検出される移動体の高度を、GPS測位装置1により検出される移動体の高度を基準として校正し、複合航法計算装置7では、GPS測位装置1による測位不可時に気圧高度計校正装置6により校正された移動体の高度を利用して移動体の位置速度を計算するようにしたので、GPS測位装置1による測位が不可能になっても、移動体の高度を安価な構成で且つ精度良く検出することができる。
(もっと読む)
無人搬送車の誘導装置
【課題】 走行路の誘導標識体を不要として走行路の工事費用を縮小すると共に、車輌コストを低減することができる無人搬送車の誘導装置を提供すること。
【解決手段】 屋外の見晴らしの良い走行路では、GPS信号および第1カルマンフィルタ13に基づいて、慣性航法演算部11で算出された無人搬送車1の位置及び方位(N,E,θ)の誤差を補正し、一方、屋内あるいは遮蔽物などによりGPS信号が切れた場合には、レーザレーダ10および第2カルマンフィルタ15により、無人搬送車1の位置及び方位(N,E,θ)の誤差を補正する。これにより、屋外および屋内を問わず如何なる場所においても、走行路に誘導標識体を必要とせずに、精度良く無人搬送車1を誘導することができる。
(もっと読む)
乱気流を遠隔的に測定するシステム
乱気流を検知するシステム及び方法は、数台の移動プラットフォームと、移動プラットフォーム速度センサと、数台の電磁エネルギー送信器及び受信器とを含む。受信器は、送信器によって送信されたエネルギーを、乱気流を被る経路沿いに進んだ後に、受信する。受信器は、乱気流によって生じるエネルギーの変化を検知し、(送信器または受信器のいずれかが配置された)移動プラットフォームの速度の効果を変化から選別する。加えてシステムは、の3次元モデルを作成できる。別の実施形態において、本発明は移動プラットフォームを使って乱気流を検知する方法を提供する。方法は、乱気流を被る経路に沿って進んだ電磁エネルギーを受信することと、乱気流によって生じたエネルギーの変化を判定することとを含む。好ましくは受信器が配置される移動プラットフォームの速度の効果は変化から選別される。  (もっと読む)
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
建設機械の出来形情報処理装置
【課題】 出来形に関する情報を従来の技術よりも正確に取得することができる建設機械の出来形情報処理装置を提供する。
【解決手段】 バケット7に予め設定したモニタポイントに係る三次元位置の計測結果に基づいて、フロント作業機4により掘削して形成された地形に関する情報を取得するようにした油圧ショベルの出来形情報処理装置において、油圧ショベル1が発する信号に基づいて、フロント作業機4の作業状態が掘削作業の状態にあるか否を判定する作業状態の判定手段を設け、フロント作業機4の作業状態が掘削作業の状態にあると前記判定手段で判定されたときに、前記モニタポイントに係る三次元位置の計測結果に基づいて前記地形に関する情報を取得するように構成した。
(もっと読む)
一体型GPS慣性システム
GPS受信機の新たな設置にも改良にも適したGPS慣性システムは、GPSアンテナのハウジングに組み込まれた慣性センサを含む。慣性センサの出力は、GPSシステムで使用されるのと同じデータ変調方式を使用して変調され、GPS搬送波と同じ周波数のRF周波数搬送波に載せられる。慣性測定値はアンテナからのRF信号と同じケーブルを用いて受信機に送られ、受信機は、GPS位置信号からデータを復元するのに使用されるのと同じ方式を使用して、センサ信号からデータを復元する。従って、既存のGPS受信機のソフトウェアを変更することで、慣性センサの出力から位置推定や速度推定が可能になる。 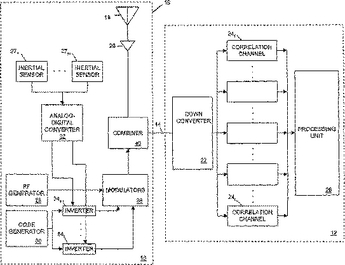 (もっと読む)
(もっと読む)
カーナビゲーションシステム
【目的】携帯通信端末の現在位置を目的地とするナビゲーション手段を有するカーナビゲーションシステムを提供する。
【構成】カーナビゲーションシステム20は、通信ネットワーク3と、管理センタ5と、GPS付の携帯通信端末4と、カーナビゲーション装置10と、から構成され、カーナビゲーション装置10及び携帯通信端末4において装置識別情報NAME又は端末識別情報H1を管理センタ5に登録し、カーナビゲーション装置10は探索時に、端末識別情報H1を入力して管理センタ5に携帯通信端末4の探索を要求し、管理センタ5は登録の有無を確認し、登録された携帯通信端末4の相手方に探索の通知を行い、探索承諾する携帯通信端末4は現在位置情報Nをカーナビゲーション装置10に送信し、カーナビゲーション装置10は携帯通信端末4の現在位置を目的地とする経路案内を行うナビゲーション手段を備える構成。
(もっと読む)
461 - 480 / 523
[ Back to top ]