
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
261 - 280 / 523
車載装置
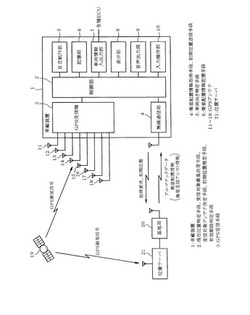
【課題】周囲環境の変化に影響されることなく、マルチパスの影響を回避した測位を行えるようにする。
【解決手段】車載装置1は、位置サーバ21から受信したアルマナックデータに基づいて複数のGPS衛星19のうち幾つかを受信対象のGPS衛星として決定し、その受信対象として決定した幾つかのGPS衛星19毎に当該GPS衛星19の配置態様と車両の向きと基づいて複数のGPSアンテナ11〜18のうちから受信対象のGPSアンテナを決定し、その受信対象として決定した幾つかのGPS衛星19毎に受信対象として決定したGPSアンテナから入力したGPS衛星信号を合成して当該GPS衛星信号を送信したGPS衛星19との間の疑似距離を算出する。
(もっと読む)
衛星航法/推測航法統合測位装置

【課題】慣性航法を行っているときでも、外部センサの検出値の補正が適正であるか否かを判定できるようにして、著しく劣化した測位結果が出力されるのを防止する。
【解決手段】航法装置100は、GPS受信機11、移動体の前後方向であるX軸方向と、移動体の左右方向であるY軸方向の少なくとも2軸の加速度を検出する加速度センサ12と、X軸方向及びY軸方向に対してそれぞれ直交するZ軸回りの方位方向の角速度を検出する少なくとも1軸の角速度センサ13を含み、CPU等からなる統合演算部30のセンサ検出値の適正補正判定部22は、X軸方向の加速度検出値を積分した値(速度)と、方位方向の角速度検出値の積とを求め、この値とY軸方向の加速度検出値との誤差を求め、この誤差が所定のしきい値を超えるか否かを判定することによって加速度センサおよび角速度センサの補正が適切であるか否かを判定する。
(もっと読む)
変換係数の導出方法およびナビゲーション装置
【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
変換係数の導出方法およびナビゲーション装置
【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
ナビゲーション装置
【目的】結線ミス等によって正常な信号が得られない可能性がある車速センサ情報が供給されない場合や、もともと車速パルス信号が取得できない車種であっても、測位精度の低下を防止し、また、無用の処理による消費電流の増加を防止したナビゲーション装置を提供する。
【構成】ナビゲーション装置に、位置情報演算処理において車速センサ情報を使用するか否かを設定する車速センサ入力設定手段を備え、車速センサ情報を使用しない旨が設定された場合、GPS受信手段の情報と前記ジャイロセンサの情報とに基づいて位置情報を演算する。
(もっと読む)
移動体位置算出装置および移動体位置算出装置用のプログラム
【課題】従来よりも簡易なハードウェア構成で、衛星航法による現在位置の算出精度を向上させる。
【解決手段】ナビゲーション装置は、推測航法によってGPS衛星からの受信タイミングにおける推定位置を算出し(ステップ110)、その受信タイミングにおいて複数のGPS衛星から受信した信号に基づく擬似距離データ(ステップ120)を使用して、自車両の現在位置を特定する(ステップ170)。ただし、地図データ中の構造物の立体形状データに基づいて、障害物に遮られるGPS衛星、および、反射波が車両2に到達してしまうGPS衛星を特定する(ステップ140、150、160)。そして、前者のGPS衛星からの信号は現在位置の測定のための利用対象から除外する(ステップ155)。また、後者のGPS衛星についての重みを、他の利用対象のGPS衛星についての重みよりも小さい値にする(ステップ165)。
(もっと読む)
車両位置姿勢推測装置
【課題】最終的な計算精度を高めることができる車両位置姿勢推測装置を提供すること。
【解決手段】本発明による車両位置姿勢推測装置1は、車両の加速度を検出する車両挙動検出手段2cと、車両の車輪の車輪速を検出する車輪速検出手段2dと、GPS速度を検出するGPS速度検出手段2eと、車輪のスリップ又はロックが発生しているか否かを判定する判定手段2fと、判定手段2fが車輪のスリップ又はロックが発生していないと判定する場合に、加速度と車輪速に基づいて、車速を計算する計算手段2gを備えるとともに、判定手段2fが車輪のスリップ又はロックが発生していると判定する場合に、計算手段2gが、加速度とGPS速度に基づいて車速を計算することを特徴とする。
(もっと読む)
GPS受信機
【課題】高速移動中でも、地図画面をスムーズに更新することのできる携帯型のGPS受信機を提供すること。
【解決手段】GPS受信機は、現在の所在地と過去の所在地とに基づき、次フレームの所在地を推定し(S108)、次フレームの所在地と現在の所在地とに基づき、更新データ量を推定する(S110)。更新データ量が所定値を超えていると判断した場合に(S112でNO)、現在の所在地の表示位置が画面の端部になるように、地図サーバより地図データをダウンロードする(S120,S124,S126)。
(もっと読む)
衛星航法/推測航法統合測位装置
【課題】低価格で構成でき且つ位置・速度等の航法データの精度を高めた衛星航法/推測航法統合測位装置を構成する。
【解決手段】追尾処理部31は、GPS測位信号に基づいて、その捕捉処理、追尾処理、航法メッセージの復調処理を行う。GPS測位演算部32は擬似距離観測量やドップラー周波数観測量及びエフェメリスデータを基に位置・速度等を演算し、これらを出力判定部43と追尾処理部31へ与える。統合測位演算部42は擬似距離観測量やドップラー周波数観測量の他に、慣性センサの出力や地図情報又は地図位置と測位との差の情報等の外部支援情報に基づいて、位置・速度などを推定し、出力判定部43へ与える。出力判定部43はGPS測位演算部32の出力と統合測位演算部42の出力とを比較し、統合測位演算部42の出力データの信頼性判定や外部支援データの異常判定を行う。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】現実的な移動体の移動を想定した適切な誤差推定を実現する測位方法等を提供す
ること。
【解決手段】慣性航法演算処理により随時求められる相対高度である第1高度変化「Δh
i」と、移動体である自動車の外気圧を検出する気圧センサの検出結果に基づいて算出さ
れる相対高度である第2高度変化「Δhb」との差「δh=Δhi−Δhb」が算出される
。そして、算出された高度変化の差「δh」、慣性航法演算処理により求められる自動車
の直進方向に対する左右方向の速度「vix」、及び、慣性航法演算処理により求められる
自動車の高度方向の速度「viz」に応じた観測値を用いたカルマンフィルタ処理が行われ
て、慣性航法演算処理の演算結果「(pi,vi,Ai)」に含まれる誤差「(δp,δv
,ε)」が推定され、推定された誤差を用いて慣性航法演算処理の演算結果が補正されて
、自動車の現在位置が測位される。
(もっと読む)
自車位置検出装置
【課題】衛星測位が不能となる駐車場退出直後に自車位置/進行方位を適正に修正する「自車位置検出装置」を提供する。
【解決手段】衛星測位可能に復帰した衛星測位で求まる自車の位置/進行方位320を、旋回中心点330から衛星測位で求まる自車の位置/進行方位320へ向かう線分上に、旋回中心点330を回転中心として回転し、第1仮自車位置/進行方位311とする。第1仮自車位置/進行方位311に整合する各リンク301、302について、リンクの向きと一致するように、旋回中心点330を回転中心として、第1仮自車位置/進行方位311を回転し、第2仮自車位置/進行方位312、313とし、第2仮自車位置/進行方位312、313とリンクとのマップマッチングを行う。そして、各リンクについてのマップマッチングによって求めた位置のうち、最も確からしい位置と当該位置が存在するリンクの向きに、自車位置/進行方位311を修正する。
(もっと読む)
車載用ナビゲーション装置
【課題】車速パルスを用いずとも正確な車速を算出することによってGPS信号の受信が不可能な地点における自車位置を高精度に算出することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】車速(GPS受信不能期間の直前におけるGPS信号に基づいて算出された第1の車速a)と、映像速度(GPS受信不能期間の開始時における車載カメラの撮影映像に基づいて算出された映像速度b)との相関関係(速度比K)が、GPS受信不能期間においても維持されるとみなした上で、速度比KにGPS受信不能期間内における映像速度b’を乗じることによって、擬似的な第1の車速として第2の車速a’を算出し、この第2の車速a’を自律航法に用いる。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を特定する特定精度の向上を計ることができる位置特定装置、位置特定装置を実現するコンピュータプログラム及び位置特定方法を提供する。
【解決手段】信号機が設置された交差点に関する交差点情報に基づいて歩行者の位置を特定する位置検出装置10であって、交差点情報を受信し、受信した交差点情報に基づいて、交差点の位置を取得する。また、信号機が青信号と赤信号とを切り替える信号切替タイミングを、受信した交差点情報に基づいて取得する。操作部16から操作を受け付けたタイミングが、取得した信号切替タイミングと合致するか否かを判定し、合致する場合、歩行者の位置を、交差点の位置と特定する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】位置推定部171は、前回に算出された推定位置又は検出位置から測位位置までの測位軌跡に沿った軌跡を求めることにより、推定位置の軌跡及び推定位置を算出する。誤差算出部172は、位置推定部171で推定した推定位置の誤差範囲を算出する。属性判定部173は、誤差算出部172で算出した推定位置の誤差範囲内に存在する地図上の領域の属性を判定する。位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。
(もっと読む)
電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法
【課題】送信機からの電波の回折度合いを推定し、推定結果に応じて車両の位置を精度良く特定することができる電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法を提供する。
【解決手段】制御部30は、周辺車両300の形状情報、位置情報を取得し、自車両の予測位置を求め、送信機200との仮想直線を特定する。制御部30は、送信機200からの電波を受信して電波測位位置を求める。制御部30は、周辺車両300の形状情報、車間距離、仮想直線などに基づいて周辺車両300による仮想遮蔽面を特定し、仮想遮蔽面と仮想直線などに基づいて電波の回折角度θを算出する。制御部30は、算出した回折角度に応じて重み付け係数を設定し、設定した重み付け係数、予想位置及び電波測位位置に基づいて、自車位置を特定する。
(もっと読む)
改善されたナビゲーション装置及び方法
比較的弱いGPS信号のみが利用可能な場合の、ナビゲーション装置(500)の位置を決定する方法と、このような状況で自身の位置を決定できるナビゲーション装置とが説明される。この方法は、複数のGPS衛星(51−54)から複数のGPS信号(502)を受信する工程と、衛星のそれぞれに特有の識別情報とともに信号の一部を構成するタイミング情報から、距離情報を決定する工程と、信号のそれぞれの一部をさらに構成する、衛星のそれぞれに特有の軌道歴データペイロードの全体を受信及び格納することを試みる工程とを含む。この方法はさらに、無線通信プロトコルを用いて、近傍の装置(508)との通信(510)を確立する工程と、近傍の装置が、特定された衛星についての衛星位置に関する軌道歴データ又は軌道歴データの特定の部分を、既に格納していることを判定する工程と、特定された衛星についての軌道歴データ又は軌道歴データの特定の部分を、要求及び受信する工程と、ナビゲーション装置が続けて、距離情報と、距離情報が決定された衛星に特有の無線で受信された軌道歴データと、を用いてナビゲーション装置の位置を決定する工程と、を含むことを特徴とする。 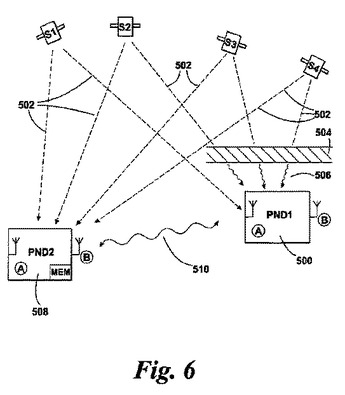 (もっと読む)
(もっと読む)
微弱なGPS/GNSS信号を使用するサブマイクロ秒時刻転送(TimeTransfer)処理
GPS/GNSS信号を使用して、GPS/GNSS受信機にサブマイクロ秒の時刻転送をする方法を提供する。デジタル化された複素ベースバンド信号および生成PNコードが各コード周期について相互相関され、生成PNコードのコード・エポックにおいて複素相関値が出力され、出力された相関値の列は航法メッセージを表すデータストリームを形成する。ビット・シンクロナイザが、ビット境界においてビット同期パルスを発生する。複数のサブフレームを検索し、複数のサブフレームの検索結果を積算することにより、航法メッセージの既知のビット位置に既知の列を有する目標セグメントの位置が検出される。目標セグメントの位置から目標セグメントの送信時刻が所定の時間的不明確さをもって決定される。外部情報源から得た近似的な時刻を使用して時間的不明確さを解決することにより正確な局所時刻が決定される。 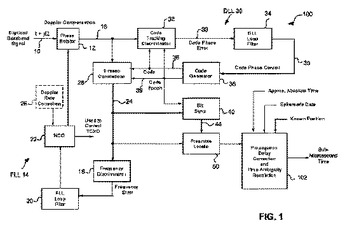 (もっと読む)
(もっと読む)
測位方法
【課題】マルチパスの誤検出および未検出を低減しマルチパスの影響を受けない高精度な位置を表示する。
【解決手段】測位衛星が発信する軌道情報および時刻情報を受信するステップ(201)と、受信した時刻情報をもとに測位衛星と受信機との間の擬似距離を算出するステップ(206,207)と、受信した軌道情報および時刻情報をもとに前記測位衛星の位置を算出するステップと、算出された擬似距離および測位衛星の衛星位置をもとに受信機の現在位置を算出するステップと、受信機の予測位置を算出するステップと、受信機の予測位置および測位衛星の衛星位置をもとに擬似距離の予測量を算出するステップと、前記擬似距離と擬似距離の予測量の差分をもとに擬似距離の予測観測誤差を算出するステップ(208)と、前記予測観測誤差を予測観測誤差の標準偏差で除算した結果をもとにマルチパスの発生の有無を判断するステップ(209,210)を備えた。
(もっと読む)
衛星測位システム使用可能なメディア測定システムおよび方法
【課題】意図された目的(メディアディスプレイ露出)のためにメディアディスプレイ位置のような種々の位置の効果を決定する監視装置を提供する。
【解決手段】監視装置200は、多数の調査応答者に分配されている。監視装置200は応答者の移動を追跡する。応答者の移動を追跡するために種々のテクノロジーが使用されることができるが、監視装置200の位置追跡の少なくともいくつかは、全地球測位システム(“GPS”)のような衛星105の位置決定システムを使用する。応答者および監視装置200のこれらの移動は、ある地点で、いくつかのメディアディスプレイ150への露出と一致する。監視装置によって収集されたジェオデータ(移動データ)は、応答者がどのメディアディスプレイ150に露出されたかを決定するダウンロードサーバ300にダウンロードされる。露出決定は事後処理サーバ400によって行われる。
(もっと読む)
測位装置
【課題】高い周波数で測位を行いつつも、そのような周期で測位を行った際に生じる測位精度の低下を抑制する。
【解決手段】GPS信号を用いて少なくとも2種類の周期でGPS測位を行うことができるように構成されたGPS測位手段と、所定の条件に基づいてGPS測位の精度が低いか否かを判定するGPS測位精度判定手段と、GPS測位の精度が低いと判定された場合には、GPS測位手段が第1の周期でGPS測位した結果に基づいて最終的な測位結果を計算し、GPS測位の精度が低くないと判定された場合には、GPS測位手段が第1の周期よりも短い第2の周期でGPS測位した結果に基づいて最終的な測位結果を計算する最終測位結果計算手段とから測位装置を構成する。
(もっと読む)
261 - 280 / 523
[ Back to top ]