
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
221 - 240 / 523
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
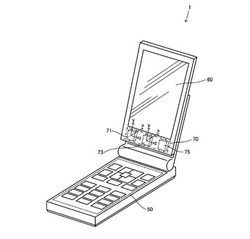
【解決手段】携帯型電話機1を保持又は搭載した移動体の移動可能性、不定及び停止可能性それぞれについて、センサ部70の加速度センサ71の検出値適合範囲を設定するとともに、移動可能性の検出値適合範囲を最も広く設定することで、移動体の停止判定用のメンバシップ関数を設定する。そして、メンバシップ関数を用いたファジィ推定演算により移動体が停止状態にあるか否かを判定し、カルマンフィルタを用いた位置算出演算を行う際の誤差パラメータである観測誤差共分散行列「R」及びシステムノイズ行列「Q」の値を、停止状態にあると判定したか否かに応じて変更する。そして、最小二乗法を用いた位置算出処理により算出した移動体の位置を、カルマンフィルタを用いた位置算出処理により補正することで、出力位置を決定する。
(もっと読む)
移動体位置測位装置

【課題】より確実且つ高精度に移動体の位置を測位すること。
【解決手段】複数の衛星からの信号を受信する受信手段と、該受信手段により受信された信号に基づき観測疑似距離を算出する観測疑似距離算出手段と、該観測疑似距離算出手段により算出された観測疑似距離に基づき、繰り返し測位演算を行なう測位演算手段と、を備える移動体位置測位装置であって、前記測位演算手段が繰り返し測位演算を行なう中で前回に測位された測位結果と衛星位置から求められる距離に、ADR(Accumulated Doppler Range)の変化量を加算して推定疑似距離を算出する推定疑似距離算出手段を備え、前記測位演算手段は、所定の場合に、前記観測疑似距離算出手段により算出された観測疑似距離に代えて前記推定疑似距離算出手段が算出した推定疑似距離を用いて測位演算を行なうことを特徴とする、移動体位置測位装置。
(もっと読む)
移動体用測位装置
【課題】高度が変化する環境下においても精度良く2次元測位を行うことができる移動体用測位装置の提供。
【解決手段】衛星からの衛星電波を移動体で受信して、該移動体の位置を測位する移動体用測位装置において、移動体の姿勢に応じて変化する座標系であって、該移動体を基準とした直交座標系を定義する座標系定義手段と、前記座標系定義手段により定義された直交座標系を用いて、3個の衛星を用いた2次元測位により前記直交座標系における移動体の位置を演算する2次元測位手段とを備えることを特徴とする。
(もっと読む)
携帯端末装置及び携帯端末装置の測位方法
【課題】測位成功率を保ちつつ低消費電力化を可能とすることのできる携帯端末装置を提供する。
【解決手段】過去の測位試行時の測位情報に基づいて測位モード判定を行う測位モード判定部20と、測位モード判定部の測位モード判定結果に基づいて測位を行うGPS測位部10とを備え、電源オンからの時間、捕捉衛星数、過去の測位位置、測位時間等の情報を使用してモード毎に電源制御部12のタイムアウト時間を決定し、精度よくGPS受信機11の電源制御を行う。
(もっと読む)
測位システムにおける磁気計の使用
モバイル局は、地磁場の測定される特性を使用しておおよその緯度を決定する。おおよその経度もまた決定されることができる。モバイル局は、決定される場合には、おおよその緯度および経度を使用し、例えば、衛星信号のサーチおよび捕捉の間に衛星測位システム(SPS)における可視衛星のリストを決定することによって、及び/または、位置計算においてシード位置としておおよその位置を使用することによって、モバイル局についてのポジション・フィックスを決定することにおいて支援する。地磁場の特性は、例えば伏角または垂直強度であってもよく、3次元磁気計と3次元加速度計からのデータを使用して決定されることができる。磁場の瞬間値は、モーションの影響および大きなメタリックマスの存在を減らすために平均化されることができる。  (もっと読む)
(もっと読む)
GPS装置およびその測位方法
【課題】インフラであるDGPS基準局やDGPS信号の受信機構を受信機に搭載していなくても、誤差要因の解消を実現させることができるGPS装置およびその測位方法を提供。
【解決手段】GPSモジュール10置は、センサ処理部12で所定の時間あたりに端末装置の携帯者の加速度およびこの携帯者が進行する方位を取得し、情報処理し、受信処理部16でGPS衛星からのGPS信号48を受信し、受信したGPS信号48に含まれる情報を基に位置情報を取得して、所定の時間にわたって取得した位置情報を保持し、演算部14で取得した携帯者の加速度28および方位30から所定の時間あたりに3次元における軸それぞれの方向成分を用いて、端末装置の移動距離を演算し、演算した移動距離とGPS衛星から取得した位置情報とを用いて、擬似距離の誤差を解消して、GPS衛星の位置情報を補正する。
(もっと読む)
方位決定装置及び方法及びプログラム、位置算出装置及び方法及びプログラム、並びに、電子機器
【課題】GPS電波の受信状況が良好でない場合であっても、方位を高精度に決定することが可能な方位決定装置等を提供する。
【解決手段】GPS衛星からの電波を受信するGPSアンテナ11a、11bと、位置を算出するGPSユニット12a、12bと、地磁気に基づいて第1の方位を検出する電子コンパス13と、GPSユニット12a、12bによって算出された位置に基づいて第2の方位を算出し、第1の方位と第2の方位とを比較し、第1の方位と第2の方位とが一致する場合には、第1の方位及び/又は第2の方位を現在の方位として決定し、第1の方位と第2の方位とが不一致の場合には、第1の方位を現在の方位として決定するホストCPU14と、を含む。
(もっと読む)
GPS受信装置およびGPS測位システム
【課題】保管中に無駄な電力の使用を抑えることができ、且つ、保管時や再使用時に煩わしい操作を要することなく、起動時に速やかな測位が可能となるGPS受信装置およびGPS測位システムを提供する。
【解決手段】GPS受信装置の運動状態を検出して装置本体が移動状態にあるか静止状態にあるかを判別する判別手段(20,21)と、装置本体が静止状態に移行した場合にGPS電源をオンするとともに、装置本体が移動状態に移行したと場合にGPS電源をオフする電源制御手段(16)と、通信ネットワークを介して航法メッセージを取得可能な航法メッセージ取得手段(10〜12)と、装置本体が移動状態に移行した場合に、前記航法データ取得手段を介して航法メッセージを取得し、この取得した航法メッセージで記憶手段(19)に記憶された航法メッセージを更新する構成とした。
(もっと読む)
測位装置
【課題】無駄な電力消費を減らすことができ、且つ、装置の使用中に移動速度が変化した場合でも、適宜な間隔でGPS測位処理を実行することのできる測位装置を提供する。
【解決手段】電源用のバッテリと、このバッテリにより駆動されw、GPS衛星からの測位用電波を受信して現在位置を測定する第1の測位手段とを備えた測位装置である。そして、当該測位装置における装置本体の移動速度を検出する移動速度検出手段(S1,S2)と、この移動速度検出手段により検出された移動速度が所定値以下か否かを判別する判別手段(S3)と、この判別手段により前記移動速度が所定値以下と判別された場合に、前記第1の測位手段を間欠的に駆動させる間欠駆動手段(S11〜S15)とを備えている。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】自動的にGPS受信機能をオンオフ設定して省電力化する位置検出装置を実現する。
【解決手段】GPS信号受信処理部107がGPS信号を受信したか否かを判断する(ステップSA2)。屋内に移動してGPS信号受信処理部107がGPS衛星信号をロストすると、GPS信号受信処理部107に電源供給停止を指示する(ステップSA6)。屋内に移動した場合には、各センサ出力に基づき屋内での相対的な移動位置を検出する自律航法センシング処理を実行し(ステップSA8)、この自律航法センシング処理で得られる位置が屋内から屋外へ移動したか否かを判断する(ステップSA9)。屋外へ移動してGPS衛星信号を受信し得る状態になると、GPS信号受信処理部107に電源供給開始を指示する(ステップSA10)。これにより、自動的にGPS受信機能をオンオフ設定して省電力化することができる。
(もっと読む)
音響計測用観測船及び音響計測システム
【課題】河川、湖沼、沿岸海洋、ダム等における浅瀬の測深、河床地形や水中構造物の三次元情報の取得や、河床底質情報の取得等を行うことのできる音響計測用観測船及びこの観測船を利用した音響計測システムを提供する。
【解決手段】浅瀬21を航行可能な船体1に支持フレーム2を設置し、これに支柱部材8a、8bを水平軸の回りに回転可能とするように支持して、支柱部材8a、8bを船体の外周側における直立状態から支持フレーム2上の倒伏状態に回転操作可能に構成し、支柱部材8a、8bには、下側にサイドスキャンソナー12を支持可能とすると共に、上側にはGPS測位装置10、トータルステーション11用の反射体9、三次元位置センサ13を支持可能とし、船体にサイドスキャンソナー12、GPS測位装置10、三次元位置センサ13のデータを記録する記録装置17を設置した音響計測用観測船と、それを利用した音響計測システムを提案する。
(もっと読む)
ロバストなロケーション推定
位置の信頼できる推定を補足するために情報を収集する方法が提供される。方法は、第1の位置の信頼できる推定を導き出すのに十分な第1の情報を受信するステップと、第1の位置の付近の第2の位置の補足の推定が要求されうることを示す指示を受信するステップと、指示に応答して、第1の位置の付近の観測可能な少なくとも1つの地上無線ソースの識別を備える情報を検知することと、検知された情報を第1の位置に関連して格納するステップとを備える。方法は、第1の位置の信頼できる推定が、続いて少なくとも1つの無線ソースが観測可能である任意の前記第2の位置を推定するために使用されるようにすることができる。 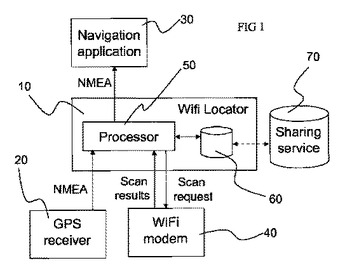 (もっと読む)
(もっと読む)
位置検出システム及び位置検出方法
【課題】検出対象の存在位置の推定精度が高い位置検出システムを提供する。
【解決手段】電波を放射する送信アンテナ15、複数の受信位置に配置され、電波を受信する複数の受信モジュール200A, 200B, 200C、複数の受信モジュール200A, 200B, 200Cが受信した電波の強度の複数の測定値から、電波の仮送信位置を算出する仮位置算出部301、送信アンテナ15の正面方向を検出するためのセンサ11、水平面における、仮送信位置から複数の受信位置への方位と正面方向との水平面偏差を算出する水平面偏差算出部303、重力方向を含む垂直面における、仮送信位置から複数の受信位置への方向と正面方向との垂直面偏差を算出する垂直面偏差算出部304、水平面偏差及び垂直面偏差による複数の測定値の誤差を補正する測定値補正部305、及び補正された複数の測定値から、電波の補正送信位置を算出する補正位置算出部306を備える。
(もっと読む)
走行位置検知装置
【課題】移動体の位置の検出精度を向上させる。
【解決手段】GPS電波受信アンテナ11の傾斜装置21は、回動軸および三角形状の板であるフレームを有する。走行位置検知装置10の装置本体には、回動軸が装置本体を貫通して移動体5の移動方向に軸方向が沿うように取り付けられる。フレームは、一頂点付近を回動軸が貫通して平板方向が回動軸の軸方向に対して直交するように回動軸に取り付けられる。移動体5が傾斜した場合には、GPS電波受信アンテナ11の平板方向が水平方向に沿ってGPS電波受信アンテナ11の受信面が重力に従って天頂方向を向くように、GPS電波受信アンテナ11がフレームおよび回動軸を介して移動体5に対して当該移動体5の移動方向に直交した方向に回動する。
(もっと読む)
走行状態推定システム
【課題】自律航法システムとGPSの各方式間の信号の遅延時間を高精度に補償して最終的に決定される測位データの精度を向上させること。
【解決手段】GPS信号に基づき第一のサンプリング周期で測位データを演算して推定手段に出力するGPS測位演算手段と、第一のサンプリング周期より短い第二のサンプリング周期で観測データを出力する自律航法用センサと、第一のサンプリング周期内に自律航法用センサから出力された観測データの組を所定の一次関数に近似する近似式演算手段と有し、該近似式演算手段が、測位データと略同期したタイミングにおける一次関数の近似式の値を切片の値とし、該切片の値を該近似式の傾きの値とともに自律航法データとして推定手段に出力するように構成された走行状態推定システムを提供する。
(もっと読む)
無線システムにおけるジオフェンスの動的創出の方法
ジオフェンスデバイスによって受け取られた疑似距離測定値の第1の集合を使用して即時参照点を決定すること、即時参照点へ参照される動的ジオフェンス区域を規定すること、疑似距離測定値の第2の集合を使用して測位を決定すること、及び測位を動的ジオフェンス区域と比較することによって、動的ジオフェンス区域を創出する方法及び装置。1つの態様において、比較結果に基づく警報メッセージがユーザへ提示される。 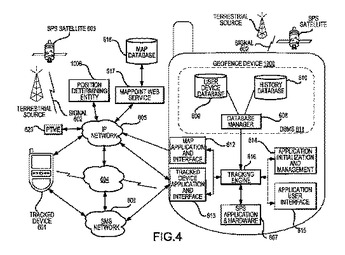 (もっと読む)
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
現在位置推定装置、方法及びシステム
【課題】登山等において、GPSシステムによる衛星からの電波を受信できない場合があっても、それまでの位置情報に基づいて現在位置を推定することができる装置を提供すること。
【解決手段】現在位置推定装置10は、地図情報DB33と気圧高度換算DB32とを有し、GPSシステムから受信したデータに基づく位置データと、気圧計91から取得した気圧データと、を対応付けて時系列に測定ログDB31に記録する。そして、測定ログDB31にそれまでに記録した気圧データと、新たに取得した気圧データと、に基づいて気圧高度換算DB32を参照して現在の高度を推定し、推定した当該高度と、測定ログDB31にそれまでに記録した位置データと、地図情報DB33に記憶した地形データと、に基づいて現在位置を推定する。
(もっと読む)
速度計測装置および変位計測装置
【課題】データサイズの制限による値域の制限を有するデータを用いる場合でも、新たに定義する不定値に基づく不定性の概念を利用することにより、受信点の速度を求めることができる速度計測装置、および受信点の変位を求めることができる変位計測装置を提供する。
【解決手段】データ処理部3は、搬送波位相のデータを含む測位用データに基づいて、搬送波位相の速度成分を算出する。続いて、データ処理部3は、搬送波位相のデータに関するデータサイズまたは時間間隔に応じた搬送波位相の速度成分の不定値を算出する。続いて、データ処理部3は、搬送波位相の速度成分に不定値を加算することによって、不定性を解消した搬送波位相の速度成分を算出し、それと方向余弦とに基づいて、受信点の速度を算出する。続いて、データ処理部3は、受信点速度を積算することによって受信点の変位を算出する。
(もっと読む)
モード切替可能航法無線機に用いる方法および装置
モード切替可能航法無線機等に用いる方法および装置が提供される。これらの方法および装置は、モード切替が可能にされうるかどうかを決定するための1つまたは複数の非タイミング型条件を考慮に入れたモード切替テストに少なくとも部分的に基づいて、特定の動作モード間で選択的に切替を行うように実装することができる。 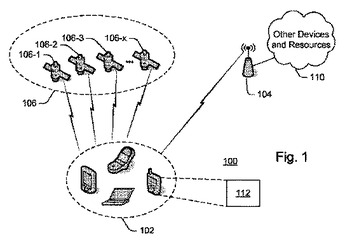 (もっと読む)
(もっと読む)
221 - 240 / 523
[ Back to top ]