
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
241 - 260 / 523
航法装置、航法装置の姿勢角計算方法および姿勢角計算プログラム
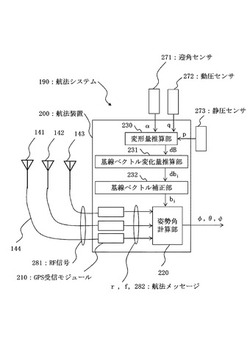
【課題】移動体が変形し、GPSアンテナ間の相対位置に変化が生じた場合でも、GPSアンテナ間の基線ベクトルに基づいて移動体の姿勢角を高精度に推定できるようにすることを目的とする。
【解決手段】移動体の機体には迎角センサ271,動圧センサ272および静圧センサ273が設置される。変形量推算部230は迎角センサ271、動圧センサ272および静圧センサ273から迎角α、動圧qおよび大気圧pを取得し、迎角α、動圧qおよび大気圧pに基づいて機体の変形量dBを計算する。基線ベクトル変化量推算部231は機体の変形量dBに基づいてGPSアンテナ間の基線ベクトルの変化量dbiを計算する。基線ベクトル補正部232は変化量dbiを加算して既知の基線ベクトルを補正する。そして、姿勢角計算部220は補正により得られた基線ベクトルに基づいて移動体の姿勢角(ロール角φ、ピッチ角θ、ヨー角ψ)を推定する。
(もっと読む)
位置推定装置

【課題】自己位置の推定の際に使用する距離計測値の精度を向上した位置推定装置を提供する。
【解決手段】移動装置1に搭載して当該移動装置1周囲の障害物Sまでの距離を計測する距離計測装置6Aと、その距離計測装置6Aによる計測値に基づき上記移動装置1の位置を推定する位置推定手段6Eと、を備える。距離計測装置6Aによる計測結果のうち、距離測定時における移動装置1の姿勢に対してロバストな計測値を選択して、位置推定手段6Eで使用する計測値とする。
(もっと読む)
携帯端末、ナビゲーション方法、及びナビゲーション用プログラム
【課題】携帯端末の位置測定の精度を維持しつつ、携帯端末を用いたナビゲーションを行う場合の消費電力を低減できるようにする。
【解決手段】本発明による携帯端末は、ナビゲーション機能を有する携帯端末であって、GPS信号に基づいて当該携帯端末の位置を測定するGPS測定部と、加速度センサの検出結果に基づく当該携帯端末のユーザの歩数に基づいて、当該携帯端末の移動距離を算出する移動距離算出手段と、前記移動距離算出手段が算出した移動距離に基づいて、当該携帯端末がガイドポイントに到達したか否かを判定するガイドポイント判定手段と、ガイドポイント判定手段がガイドポイントに到達したと判定したことに基づいて、前記GPS測定部の電源をオン状態に制御するGPS測定部制御手段とを備えたことを特徴とする。
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーションプログラム
【課題】移動体が傾斜のある場所を移動している際にも、加速度センサの出力に含まれるセンサ固有の誤差の補正が可能で精度よく移動体の現在位置を算出することが可能なナビゲーション装置を提供する。
【解決手段】所定時刻taのGPS速度Vg(ta)と時刻taから算出間隔経過後の時刻tbのGPS速度Vg(tb)の差分が許容値より小さいことにより移動体が等速度であると判定し、前回等速度と判定した時刻t1の加速度センサの出力値である加速度Axの平均値Ax1と、今回等速度と判定した時刻t2の加速度Axの平均値Ax2が一致することにより、時刻t1と時刻t2に移動体が移動する斜面の傾斜角θが同一として前記傾斜角θを求め、前記傾斜角θを用いて加速度センサの誤差αを補正値として算出し、加速度センサの出力を前記補正値により補正した値を用いて、移動体の現在位置を算出する。
(もっと読む)
複数モード位置決定方法およびシステム
方法、装置、および/又はシステムは、アイテムが大体静止していない場合に位置決定装置を用いて第1モード位置決定プロセスを選択的に開始し、アイテムが大体静止している場合に位置決定装置を用いて第2モード位置決定プロセスを少なくとも選択的に開始するために提供される。 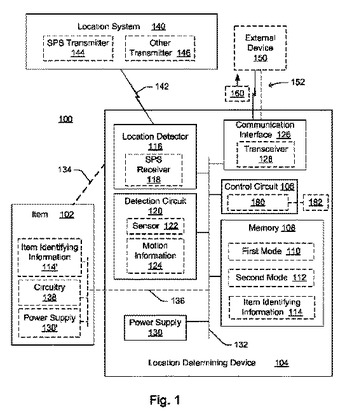 (もっと読む)
(もっと読む)
車両位置検出装置、車両位置検出方法
【課題】本発明では、当該車両位置検出装置のシステム構成を複雑にすることなく、自車両が駐車場等の開けた場所に存在するか否かを判定する車両位置検出装置、及び当該車両位置検出装置による車両位置検出方法を提供することを目的とする。
【解決手段】本発明に係る車両位置検出装置では、複数のGPS衛星から送信される測位信号に基づいて車両位置を検出する車両位置検出装置であって、測位信号を検出する測位信号検出手段と、測位信号検出手段により検出される測位信号を送信するGPS衛星の数を検出する衛星数検出手段と、衛星数検出手段により検出されるGPS衛星の数に基づいて、車両が開けた場所に存在するか否かを判定するオフルート判定手段と、を有することを特徴とする。
(もっと読む)
低電力センサを使用するGPS省電力
位置ロケーションシステム、装置及び方法が開示される。無線装置は、衛星測位システム(SPS)受信機及び位置ロケーションプロセッサを含む。SPS受信機は、測位信号の有効性を検出し、位置ロケーションプロセッサは、測位信号に基づいて無線装置の初期位置を決定する。測位信号が利用可能なものとして検出される場合、コントローラは省電力イベントを生成する。コントローラは、省電力イベントのタイミングおよび期間を決定する。省電力イベント中、無線装置の消費電力を低減するために、SPS受信機は非アクティブにされ、及び/または測位信号の処理はサスペンドされる。初期位置は、省電力イベント中に1以上のセンサからの相対的な測位情報に基づいて更新される。コントローラは、SPS受信機をアクティブにし、省電力イベントに続く測位信号の処理を再開する。  (もっと読む)
(もっと読む)
位置標定装置、位置標定システム、位置標定システムのユーザインタフェース装置、位置標定システムの標定サーバ装置および位置標定方法
【課題】車両が走行した位置を高精度に測位する。
【解決手段】位置姿勢標定装置100は、走行中の車両で取得された観測データ201、画像データ203およびレーザデータ205と予め位置が測量されている地物位置データ204とに基づいて車両の位置姿勢を標定する。地物DB検索GUI部120は、ユーザが指定した画像データ203を表示画像として表示し、地物位置データ204に基づいて撮像地域の地図を表示する。ユーザはランドマークが映っている画素とその地図表記とを指定する。三次元点群投影検索部140はレーザデータ205に基づく三次元点群モデル206を表示画像に投影し、指定画素に最も近い投影点を特定する。地物車両位置差分演算部150は投影点に対応するレーザデータ205を取得する。そして、車両位置姿勢標定部160はランドマークの既知座標とレーザデータ205が示す距離方位とに基づいて車両の位置を標定する。
(もっと読む)
無線周波数(RF)信号多重化
無線周波数(RF)受信機において、受信機RFチェーンは、第1の期間の間に受信機RFチェーンにおける第1の(例えば全地球測位システムGPS))チャネル上の第1の(例えばGPS)信号の受信を可能にするために、第1の(例えばGPS)チャネルに同調される。受信機RFチェーンは、第1の期間に続く第2の期間の間に受信機RFチェーンにおける第2の(例えばセルラページング)チャネル上の第2の(例えばセルラページング)信号の受信を可能にするために、第2の(例えばセルラページング)チャネルに同調される。第1の期間の間および第2の期間の間に第1の(例えばGPS)信号は、第2の期間の間の前記第1の(例えばGPS)信号のいかなる明白な中断も無く処理される。この処理は、例えば、実際の中断を第2の期間の間の第1の(例えばGPS)信号の一時的で短期間なフェージングとして扱うか、または、第2の期間の間のブリッジ信号(例えば受信機RFチェーンにおける推定GPS信号、または別の受信機RFチェーンで受信された実際のGPS信号)を提供する。 (もっと読む)
仮想基準局の使用のサポート
【課題】仮想基準局に対して決定される信号測定値に基づく測位。
【解決手段】仮想基準局の使用をサポートするために、装置が、仮想基準局に有効なビーコン信号の仮想測定値を提供するよう求める要求を受信するとよく、この要求には、仮想基準局の所望の場所の表示が含まれる。本装置はさらに、上記の所望の場所を含む領域に関連するエンティティを決定することができる。本装置はさらに、決定されたエンティティへ前記要求を転送させることができる。
(もっと読む)
トリガー動作衛星測位
衛星測位システムからの信号を処理する方法。この方法は、第1のトリガー信号のタイミングおよび第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用することを含む。この処理方法は、データの捕捉および格納方法および/またはデータのその後の処理方法を制御することも含むことができる。 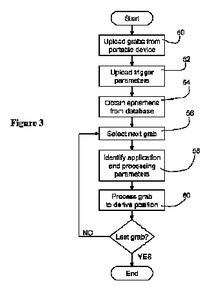 (もっと読む)
(もっと読む)
ハイブリッドSPS軌道データを用いた位置判定のための方法および機器
移動局が、衛星軌道データのハイブリッド合成を用いてその位置(または速度)および時間を判定するための方法およびシステム。一態様では、移動局は、確定点の判定において、ある衛星からの予測軌道データと、別の衛星からのリアルタイム軌道データとを合成する。合成は、同じまたは異なる衛星システム内の衛星に対して行うことができる。移動局は、ある期間におけるある衛星のリアルタイム軌道データ、および別の期間における同じ衛星の予測軌道データを用いることができる。別の態様では、移動局は、リアルタイム軌道データを用いて、予測軌道データ中のクロック・バイアスを補正することができる。クロック・バイアスへの補正は、リアルタイム軌道データを提供する同じ衛星にも、同じまたは別の衛星システム内の異なる衛星にも行うことができる。  (もっと読む)
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
GPSレシーバ
【課題】初回測位の精度が低い場合であってもその後の測定位置の精度低下を有効に避けることができるGPSレシーバを提供する。
【解決手段】GPS測位の結果に基づいてGPSレシーバが現在位置し得る第一の範囲を推定する現在位置推定手段と、第一の範囲に基づいて、過去のある時点でGPSレシーバが位置し得た第二の範囲を推定する過去位置推定手段と、過去のある時点のGPS測位で計算された過去測定位置が第二の範囲に含まれるか否かを判定する過去測定位置判定手段とを備え、過去測定位置が第二の範囲に含まれない場合には、推定位置の計算に該過去測定位置を使用しないようにGPSレシーバを構成する。
(もっと読む)
位置情報処理装置、位置情報処理プログラムおよび移動体端末
【課題】信頼性の高い測位情報を適切に選択することを課題とする。
【解決手段】測位情報の信頼性の度合いを示す信頼性指数を、移動体端末に装着されたGPS受信部によって測位された測位情報に関して算出する。また、移動体端末に装着された自律航法測位部によって測位された測位情報を用いて累積移動距離を算出し、当該累積移動距離を用いることで、信頼性指数を、当該自律航法測位部によって測位された測位情報に関して算出する。そして、信頼性指数が示す信頼性の度合いについて、いずれが高いかを比較する。比較した結果、信頼性の度合いが高いとされた信頼性指数に対応する測位情報を、位置情報の導出に用いる測位情報として選択する。
(もっと読む)
移動体用測位装置
【課題】擬似距離の誤差の大きい場合でも精度の良い測位演算を行う。
【解決手段】擬似距離を算出するPSR算出手段と、ADRを算出するADR算出手段と、擬似距離に基づいて移動体の位置を測位する測位手段と、衛星位置を算出する衛星位置算出手段と、前回周期における移動体の位置の測位結果と、前回周期における衛星位置の算出結果との差分ベクトルの大きさに基づいて、前回周期における擬似距離の推定値を算出する前回値PSR推定手段と、推定前回値に、前回周期と今回周期において算出された各ADRの差を足し合わせて、今回周期における擬似距離の推定値を算出するPSR推定手段と、擬似距離の誤差が所定許容範囲を超えたか否かを判定するPSR誤差判定手段とを備え、測位手段は、今回周期において擬似距離の誤差が所定許容範囲を超えたと判定された場合に、該擬似距離に代えて、推定擬似距離に基づいて、今回周期における移動体の位置を測位する。
(もっと読む)
移動体用測位装置
【課題】測位結果と他のセンサの検出結果とを精度良く同期させることができる移動体用測位装置の提供。
【解決手段】基準時刻における移動体の位置及び速度を測位する測位手段と、移動体の状態を検出する状態検出センサと、状態検出センサの検出結果をクロック周期で伝送する伝送路と、同期手段とを備え、同期手段は、複数のクロック周期に亘った状態検出センサの各検出結果のうちから、同期させるべき検出結果を特定する第1同期手段と、基準時刻を推定する推定手段と、第1同期手段により特定された検出結果が検出された検出時刻と、基準時刻との時間差を算出する時間差算出手段と、算出した時間差と、基準時刻における移動体の位置及び速度の測位結果とを用いて、検出時刻における移動体の位置を補間により算出し、該移動体の位置の算出結果と、第1同期手段により特定された検出結果とを対応付ける第2同期手段とを備える。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】GPSによる測位と慣性航法による測位とを行う測位装置において、消費電力の
削減を図ること。
【解決手段】カーナビゲーション装置1において、GPS衛星信号の受信状況を示す指標
値が、予め定められた第1低レベル条件を満足するか否かが判定され、満足すると判定さ
れた場合には、慣性航法用センサを起動状態(ON)とし、満足しないと判定された場合
には、慣性航法用センサを停止状態(OFF)とする制御が行われる。また、第1低レベ
ル条件を満足すると判定された場合には、上述した指標値が、第1低レベル条件よりもレ
ベルの低い第2低レベル条件を満足するか否かが判定され、満足すると判定された場合に
は、慣性航法演算処理が行われて慣性航法演算位置が出力位置に決定され、第2低レベル
条件を満足しないと判定された場合には、GPS受信部20により測位されたGPS測位
位置が出力位置に決定される。
(もっと読む)
241 - 260 / 523
[ Back to top ]