
Fターム[5J062FF04]の内容
Fターム[5J062FF04]に分類される特許
181 - 200 / 523
移動端末装置
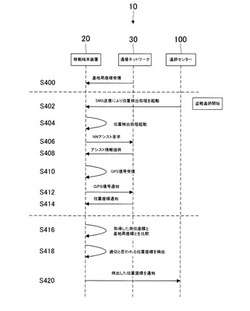
【課題】アシスト測位を利用して自己位置を検出する場合に、自己位置を誤認識することを防止する移動端末装置を提供する。
【解決手段】移動端末装置20は、追跡センター100からの問い合わせにより位置検出処理を起動し(S402、S404)、自己位置を検出するためのネットワークアシストを通信ネットワーク30に要求する(S406)。通信ネットワーク30からアシスト情報を受信すると(S408)、アシスト情報に基づいてGPS信号を受信し(S410)、受信したGPS信号を通信ネットワークに送信する(S412)。GPS信号に基づいて演算した位置座標を測位位置として通信ネットワーク20の測位サーバから受信すると(S414)、移動端末装置20は、S400で取得した基地局の位置座標と測位サーバから取得した測位位置とを比較し(S416)、適切な位置を自己位置として追跡センター100に通知する(S418、S420)。
(もっと読む)
車両位置測定装置および車両位置測定方法

【課題】GPS衛星からの電波を受信できない場所において、車両位置の測定精度を向上させること。
【解決手段】現在の車両の位置を推測し、推測された車両の位置を、推測された時刻と対応付けて累積して測位情報記憶部に書き込み、固定して設置された通信装置から送信される信号を受信し、信号が受信された際の車両の位置を受信された信号に基づいて検出し、信号が受信された時刻以降の時刻に対応付けて測位情報記憶部に記憶される車両の位置を、検出された車両の位置に基づいて更新する。
(もっと読む)
オンデマンド測位
本明細書で開示される主題は、2つ以上のロケーション決定技術を使用して、モバイルデバイスのロケーションを決定することに関する。 (もっと読む)
状態推定装置、方法、プログラム及びその記録媒体
【課題】未知の外乱がある環境で、対象物の位置等の状態(位置)の推定を高精度で行う。
【解決手段】状態パーティクルを用いて状態の推定を行うモンテカルロ・ローカリゼーション法を応用して、さらに変位量パーティクルを用いる。変位量パーティクルを用いることにより、対象物に与えられる外乱を考慮して対象物の変位量を推定することが可能となり、対象物の状態の推定を高精度に行うことができる。また、誘拐度Eを定義して、誘拐度Eが低い場合には、移動誤差を拡大することで状態パーティクルの存在範囲を広げる処理を行う。
(もっと読む)
マルチパス判定装置及びプログラム
【課題】簡単な構成で、GPS衛星からの受信信号がマルチパスであるか否かを精度よく判定することができるようにする。
【解決手段】GPS情報取得部20によって、GPS衛星からの電波を受信する。GPS情報取得部20によって、GPS衛星の情報、及びGPSアンテナ12A、12B間の受信信号の位相差を取得する。到来波相対方向推定部24によって、GPS衛星からの受信信号の位相差に基づいて、各GPS衛星からの電波の相対的な到来方向を推定する。到来波絶対方向算出部22によって、GPS衛星の情報に基づいて、各GPS衛星からの電波の絶対的な到来方向を各々算出する。マルチパス判定部26によって、推定された各GPS衛星からの電波の相対的な到来方向と、算出された各GPS衛星からの電波の絶対的な到来方向とを全体として比較することにより、各GPS衛星からの受信信号がマルチパスであるか否かを各々判定する。
(もっと読む)
可動機械用の位置監視システム
可動機械(20)および中央制御ステーション(30)を有するシステム(10)を提供する。可動機械は、通信装置(70)と、測位衛星(40)から位置データを受信するとともに位置信号を生成するように構成された受信機(55)を有する位置監視システム(50)とを有する。位置監視システムはまた、センサ(61、62、63)を有し、可動機械のパラメータを測定するとともに移動信号を生成するように構成された、慣性航法装置(60)も有する。位置監視システムはまた、位置信号および移動信号を受信し、位置信号が受信できないことを検出し、位置パラメータを計算し、パラメータの第1値と第2値との差が所定閾値を超えるか否かを確定し、警報信号を生成するように構成された、コントローラ(65)も有する。中央制御ステーションは、コントローラと通信し、位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。  (もっと読む)
(もっと読む)
変換係数導出装置および変換係数導出方法
【課題】状況に応じた距離変換係数を導出する技術を提供する。
【解決手段】前処理部40は、取得した測位データに含まれたGPS速度を所定の期間にわたって逐次平均するとともに、取得したパルスの数を当該期間にわたって逐次計測する。仮変換係数導出部42は、平均したGPS速度と、計測したパルスの数とをもとに、パルスの数から移動距離への変換係数に対する仮係数を逐次導出する。フィルタ処理部46は、導出した仮係数を逐次統計処理する。補正制御部44は、統計処理した仮係数、あるいは導出した仮係数を変換係数として出力する。
(もっと読む)
測位装置
【課題】マルチパスなどの衛星信号に対する悪影響を状況に応じて適切に除去できるようにして、的確な測位を行えるようにする。
【解決手段】アナログ部3A,3B,3Cにおいては、衛星信号に含まれるよけいな帯域外のノイズ成分をカットするフィルタリング処理を行うときに絞り込む帯域の幅が、アナログ部3A、アナログ部3B、アナログ部3Cの順に漸次広くなるように設定されている。そして、各デジタル信号処理部4は、アナログ部3A,3B,3Cのうちいずれか一つを選択して、その選択したアナログ部の処理した衛星信号を使用する。
(もっと読む)
受信機の位置決定
開示される方法及びシステムを使用してユーザ装置の位置を決定する。ユーザ装置は、データ信号及び/又は搬送波信号を、周回している宇宙船から受信することができる。これらのデータ信号は、ユーザ装置の測位計算及び/又は追尾維持に使用することができる。開示される方法及びシステムは、ユーザ装置の時間バイアス及び周波数バイアスの問題を解決することができる。追尾維持を行なう場合、カルマンフィルタ状態推定器を拡張してユーザ装置の速度を推定することができる。 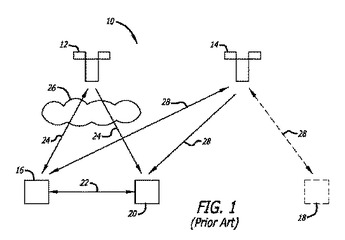 (もっと読む)
(もっと読む)
移動体用測位装置
【課題】連続性の低下による制御への影響を低減しつつ誤差を小さくするように、速度ベクトルを算出すること。
【解決手段】移動体に搭載される移動体用測位装置であって、複数の衛星から送信される電波を受信する受信手段と、前記受信手段により受信された電波を用いて移動体の速度ベクトルを算出する速度ベクトル算出手段と、前記移動体の停止状態を検出するための停止状態検出手段と、を備え、前記速度ベクトル算出手段は、前記停止状態検出手段により前記移動体の停止状態が検出された状態で、前記速度ベクトル算出手段が速度ベクトルの算出に用いている衛星が切り替わったときに、前記速度ベクトルの大きさを零にリセットする処理を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
移動体用測位装置
【課題】疑似距離の異常に関する判定をより正確に行なうこと。
【解決手段】複数の衛星から送信される衛星電波を用いて該複数の衛星と移動体との疑似距離を算出することにより、該移動体の位置を算出する位置演算手段と、前記衛星電波から把握される衛星の位置と、前記位置演算手段又は他の手段により算出された前記移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、を備え、前記視線ベクトル算出手段により算出された視線ベクトルと、前記リンクのうち移動体が存すると推定されるリンクと、のなす角度が所定角度を超える衛星について、前記地図データを用いたマップマッチングにより把握される前記移動体の位置を用いて、前記位置演算手段が算出する疑似距離の異常に関する判定を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラム
【課題】サーバから配信されるGPS測位の測位誤差情報を参照し、必要な区間のみセンサと連携したGPS測位を実行する。
【解決手段】複数の位置情報取得装置が、GPS測位系を用いて位置情報を取得し、所定の条件を満たしたときに、GPS測位時の推定位置誤差情報を検出して、取得した位置情報と検出した推定位置誤差情報とをデータサーバに送信する。一方、データサーバは、複数の位置情報取得装置から位置情報と推定位置誤差情報とを受信し、地図情報を所定の単位のブロックに分割し、該受信した情報から各ブロックに対応する推定位置誤差に関する分布データベースを生成して、その生成したデータベースに基づいて、各位置情報取得装置に推定誤差分布情報を送信する。そして、複数の位置情報取得装置は、その推定誤差分布情報を受信し、その受信したGPS測位時の推定誤差分布情報に基づいて、測位方法を選択して、その選択した測位方法により、位置情報を取得する。
(もっと読む)
移動体用測位装置
【課題】より正確な移動体の速度ベクトルを出力することが可能な移動体用測位装置を提供すること。
【解決手段】衛星電波を用いて移動体の位置を算出する位置演算手段と、衛星電波又は慣性航法により前記移動体の速度ベクトルを算出する速度演算手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、前記速度ベクトル算出手段により算出された速度ベクトルを、前記リンクのうち移動体が存すると推定されるリンクに投影した投影速度ベクトルを出力する投影手段と、前記投影手段により出力される投影速度ベクトルの採用の可否を判定する投影可否判定手段と、を備え、該投影可否判定手段により前記投影速度ベクトルを採用すべきと判定された場合に、前記投影速度ベクトルを前記移動体の速度ベクトルとして出力することを特徴とする、移動体用測位装置。
(もっと読む)
位置検出装置およびプログラム
【課題】GPS測位不能な電車乗車時でも現在走行している場所がどの駅とどの駅の間に位置しているのかを検出する位置検出装置を実現する。
【解決手段】本装置を携行したユーザが乗車する電車が発車すると、発車時刻と乗車駅名とに基づき時刻表経路検索データベース110を参照して乗車中の電車の路線名を検索すると共に、検索された路線における乗車駅以降の各停車駅毎の駅間距離を取得する。そして、走行中に計測される加速度データに基づきユーザが乗車する電車の移動距離(駅からの移動距離)を算出して地図表示し、発車した電車が駅に停車する毎に、発車駅から停車駅までの距離を時刻表経路検索データベース110から得られる駅間距離に書き換えて位置検出の誤差を補正する。この結果、GPS測位不能な電車乗車時でも現在走行している場所がどの駅とどの駅の間に位置しているのかを検出できる。
(もっと読む)
推測航法における高度成分の調整
ここに開示される主題は、センサーによる推測航法に少なくとも部分的に基づいて推定所在の高度成分を調整することに関する。 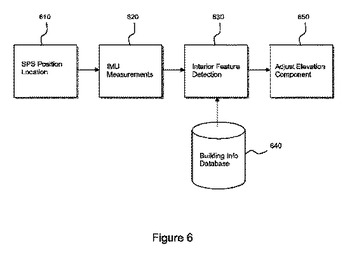 (もっと読む)
(もっと読む)
画像撮影システム、画像撮影装置およびその方法
【課題】撮影位置を適応的に可能な限り正確に検出して、撮影位置情報を画像情報に付加する。
【解決手段】本願開示の画像撮影装置は、撮影装置が使用可能な複数の位置検出用センサ(GPS176、方向センサ178,加速度センサ180および速度センサ182など)の内、画像撮影が行われている環境等に対応して、例えば、GPS信号が受信可能な位置においては、GPS176により位置情報を検出し、GPS信号が受信不可能な位置においては、その他のセンサにより位置情報を検出すると言ったように、使用されうる位置検出用センサの内、最適ないずれかが選択されるように構成されている。このように最適なセンサにより検出された位置情報は、カメラ150により撮影された画像に、指定された態様で付加され、表示あるいは記憶される。
(もっと読む)
高度情報を使用してデジタル地図を更新する方法
本発明は、デジタル地図を更新し且つグローバルナビゲーション装置をデジタル地図に一致させる方法に関する。そのようなナビゲーション装置は、衛星(22、26)からのGPS信号(20、24)に依存する。1つの適切に記載されたナビゲーション装置における位置誤差の原因は、GPSマルチパスの現象により発生する。緯度/経度方向のGPSマルチパス誤差は、高度における誤差と密接に相互に関連付けられることが明らかになってきている。GPSプローブデータの高度値を高度に対する基準仕様と比較することにより、低信頼プローブデータ(異常値)が容易に識別及び選別される。また、そのような技術は、特定の道路区分への一致及び慣性誘導装置等の他の位置決め技術に戻らないかを確認するために、移動ナビゲーション装置により用いられる。ローカル高度が確実に認識されない場合には、収集されたプローブデータから推定値が直接導出される。 (もっと読む)
トンネル内取締機対応の道路交通情報受信装置
【課題】トンネル内の取締機に対して高価なジャイロセンサ等のシステムを用いることなく安価な加速度センサだけで対応できて交通事故を防止に寄与する道路交通情報受信装置を提供する。
【解決手段】GPSモジュールから位置および速度データを受信し位置登録データメモリから現在位置に対応した道路交通情報を得て制御を行うCPUと、前記道路交通情報を聴覚的または視覚的に運転者に報知する報知部と、を備え、さらに位置登録データメモリの中にトンネル情報を登録し、加速度センサを備え、GPSモジュールから受信しなくなったトンネルでは、トンネル情報と加速度センサからのデータをハイパス・フィルタを介して用いて自車の位置と車速を算出し、トンネル内の取締機の警告をするようにした。
(もっと読む)
ナビゲーション装置及びナビゲーション用プログラム
【課題】より誤マッチングを少なくすると共に、誤マッチングから早期に回復する。
【解決手段】推測航法により求めた推測位置P1に対し、推測方位の信頼度とGPS方位の信頼度の高い方の信頼度に基づく想定方位誤差を求め、信頼度が高い方の方位と、最適候補地点に推測位置P1を補正した場合の進行方向の方位との方位差θが想定方位誤差の範囲内にない場合には推測位置P1を補正しない。推測軌跡方位の信頼度は、前回の信頼度、想定累積方位誤差、ジャイロ左右感度学習状態から、GPS方位の信頼度は、推測方位一致度、GPS速度、DOPから決定する。これにより、画面表示では最適候補地点に車両マークを移動させることで誤マッチングであっても、実際の推測位置P1は補正させず、未補正の推測位置P1を基準に次の推測位置P2を求めるので、次回以降のマッチング処理で、より早く正しい道路に車両マーク及び推測位置を復帰させることができる。
(もっと読む)
方位算出装置、方位算出装置の方位算出方法および方位算出プログラム
【課題】可視衛星数が少なくても正しい姿勢方位を少ない処理数で測定する。
【解決手段】加速度姿勢算出部210は加速度姿勢値を算出し、基線ベクトル鉛直成分算出部211は加速度姿勢値に基づいて基線ベクトル鉛直成分値を算出する。整数値バイアス候補算出部220は基線ベクトル鉛直成分値を用いて整数値バイアス候補を算出する。基線ベクトル候補算出部230は整数値バイアス候補に基づいて基線ベクトル一次候補を算出し、基線ベクトル残差検定部240は二重差残差検定により基線ベクトル二次候補を選定し、基線ベクトルなす角検定部250はなす角検定により基線ベクトル三次候補を選定する。方向余弦行列候補算出部260は基線ベクトル三次候補に基づいて方向余弦行列候補を算出し、方向余弦行列姿勢検定部261は加速度姿勢値に基づいて方向余弦行列を決定し、決定した方向余弦行列に基づいて算出される姿勢方位初期値291を出力する。
(もっと読む)
181 - 200 / 523
[ Back to top ]