
Fターム[5J070AB06]の内容
レーダ方式及びその細部 (42,132) | 送信信号 (3,620) | パルス波 (1,730) | 搬送波の周波数変化(パルス単位) (121)
Fターム[5J070AB06]に分類される特許
81 - 100 / 121
パルスレーダ装置
【課題】目標との間の相対速度が0でない場合に、1回の高分解能の測距結果を得るために必要な信号送信時間間隔を、本来検出すべき目標までの距離に適用できる範囲で短くした上で高精度に目標までの相対距離を検出する。
【解決手段】所定の周波数間隔ずつ変化する送信パルス列A、Bを時分割で目標方向へ送信することにより得られた受信信号から、パルス列Aに対応する複素ディジタルビデオ信号Aおよびパルス列Bに対応する複素ディジタルビデオ信号Bを生成し、複素ディジタルビデオ信号Aおよび複素ディジタルビデオ信号Bの虚部の符号を反転した複素共役ディジタルビデオ信号Bを乗算して相対速度計測用複素信号を生成する複素乗算手段17と、相対速度計測用複素信号の周波数スペクトルを求める周波数スペクトル分析手段18と、周波数スペクトルを用いて目標との相対速度を求める相対速度計測手段19とを備える。
(もっと読む)
組合せセンサシステム

【課題】屋外で使用する場合でも、センサ部への妨害行為を正確に判定できる組合せセンサシステムを提供する。
【解決手段】第1のセンサ(MWセンサ)3と第2のセンサ(PIRセンサ)4とを備えたセンサ部1と、前記第1のセンサ3からの第1検出信号d1に基づいて人体Pの移動距離M1を検出する移動距離検出回路21と、前記第1検出信号d1に基づいてセンサ部1から人体Pまでの距離D1を検出する距離検出回路20と、検出された前記移動距離M1が所定移動距離M0以上で、かつ、検出された前記距離D1が所定距離D0以下であるとき、妨害行為があったと判定して妨害検出信号a2を出力する妨害判定回路22とを有している。
(もっと読む)
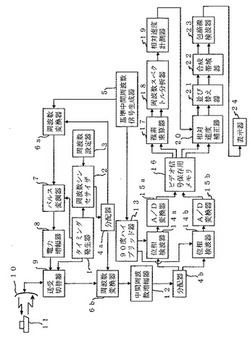
高分解能合成開口レーダ装置及び高分解能合成開口レーダ装置用アンテナ
本発明は高分解能合成開口レーダ装置に関するものであり、この高分解能合成開口レーダ装置10は、対象物12を走査するレーダ・ビーム16を生成するための少なくとも1つの送信アンテナTX1〜TX3と、対象物12で反射したレーダ・ビーム20、22、24を受信するための受信アンテナ14とを備え、受信アンテナ14は、高さ方向に列設された複数のサブ開口RX1〜RX17により構成されており、更に、この高分解能合成開口レーダ装置は、パルス信号18を不等間隔で送出するように構成されている。
(選択図)図1 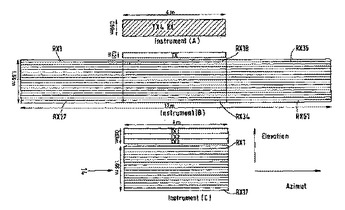 (もっと読む)
(もっと読む)
物体検知センサ
【課題】センサの真下付近から遠方を含む所定の監視領域に対して物体の位置を精度良く計測することができる物体検知センサを提供すること。
【解決手段】監視領域を物体検知センサ2からの距離に応じて複数の監視区画11,12,13に分割し、各区画を検知範囲とする複数のアンテナ3,4,5を切り替えて使用する。各アンテナ3,4,5の俯角方向のビーム幅は、物体検知センサ2の設置位置から遠い側を監視するアンテナほど小さくする。信号処理回路8において電波レーダの出力情報と電波照射経路とを照合することによって、設置した物体検知センサ2の真下を含む領域において物体の監視面内での位置を計測する。
(もっと読む)
無線通信装置および測距方法
【課題】データ通信と測距とが物理層を共用する場合であっても、データ通信と測距とを好適に実現するための技術を提案する。
【解決手段】無線通信装置は、データを送信するためのデータ区間とビーコンを送信するためのビーコン区間とを少なくとも含むフレームを用いて通信する。無線通信装置は、無線部と測距部を含む。無線部は、例えば、500MHz以上の帯域幅または中心周波数の20%以上となる帯域幅を有する無線信号を送受信する。また、測距部は、ビーコン区間を利用して、無線通信装置から測距対象物までの距離を測距する。
(もっと読む)
レーダ装置
【課題】覆域を損なうことなくパルスヒット数を稼ぎ速度成分を高精度に検出可能なレーダ装置を提供すること。
【解決手段】レーダパルスの中心周波数を変更することで、1つのPRIの中で複数の信号を送信し反射エコーを受信するようにする。このようにすることで、1つのPRIの中で同一の物標からの反射エコーを複数受信することができる。例えばPRI1では、中心周波数f0およびf1の反射エコーが受信され、PRI2では、中心周波数f0、f1およびf2の反射エコーが受信される。よって、これらの反射エコーを中心周波数毎に分離・処理することで、既存のレーダ装置よりも同一物標からの反射エコーの受信回数を多く取得することが可能となる。受信回数の増加はレーダパルスの積分につながり、これにより物標の検出性能を向上させることが可能になる。
(もっと読む)
レーダ検出および動的周波数選択
【課題】無線ネットワークとレーダシステムの干渉を避けるため、レーダ信号を通信信号から識別する方法が必要とされている。
【解決手段】無線ネットワーク装置は、相関モジュール、自動利得制御モジュール、および制御モジュールを含む。相関モジュールは、無線周波数(RF)信号の所定の部分における相関を求め、それに基づいて相関信号を発生する。自動利得制御(AGC)モジュールは、前記RF信号に基づき利得制御信号を発生する。制御モジュールは、前記相関信号および前記利得制御信号に基づき、前記RF信号がレーダ信号であるか否かを選択的に判定する。
(もっと読む)
通信機能を有する車載レーダー装置
【課題】UWBレーダーを車載に適用した場合、最適な制御方法,実装方法を検討する必要がある。
【解決手段】本発明は、通信機能、及び、レーダー機能を有するUWBを用いる。前方の障害物車両をレーダー機能で車間距離を測定し、その距離に応じてドライバーに危険警告を発する、もしくは、プリクラッシュ動作を行う。また、通信機能を用いて、車両間で互いに自車位置を通知することにより、外乱に依らず自車に近接する車両との距離を測定し、その距離に応じてドライバーに危険警告を発する、もしくは、プリクラッシュ動作を行うことにより達成される。また、自車位置情報によりレーダーの使用周波数、及び送信電力を変化させて、他の無線システムとの影響を低減する。
(もっと読む)
レーダシステム
本発明の実施の形態はレーダシステムに関し、特に地表に配置された対象を検知し追跡することに適した走査型レーダシステムに関する。ある実施の形態では、レーダシステムは走査型レーダシステムである。その走査型レーダシステムは、周波数発生器と、周波数走査型アンテナと、対象からの信号を受信して処理し、対象に伴うドップラー周波数を見出す受信器と、を備え、周波数発生器は、信号の組を複数生成し、その組はそれぞれ異なった特性周波数を有し、周波数発生器は、所与の特性周波数を持つ連続波信号を一連の変調パターンによって変調することで信号の組を生成するデジタルシンセサイザを含み、周波数走査型アンテナは、周波数発生器と協同して、発生された周波数に依存した角度範囲を有する領域に亘って放射を送受信する。したがって本発明の実施の形態は、精度良く周波数を生成し制御できるデジタルシンセサイザ技術と、受動的周波数走査技術及びドップラー処理技術を融合した。これにより、範囲および走査レートを正確に制御することが可能となり、対象の移動速度の早い遅いや信号対ノイズ比のような要素に対してレンジセルのサイズを最適化することが可能となり、したがって同様の電力を必要とする既知のシステムにおいて検知可能である距離よりもさらに大きな距離を隔てて位置する対象を検知することが可能となる。 (もっと読む)
物体測距
物体測距システムが、周波数掃引された信号から導出されるパルスを送信し、周波数掃引された信号と、物体からのその反射とを合成した信号のビート周波数を求めることによって動作する。2次(またはそれ以上の)の高調波が、その合成信号から導出される。したがって、ビート周波数、ひいては物体距離を求めるのが大きく改善される。この周波数掃引は、終了時よりも、各パルス繰返し間隔の始めにおいて著しく高い速度で周波数変化が生じるようになされる。したがって、周波数変化は、パルス送信の周期内で集中するので、近くの物体からの反射ですら、発信元の信号と反射との間の時間遅延が極めて小さい場合であっても、高いビート周波数を生じさせるであろう。  (もっと読む)
(もっと読む)
擬似直交波形レーダシステム、2次多相波形レーダ、およびターゲット位置決定方法
擬似直交波形の実施形態では、レーダシステム100は擬似直交波形を送信し、組合わせられた単一の受信機チャンネル信号で多重の相関を行う。2次多相波形の実施形態では、レーダシステム100は複数の送信アンテナにおける単一の2次多相波形の周波数分離されたバージョンを同時に送信し、各アンテナからの反射信号を組合わせて時間ドメイン信号を生成し、ターゲットの位置を突き止めるために組合された時間ドメイン信号でフーリエ変換を行う。レーダシステムは狙撃者の銃弾、入来する発射体、ロケット推進擲弾(PRG)、または迫撃砲の弾丸のようなターゲットを識別することができる。ある実施形態では、システムはターゲットの弾道を評価し迎撃することができる。実施形態ではシステムはターゲットの弾道を評価し、さらに狙撃者のようなターゲット源の位置を突き止めるためにターゲットの弾道を外挿することができる。 (もっと読む)
ボール計測装置
【課題】天候や明るさの影響を受けにくく且つ精度よく弾道計測が可能なボール計測装置の提供。
【解決手段】打撃位置から着地位置までのボールの弾道、着地位置及び停止位置を計測可能なボール計測装置100である。このボール計測装置100は、上記弾道の計測が可能で且つ少なくとも一つの送信アンテナと複数の受信アンテナとを備えたミリ波レーダ装置1と、上記停止位置の計測が可能なCCDカメラ2と、上記複数の受信アンテナにより受信された信号に基づいてボールの三次元座標を算出するレーダ用演算部と、上記CCDカメラの画像データに基づいて上記停止位置の座標を算出するカメラ用演算部とを有している。ミリ波レーダ装置1とCCDカメラ2とは互いに異なる位置に設置されている。
(もっと読む)
レーダー装置
【課題】 受信信号がミクサーに入る経路上に送信信号が漏れ込むことを防止することにより測定精度の向上の図られたレーダー装置を提供する。
【解決手段】 送信信号の一部を方向性結合器(DC)110において取り出し、可変減衰器(VATT)130及び可変位相器(VPH)150を用いて処理することにより、相殺信号を生成する。この相殺信号を低雑音増幅器(LNA)70の出力に結合器(COMB)160を用いて結合することにより、受信信号に含まれていた送信信号に基づく不要成分を相殺する。
(もっと読む)
レーダ装置
【課題】 ステップ周波数方式のレーダにおいて、レンジサイドローブ領域に発生するグレーティングローブの低減を図る。
【解決手段】 ステップ周波数を用いたレーダ装置において、ウェイト制御器9を設け、パルス圧縮器6における複素ウェイトを制御し、レンジサイドローブが上昇する距離領域における、受信感度応答特性の低減を図る。
(もっと読む)
距離測定装置、距離測定方法、およびそれらを用いた受信装置、通信装置、通信システム、距離測定システム
【課題】 低規模な回路構成で、距離を測定すること。
【解決手段】 距離測定装置10は、破線で示す送信処理部60と、モード選択部32と、局部発振部38と、破線で示す受信処理部70と、アンテナ22と、を含む。送信処理部60は、送信信号生成部12と、直交変調部14と、アップコンバータ16と、符号発生部18と、周波数シンセサイザ24とを含む。受信処理部70は、ダウンコンバータ26と、同期捕捉部28と、直交検波部34と、信号処理部36とを含む。モード選択部32は、通信対象の通信装置に対して通信処理を実行するための通信モードと、通信対象の通信装置との間の距離を測定するための測定モードとの少なくともいずれかを選択する。
(もっと読む)
位相測定原理による距離測定のための複数を目標とする方法
標本値を生成し任意に保存するために、周期的な信号(7)の時間離散放射と、受信信号のサンプリングを用いた、位相測定原理による距離測定方法において、目標物(2a、2b)までの距離が同時に決定され、それによって信号は目標物(2a、2b)によって反射され重ね合わされた信号部分を有する。数学的な信号モデルに基づいた統計的なパラメータ概算問題は、一つ以上の目標物(2a、2b)に対する目標値(2a、2b)の数がプリセットされ、又は根本的に目標物の数が上記方法によって決定され、不等式
【数1】
と
【数2】
が成立することによって解決される。
プリセットされた距離
【数3】
と
【数4】
ここで
【数5】
が、距離測定装置の測定範囲にセットされる。  (もっと読む)
(もっと読む)
防犯センサ
【課題】誤報が発生することを極力回避するとともに、特定方向の検知を禁止したり方向によって検知感度を変更可能とすることで動作の信頼性を高めることが可能な防犯センサを提供する。
【解決手段】検知エリア内に存在する物体までの距離に対応する距離情報を出力するマイクロウエーブセンサ320と、方向可変アンテナ装置310と、走査測定手段331と、物体移動距離認識手段336と、検知対象物体存在判別手段332と、受動型赤外線センサ140と、方向記憶手段335と、警告信号出力制御手段333とを備え、走査測定手段331によって求められた物体が存在する方向と方向記憶手段335に記憶されている検知制限方向情報のいずれかに対応する方向との差が所定範囲内であれば、検知対象物体存在判別手段332において検知対象物体が存在しているか否かの判別に用いられる閾値がより大きな値に変更される。
(もっと読む)
定在波測距装置
【課題】 定在波測距装置において、距離測定の高精度と高速化を両立させる。
【解決手段】 信号送受信部2から周波数をステップ状に変化させた送信信号を送出させ、サンプリング部3では受信信号の定在波を送信信号の周波数に同期したタイミングでサンプリングする。第1の距離計測部22で周波数ごとに空間伝播遅延時間に対応するサンプリング波形の振幅変動区間の時間幅に基づいて第1の距離値R1を算出するとともに、第2の距離計測部23で振幅が変動する区間を除く領域の振幅情報を、送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値R2を算出する。周波数ステップごとに距離値R1が得られるので、精度の高い距離値R2とともに高速化が図れる。
(もっと読む)
レーダ装置およびその指向性制御方法
【課題】 車両周辺監視用レーダ装置において、大型化を招くことなく簡単な構成で指向性を変化可能とする。
【解決手段】 アレイアンテナ部2で送受する送信、受信信号をRF回路部3で処理し、遅延時間差に基づいて信号処理部4の距離計測部22が距離を算出する。電磁波放射部18は所定の固定経路差でそれぞれ送信信号給電線に結合された複数のアンテナ素子からなり、スイッチ回路17が励振すべきアンテナ素子数を切り替える。送信周波数制御部23により送信周波数を変化させると検知方位が変化し、アレイ数制御部24によりスイッチ回路を制御してアンテナ素子数を変化させると検知幅が変化して指向性が変化する。検知エリア設定部26が走行環境等に基づいて必要な検知エリアを設定して送信周波数制御部23とアレイ数制御部24に指示することにより、自動的に電磁波放射部の指向性が変化される。
(もっと読む)
検出領域の設定装置
【課題】
監視領域を撮影した画像を用いて、監視可能な領域内の床面から高さのある任意の領域を検出処理の対象である検出領域として設定する設定装置を提供する。
【解決手段】監視領域を撮影した画像を表示し、画像上の二次元座標情報を床面上と床面以外とに区別して検出領域を指定するための指定点を入力し、床面上の指定点の二次元座標情報と撮像パラメータおよび床面以外の指定点の二次元座標情報を用いて床面以外の指定点の高さ情報を算出し、床面上の指定点は総て基準の高さ情報とし、床面以外の指定点は前記算出した高さ情報を用いて、画像上の二次元情報を三次元情報の検出領域情報に変換して検出領域情報とする設定装置。
(もっと読む)
81 - 100 / 121
[ Back to top ]