
Fターム[5J083AG05]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 組合せ (299) | 超音波(音波)探知装置と光学探知装置 (85)
Fターム[5J083AG05]に分類される特許
1 - 20 / 85
絶対速度推定装置
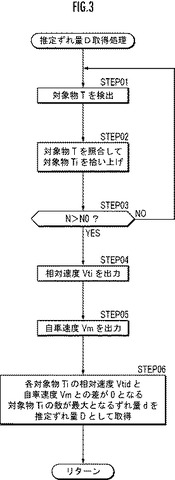
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
スイングドア自動開扉装置

【課題】従来のレーザセンサだけで障害物を検出していた発明では、表面に鏡面を有する障害物に対して、距離算出誤差が生じる可能性があった。これに対し本発明は、表面が鏡面である障害物に対しても、障害物までの距離検出精度の向上が可能なドア自動開扉装置を提供することを目的とする。
【解決手段】レーザとソナーの二つのセンサを組み合わせて用いて検出することで、高精度に、表面が鏡面となっている障害物にスイングドアが接触してしまうことを回避することができる。また、ソナーによる障害物検出結果を優先してスイングドアの開扉を決定することで、鏡面を有した障害物を障害物として検出した結果を必ず反映できるため、障害物への接触を避けることができる。
(もっと読む)
目標接近探知端末装置
【課題】警戒区域内に効率よく設置ができ、警戒区域内に接近した目標体を音声や映像等により探知することのできる目標探知装置を提供すること。
【解決手段】飛翔体により目標体の探知を行う所定の区域の上空から散布されて設置される探知端末1に、レンズ部4a撮影方向調節機構4bを有するカメラ4、太陽電池6、GPS6、音響センサ10、通信部12、パラシュート16を備え、制御部14の制御の下、カメラ4、GPS6、及び音響センサ10より取得した情報を外部端末に送信する。
(もっと読む)
音源定位装置
【課題】音源定位とそれら音源の属性の判定とを行なうことができる音源定位装置を提供する。
【解決手段】音源定位装置は、人の位置を検出するLRF(レーザレンジファインダ)群56と、マイクロホンアレイ群52の出力から得られる複数チャンネルの音源信号の各々と、マイクロホンアレイに含まれる各マイクロホンの間の位置関係と、LRF群56の出力とに基づいて、複数の方向の各々について、所定時間ごとにMUSICパワーを算出し、そのピークを音源位置として所定時間ごとに検出する音源定位処理部60と、マイクロホンアレイの出力信号から、音源定位処理部60により検出された音源位置からの音声信号を分離する音源分離処理部70と、分離された音声信号の属性を人位置計測装置58の出力を用いて高精度で判定する音源種類同定処理部72とを含む。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
画像表示装置
【課題】超音波を発生させる音源位置を特定して可視化でき、音源位置の特定精度の低下を抑制した画像表示装置を提供する。
【解決手段】第1のマイクロフォン群M1、M2及び第2のマイクロフォン群M3、M4で検出した超音波の伝搬速度の補正温度を設定する補正温度設定手段と、第1のマイクロフォン群への超音波の到達時間差及び補正温度に基づき、第1の方向に対する音源への角度を算出すると共に、第2のマイクロフォン群への超音波の到達時間差及び補正温度に基づき、第2の方向に対する音源への角度を算出し、第1及び第2の方向に対する角度から音源位置を算出する音源位置算出手段と、音源位置算出手段で算出した音源位置と、音源位置に対応させて表示領域に表示する撮像画像内における表示位置とを相関付けする相関手段と、相関手段で音源位置と相関付けされた表示位置に、音源位置の識別画像を表示する制御を行う表示制御手段と、を備える。
(もっと読む)
電子装置、硬さ算出方法、及びプログラム
【課題】音波を用いることにより、物体の硬さを検出する。
【解決手段】発振部110は、センサ用音波を発振する。検出部120は、物体で反射したセンサ用音波を検出する。距離算出部130は、発振部110がセンサ用音波を発振してから検出部120がセンサ用音波を検出するまでの時間に基づいて、物体までの距離を算出する。硬さ算出部140は、検出部120が検出したセンサ用音波の強度、及び距離算出部130が算出した距離に基づいて、物体の硬さを算出する。
(もっと読む)
音源推定方法及び音源推定装置
【課題】観測点で採取した音の音圧信号と映像信号とから音源を推定するとともに、推定された音源と観測点との距離をリアルタイムで算出する。
【解決手段】マイクロフォンM1〜M5とカメラとを備えた音・映像採取ユニットを第1の観測点P1に配置して音圧信号と映像信号とを採取し、マイクロフォンM6〜M9を備えた音採取ユニットを第2の観測点P2に配置して音圧信号を採取し、これらの音圧信号をA/D変換した音圧波形データを用いて推定した第1の観測点P1からみた音源方向の水平角θ1及び仰角φ1と第2の観測点P2からみた音源方向の水平角θ2とから第1の観測点P1と音源との距離Lを求めるとともに、第1の観測点P1で採取した映像信号をA/D変換した画像データと水平角θ1と仰角φ1とを用いて作成した画像中に音源の方向を示す図形が描画された音源推定用画像Gkと距離Lのデータとを表示画面に表示するようにした。
(もっと読む)
超音波測定用プローブの位置検出方法およびその位置検出装置
【課題】超音波測定用プローブ位置の誤検出を防止することができる超音波測定用プローブの位置検出方法およびその位置検出装置を提供すること。
【解決手段】超音波測定用プローブ1の位置に設けられ、超音波測定用プローブ1の位置から2種類の伝搬速度が異なる波動である赤外線および超音波を同時または所定間隔をおいて送波する赤外線送波器11および超音波送波器10と、予め既知の位置に所定の間隔Lを隔てて配置され、前記送波された各波動を受波する複数の受波器15a,15bと、各受波器15a,15bが検出した前記2種類の波動の到達時間差をもとに超音波測定用プローブの位置を検出する演算処理回路と、を備える。
(もっと読む)
ドリルヘッド位置推定システム、ドリルヘッド位置推定装置及びドリルヘッド位置推定方法
【課題】電磁波の減衰の影響を受けずに、また電磁波を探索する作業を伴わずに、地中のドリルヘッドの三次元位置を推定する、ドリルヘッド位置推定装置及びドリルヘッド位置推定方法を提供する。
【解決手段】HDD工法における地中のドリルヘッドの位置を推定するために、従来技術の電磁波の代わりにドリルヘッド先端から音を発生させ、地表に複数設けたセンサユニットで受信する。センサユニットに到達する音の時間差とセンサユニット同士の距離に基づいて演算し、ドリルヘッドの位置を推定する。また、ドリルヘッドの進行方向の反対側のセンサユニットから得られるデータは、音がドリルヘッドを回転駆動する駆動パイプを伝うために誤差が大きくなってしまう。そこで、無効になったセンサユニットを、備え付けられているLEDを発光制御させることにより、有効なセンサユニットと無効なセンサユニットとの、目視での判別を容易にすると共に、おおよそのドリルヘッドの位置が把握可能になる。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
位置検出装置及び位置検出方法
【課題】ロバストに物体の位置を検出する位置検出装置及び位置検出方法を提供する。
【解決手段】第1位置情報推定部は情報源を表す第1の態様の情報に基づいて第1の位置情報を推定し、第2位置情報推定部は前記情報源を表す第2の態様の情報に基づいて第2の位置情報を推定し、情報統合部は前記第1の位置情報及び前記第2の位置情報の各々と複数の粒子からなる粒子群を対応付け、対応付けられた粒子群に属する粒子毎の位置情報に基づいて前記情報源の位置情報を算出する。
(もっと読む)
港湾構造物計測装置
【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
音源推定用画像の表示方法とその装置
【課題】音の情報と映像の情報とを採取しながら、映像中に推定した音源方向を表示した音源推定用画像を作成して表示することのできる方法とその装置を提供する。
【解決手段】マイクロフォンM1〜M5とカメラ12とを一体化した音・映像採取ユニット10を用いて採取した音圧信号と映像信号とをA/D変換した音圧波形データ及び画像データをバッファ31に一時保存するとともに、バッファ31から予め指定されたサンプル数の音圧波形データを順次取り出して音源方向の推定を行った後、バッファ31から音源方向の推定に使用した音圧波形データに対応する画像データを取り出し、音源方向のデータと画像データとを合成して、画像中に音源方向を示す図形が描画された音源推定用画像Gを作成して表示装置40の表示画面40Mに表示し、しかる後に、音源推定用画像Gの作成に用いられた音圧波形データと画像データとを消去するようにした。
(もっと読む)
音源モニタリング装置
【課題】本発明は、音源をモニタリングする音源モニタリング装置に関し、音源を容易に特定する。
【解決手段】人の目先に置かれ透視した視界に重なる画像を表示するグラスモニタと、
グラスモニタに対する固定位置に置かれグラスモニタを透視して得られる視界内から発せられた音を捉えて音信号を生成する音センサと、
上記の音信号に基づいて視界内の音源を同定する音源同定部と、
グラスモニタ上の、そのグラスモニタを透視して得られる視界上の音源に重なる位置に、音源を表わす画像を表示する音源表示部とを備えた。
(もっと読む)
音源位置特定方法
【課題】 ネットワーク配線に加えて、マイクロホン接続のための追加配線を不要する、音源位置特定方法を提供する。また複数個あるマイクロホンで2種類以上のクロックを用いても音源位置特定を可能にした、音源位置特定方法を提供する。
【解決手段】 監視カメラ1、11は、マイクロホン2、3、12、13を有し、マイクロホン2、3、12、13により受音したオーディオ信号を元に音源方向情報を求め、サーバー20は、監視カメラ1、11で求められた音源方向情報に基づき、音源位置情報を特定する。
(もっと読む)
音の到来方向判定システム及びプログラム
【課題】正しく推定された音の到来方向と正しく推定できなかった音の到来方向とを識別可能に表示する。
【解決手段】音の到来方向判定システム100は、測定ユニット10の各マイクロフォンへの音の到達時間差から、パーソナルコンピュータ20の演算処理部23の音源位置推定部24により音の到来方向を推定する。虚音源位置判定部25は、推定された音の到来方向の信憑性を判定する。表示処理部26は、信憑性が低いと判定された音源位置と信憑性が高いと判定された音源位置をディスプレイ29上に識別可能に同時に表示する。
(もっと読む)
車両周辺監視装置
【課題】路面状態に拘わらず、受信した反射波から路面による反射波を取り除くことにより、車両周辺に存在する障害物の検知精度を向上させることができる車両周辺監視装置を提供する。
【解決手段】車載カメラ2が撮像した車両周辺の路面の撮像画像に基づいて、路面状態判断部3が路面状態を判断し、この路面状態に基づいて閾値パターン決定部6が閾値パターンを決定し、障害物検知部4が決定された閾値パターンを用いて受信した反射波から路面による反射波を取り除いた後の信号に基づいて障害物の有無を検知することにより、路面状態に応じて適切な閾値パターンが決定され、路面状態に拘わらず、受信した反射波から路面による反射波を取り除くことができ、車両周辺に存在する障害物の検知精度を向上させる。
(もっと読む)
制御システム
【課題】主に制御対象の機器の消費電力を低減することが可能となる制御システムを提供すること。
【解決手段】機器2の制御を行う制御システム1であって、対象領域において、基準位置から当該基準位置に最も近い物体までの距離の変化を検出する距離変化検出部13cと、距離変化検出部13cにより距離の変化が検出された場合、機器2の制御を行う機器制御部13bとを備えた。
(もっと読む)
物体の自動認識方法及び物体の自動認識装置
【課題】処理が複雑になることなく、超音波を用いてあらゆる材質の物体の距離計測と形状認識とを正確に行うことが可能な物体の自動認識方法及び物体の自動認識装置を提供する。
【解決手段】特定の空間を撮像してイメージ画像を取得する画像取得工程と、イメージ画像に基づいて、そのイメージ画像に写る輪郭を囲んだ小領域にて分割された輪郭画像を作成する画像処理工程と、前記空間に超音波を送信する超音波送信工程と、前記超音波が反射して生成された反射波を受信する超音波受信工程と、前記反射波の受信信号を測定して、この受信信号の強度に基づいて、空間の物体の存在及び距離を表示する受信信号分布画像を作成する受信信号測定工程と、前記輪郭画像と受信信号分布画像とを重合わせる重合わせ工程と、前記重合わせにより、前記輪郭画像において、受信信号が重なる小領域を物体の輪郭であると特定する物体特定工程とを備えた。
(もっと読む)
1 - 20 / 85
[ Back to top ]