
Fターム[5J084AA05]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 距離 (1,344)
Fターム[5J084AA05]の下位に属するFターム
変位、厚さ、深さ (53)
Fターム[5J084AA05]に分類される特許
161 - 180 / 1,291
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
目標検出装置およびシステム

【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
レーザレーダおよび受光装置
【課題】簡素な光学フィルタにより目標領域からの反射光を適正に受光することができ、かつ小型化を図ることのできるレーザレーダおよび受光装置を提供する。
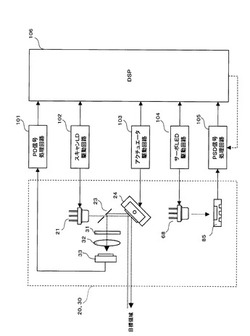
【解決手段】レーザレーダは、レーザ光を出射するレーザ光源21と、レーザ光を目標領域において走査させるミラーアクチュエータ24と、目標領域からのレーザ光の反射光を収束させる受光レンズ32と、受光レンズ32により収束された反射光を、受光レンズ32に入射する際の反射光よりも小さいサイズとし、且つ、平行光に近づけるための凹レンズ33と、凹レンズ33を透過した反射光が入射され、レーザ光の波長帯以外の不要な光を除去するためのバンドパスフィルタ34と、バンドパスフィルタ34を透過した反射光を受光する光検出器35と、を備える。
(もっと読む)
移動体の距離測定装置
【課題】距離測定中に、距離測定装置を搭載した移動体と、その移動体周囲の物体(被測定物)との距離が時々刻々変化する事態が発生しても、周囲物体までの距離をより安定的に測定可能とする。
【解決手段】車両MMの外方に向けて、上下方向に幅を有して横方向に延在した発光領域を有するパルス光を時間変調させて投光すると共に、予め設定した撮像領域内に位置する上記投光したパルス光を撮像し、撮像した画像から同期検波により上記パルス光を抽出する。そして、抽出したパルス光上端のエッジ部を検出して、その検出したエッジ部と車両MMとの距離を算出する。
(もっと読む)
レーザレーダおよび受光装置
【課題】投射光学系と受光光学系が同一筺体内にあっても、目標領域からの反射光を適正に受光することができるレーザレーダおよび受光装置を提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、レーザ光を目標領域において走査させるミラーアクチュエータ24と、目標領域からのレーザ光の反射光の角度成分と異なる角度成分の光を除去する視野コントロールフィルム32と、視野コントロールフィルム32を透過した反射光を受光する光検出器35と、反射光を光検出器35に集光させる受光レンズ34と、を備える。筐体10内で反射または回折した後受光レンズ34に向かう光は、視野コントロールフィルム32によって除去される。
(もっと読む)
光符号変調パルスの相関処理方式
【課題】光符号変調パルスの相関処理方式におけるサイドローブ雑音を低減すること。
【解決手段】光周波数シフタ12により光ファイバ1のブリルアン周波数シフトと同程度ダウンシフトされた連続光と、光変調器3により相関符号系列信号発生器13からの相補相関符号変調信号で変調されたポンプ光とが光ファイバ1中で干渉して発生する音波によってブリルアン増幅された前記連続光の受信信号を処理する際、相補相関符号系列信号A1(t)及びその要素を交換したA1-(t)による応答信号RA1(t)及びRA1-(t)の差信号ΔRA1(t)にステップ応答関数h(t)の逆数g(t)を乗じて音波の減衰を補正したA1(t)g(t)とΔRA1(t)との相互相関処理をした結果と、同じく相補相関符号系列信号B1(t)及びB1-(t)による応答信号RB1(t)及びRB1-(t)の差信号ΔRB1(t)にg(t)を乗じたB1(t)g(t)とΔRB1(t)との相互相関処理をした結果を合成する。
(もっと読む)
レーザレーダ装置およびレーザ合成開口レーダ装置
【課題】レーザレーダ装置(ライダ装置)において、測定可能距離を長くすると共に、距離測定分解能を向上させることを目的とする。
【解決手段】時間変化に対し周波数が変化する検出用信号を生成する検出用信号生成部12と、検出用信号によって発振光を変調するレーザ発振・変調部14と、レーザ発振・変調部14によって変調されたレーザ光を送信する送信光学系17と、レーザ反射光を受信する受信光学系18と、受信されたレーザ反射光に対し復調を行う復調部20と、復調された復調信号とのタイミングを、レーザレーダ装置10の位置に応じて調整する遅延時間設定部24と、遅延時間設定部24によってタイミングが調整された参照用信号を生成する参照用信号生成部13、および参照用信号と復調信号との差異を示す差異信号を生成する差異信号生成部22と、差異信号に基づいて、目標物の情報を取得する情報記録・処理部30とを備える。
(もっと読む)
物体検出ユニット
【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
障害物検知装置
【課題】表面状態の検出を可能とし得て、しかも、障害物とレーザとの間に設けた出射面の表面状態をリアルタイムに検出することができ、その表面状態に対応したレーザ光を照射する障害物検知装置を提供する。
【解決手段】本発明は、レーザ光源2と、レーザ駆動部3と、レーザ光源2から照射されたレーザ光をビーム偏向するビーム偏向素子4と、電圧制御部5と、出射面9と、受光面10と、検出器7と、コントロール部6と、を備え、ビーム偏向素子4の偏向角の一部のレーザ光を利用して出射面9の表面状態を計測するように出射面9に対して斜めから入射する反射ミラー11,12,13と、出射面9で反射したレーザ光を受光する検出器8と、を備え、コントロール部6は、電圧制御部5での電圧制御により出射面9の表面状態を計測した後に出射面9を透過する前方検出用のレーザ光を出力する。
(もっと読む)
物体検出装置及びこれを備えた車両衝突回避システム
【課題】検出対象物の誤検出が発生しにくい物体検出装置を提供することを課題とする。
【解決手段】探査レーザー光源から照射されるレーザー光を偏向器により走査し、その走査範囲からの反射光の強度に基づいて当該走査範囲内に存在する障害物を検出する物体検出処理を行う。物体検出処理では、走査範囲全域にレーザー光を走査して障害物の一次検出を行い、障害物を一次検出した場合には、障害物の検出箇所を含む所定範囲に走査範囲を限定して再びレーザー光を走査し、これにより検出した反射光の強度に基づいて障害物の2次検出を行う。
(もっと読む)
追尾式レーザ干渉測定装置の標的間絶対距離計測方法および追尾式レーザ干渉測定装置
【課題】絶対距離計などの複雑な装置を利用することなく、簡単な機構を追加するだけで、追尾式レーザ干渉測定装置の機構の回転中心と標的との距離が長い場合でも絶対距離を高精度に計測できるようにする。
【解決手段】 標的31にレーザ光を照射するレーザ干渉計13と、レーザ干渉計13の出射方向を変える2軸回転機構11,12と、2軸回転機構11,12を制御してレーザ干渉計13で標的31を追尾させる追尾式レーザ干渉測定装置10の標的間絶対距離計測方法であって、並進移動機構14により、レーザ干渉計13を第1位置に配置し、この第1位置で標的31をレーザ光20で捕捉し、次に、レーザ干渉計13を第2位置へ移動させ、この第2位置で標的31をレーザ光21で捕捉し、標的31の固定位置、第1位置および第2位置を頂点とする三角形についての幾何学演算を行い、第1位置にあるレーザ干渉計13と標的31との絶対距離Lを計測する。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】ミラーの回動精度を保ちつつ、可動部に対する給電を円滑に行い得るミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ1は、支軸24について回動可能なミラーユニットフレーム11と、支軸17に配されたミラー19と、マグネットユニット20とミラーユニットフレーム11とを連結するサスペンションワイヤー26a〜26fと、ミラーユニットフレーム11と支軸17とを連結するサスペンションワイヤー16a〜16dとを備える。サスペンションワイヤー16a〜16d、26a〜26fにより、ミラーユニットフレーム11に装着されたチルトコイル11bと、支軸17に装着されたパンコイル12b、13bに給電でき、ミラーユニットフレーム11と支軸17に対し、一定かつ安定的な抗力が付与される。
(もっと読む)
測距装置
【課題】簡素な構造で複雑な付加演算を必要とせず、高速応答可能で、かつ、スポット欠けによる誤測距を回避できる測距装置を提供する。
【解決手段】距離算出部20は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、受光素子4上の光スポットの位置を求め、この光スポットの位置に基づいて、受光素子4から測距対象物5までの距離を算出する。エラー検出部21は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、光スポットの形状を数値化し、この数値化された数値と予め定められた閾値とを比較して、この数値が予め定められた条件に従わないと、エラー信号を出力する。
(もっと読む)
光測距装置
【課題】作業者の作業精度に影響されることなく、可動部の揺動角度を高精度に校正する。
【解決手段】光を2次元走査する光走査部2と、光走査部2を駆動する駆動部3と、光ビームを投光する光源部4と、物体からの反射光を受光する受光部5と、投光及び受光タイミングに基づき物体までの距離を計測する測距部6と、投光タイミングと、入射光線ベクトルと、光走査部の2軸回りの各揺動振幅とを含む変換パラメータを用いて測距部6からの距離データを点群データに変換するデータ変換部7と、基準特徴度データと実測特徴度データとの誤差が閾値以内であるか否かを判定する判定部8と、誤差が閾値より大きい場合、各揺動振幅の実際の値を決定する第1及び第2駆動信号の電流値の少なくとも一方を、判定部8により誤差が閾値以内であると判定されるまで、変更設定可能な設定変更部9と、を備えて構成する。
(もっと読む)
レーザレーダ
【課題】簡素な構成の光検出器により目標領域からの反射光を適正に受光することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光源21と、ピンホール23aを有するピンホール板23と、ピンホール23aを通過したレーザ光を目標領域において走査させるミラーアクチュエータ25と、目標領域により反射され、さらに、ピンホール板23のミラー面23bによって反射されたレーザ光を受光する光検出器33とを備える。ピンホール板23は、レーザ光の光軸に対して傾くように配置され、レーザ光源21側と反対側の面がミラー面23bとなっている。ミラー69が回動しても、光検出器33に対する反射光の入射位置は変化しないため、単一受光面の小さな光検出器33により、反射光を適正に受光することができる。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
距離計測装置、距離計測方法、およびプログラム
【課題】計測時間の長時間化や特殊な撮像素子を用いることなく、アクティブ型の距離計測装置における輝度ダイナミックレンジを拡大する。
【解決手段】計測対象物に対して投影される計測用のパターン光の輝度値を、当該パターン光の二次元位置ごとに所定の輝度値範囲で変調させる変調部と、変調部により変調されたパターン光を計測対象物に対して投影する投影部と、投影部によりパターン光が投影された計測対象物を撮像する撮像部と、撮像部により撮像された撮像画像に基づいて計測対象物までの距離を算出する距離算出部と、を備える。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
161 - 180 / 1,291
[ Back to top ]