
Fターム[5J084AA05]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 距離 (1,344)
Fターム[5J084AA05]の下位に属するFターム
変位、厚さ、深さ (53)
Fターム[5J084AA05]に分類される特許
141 - 160 / 1,291
物体検出装置
【課題】光学窓の汚れを検出するための受光素子を設けることなく、光学窓の汚れを検出できるようにする。
【解決手段】鉛直下方向を含む面内を走査するようにレーザー光の向きを変化させて光学窓を介して照射するとともに、レーザー光が物体に反射した反射光を光学窓を介して受光するレーザーセンサ10を備え、レーザー光の照射方向を鉛直下方向に変化させて、路面に反射した反射光が検出されたか否かに基づいて光学窓の汚れを判定する(S202〜S216)。
(もっと読む)
プラットホームドア用安全装置

【課題】 従来より耐久性を向上することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置30は、プラットホームドア20に設置されてプラットホームドア20の近傍に存在する物体を検出するタイムオブフライト方式の三次元センサ40と、入射光に対して反射光を減衰する光減衰部50とを備えており、三次元センサ40は、所定の範囲に赤外光を発する複数のLEDと、複数のLEDから発せられて物体によって反射された赤外光を受ける複数の受光素子とを備えており、複数の受光素子は、前記所定の範囲のうち各々の担当の範囲からの光を受け、複数のLEDは、複数の受光素子の各々の担当の範囲に光を同時に発し、光減衰部50は、複数のLEDから発せられた赤外光の少なくとも一部が入射する位置に配置されていることを特徴とする。
(もっと読む)
監視方法及び監視装置
【課題】監視範囲が遠距離まで設定されている場合であっても、精度よく監視範囲内における物体を検出することができる監視方法及び監視装置を提供する。
【解決手段】レーザ光を投光する投光部11と、レーザ光を垂直方向に走査させる垂直スキャナ12と、レーザ光を水平方向に走査させる水平スキャナ13と、レーザ光の反射光を受光して受光情報d4を発信する受光部14と、受光情報d4から物体の距離を算出する距離演算部15と、投光部11、垂直スキャナ12及び水平スキャナ13の制御を行う制御部16と、を有し、監視範囲Sは水平スキャナ13の上死点又は下死点を基準にして設定され、垂直スキャナ12は水平スキャナ13よりも走査速度が高速に設定されている。
(もっと読む)
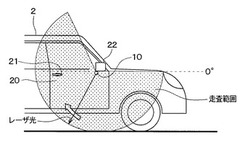
植生検出装置及び植生検出方法
【課題】座標変換などのシステムの統合を容易にし、またコストや物理的サイズも抑え、夜間など暗い環境にも対応する植生検出装置を提供する。
【解決手段】植物の葉で吸収されにくい波長の第1の3次元レーザレーダ21と、吸収されやすい波長の第2の3次元レーザレーダ22とから出力された計測値(距離、角度、反射率)を取得する第1及び第2の3次元点群取得部11及び12と、第1の3次元レーザレーダ21による第1の計測点と、その第1の計測点に最も近い第2の3次元レーザレーダ22による第2の計測点とを対応づける対応付け部16と、対応づけられた第1及び第2の計測点について、第1の計測点の反射率と第2の計測点の反射率との比を求める反射率比算出部15と、反射率の比に基づいて互いに対応づけられた計測点が植物か否かを判定する判定部17とを備えている。
(もっと読む)
距離センサ及び距離画像センサ
【課題】電荷発生領域から電荷収集領域に転送される電荷の移動速度が高速になる距離センサ及び距離画像センサを提供する。
【解決手段】画像距離センサは、二次元状に配置された複数のユニット(画素P)からなる撮像領域を半導体基板上に備え、ユニットから出力される電荷量に基づいて、距離画像を得る距離画像センサにおいて、1つのユニットは、入射光に応じて電荷が発生する電荷発生領域(転送電極5の外側の領域)と、空間的に離間して配置され、電荷発生領域からの電荷を収集する半導体領域と、半導体領域の周囲に設けられ、電荷転送信号が与えられ、半導体領域を囲む転送電極5と、電荷発生領域から半導体領域へ向かうポテンシャル勾配を急にするポテンシャル調整部6と、を備える。
(もっと読む)
距離画像生成装置
【課題】精度の高い距離画像を生成することができる距離画像生成装置の提供。
【解決手段】変調した変調光を照射する発光源と、対象物で反射した反射光を受光して電荷に変換する複数の光電変換素子、前記光電変換素子ごとに設けられた複数の電荷蓄積部、及び、前記光電変換素子により変換された電荷を前記複数の電荷蓄積部に振り分ける手段と、を備えた撮像素子と、電荷に基づいて所定演算を行い、画素値が距離値である距離画像を生成する距離画像生成部と、光量を調整する光量調整手段と、電荷に基づいて、対象物で反射した反射光成分の振幅値を演算する演算手段と、前記光電変換素子の数をカウントするカウント手段と、を備え、前記光量調整手段は、前記カウント手段によりカウントされた光電変換素子の数が一定数を越えたとき、前記発光源の変調光の光量を下げるように調整する。
(もっと読む)
パノラマ画像作成方法及び3次元レーザスキャナ
【課題】測定範囲に対応するパノラマ画像中のコントラストが最適となる様にするパノラマ画像作成方法及びパノラマ画像中のコントラストが最適となる画像データを取得する。
【解決手段】測定対象物72,73,74を含む様に測定範囲70を設定し、測定範囲を所要分割して複数の区画71を設定し、各区画毎に撮影した画像を合成してパノラマ画像80を作成するパノラマ画像作成方法に於いて、各区画毎に複数の撮像条件で撮影し、少なくとも測定対象物については、最適な撮像条件で撮影された画像が用いられてパノラマ画像が合成される。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測するために有利な波長走査干渉計を提供する。
【解決手段】波長走査干渉計は、光源から射出される光束の波長を変更しながら該光束から分割された参照光と被検光との干渉光の信号に基づいて被検体までの絶対距離を計測する。波長走査干渉計は、前記光源から射出される光束の波長が互いに等しい時刻である第1時刻およびその後の第2時刻と、前記第1時刻、前記第2時刻のそれぞれにおける前記干渉光の信号の周波数である第1周波数、第2周波数とに基づいて、前記被検体の移動による誤差成分が低減された絶対距離を算出する処理部を備える。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が光入射面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と裏面1BKとの間に位置すると共に、裏面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
距離測定装置及びカメラ
【課題】距離を正確かつ安全に測定することができる距離測定装置及びカメラを提供する。
【解決手段】オートフォーカス機能によって取得された画像データの画像処理を行って顔を検出し、顔以外の部分にレーザ光を照射して人Mまでの距離を測定する。正確な距離情報が得られたフォーカスエリアFAと他のフォーカスエリアFAとの差分からすべてのフォーカスエリアFAにある物体までの距離を算出し、ファインダ枠50内の全部の物体までの距離情報を取得する。
(もっと読む)
距離速度測定装置
【課題】スペクトル拡散方式による距離速度測定装置において、高精度に距離と速度を測定すること。
【解決手段】照射光を強度変調する拡散符号として、PN符号と周期符号との論理和をとった変調符号を用いる。周期符号の周期は、パルス幅の6倍以上とする。このような変調符号は、自己相関関数のピークが鋭いため、精度よく目標物までの距離を算出することができ。また、ローカル光と反射光とのビート信号をサンプリングする際に、周期符号の符号1のタイミングにおいては信号強度が0とはならないので、ビート信号を高精度に算出することができ、目標物の速度を共に高精度に測定することができる。
(もっと読む)
距離測定器及びその製造方法
【課題】低コストで製造され、小型で、検出する光量の損失が少なく、高精度に測定を行うことができる距離測定器を提供する。
【解決手段】光源1は、ホルダ81に固定され、レーザ光Lを射出する。有孔ミラー2は、光源1から射出されるレーザ光1の光軸に対して傾斜し、光源1からレーザ光Lを照射される照射領域Aが、光軸方向から見てレーザ光Lのファーフィールドパターンとなるように、ホルダ81に対して空間的に固定されたホルダ82に固定され、照射領域Aに、レーザ光Lに対して光学的に阻害がない透過部20を有する。走査部3は、透過部20を透過したレーザ光Lを、被測定物7に向けて反射させる。検出部5は、被測定物7において反射し、有孔ミラー2において反射したレーザ光Lを検出する。処理部6は、光源1及び検出部5の駆動を制御し、検出部5の出力に基づいて被測定物7までの距離を算出する。
(もっと読む)
空間計測システム及び計測方法、並びに昇降機制御システム
【課題】レーザセンサを用いて監視領域を計測して人や荷物(物体という)の存在状況を監視することで、監視領域へ物体が進入することができるかを判断する。
【解決手段】監視領域にレーザセンサにてレーザ光を照射して監視領域から測距データを得るレーザ監視装置と、特定する物体の三次元のサイズを大きさ毎に複数に区分して予め登録しておく物体認識データベースと、レーザ監視装置によって得られた監視領域の測距データについて、監視領域の背景データとの差分を取って、物体の三次元のデータを算出する検知部と、検知部で算出された物体データと、物体認識DBに登録された物体のサイズとを照合する判断部とを有し、判断部は、照合の結果、検知された物体の大きさが、物体認識DBに登録された特定物体サイズを超えていると判断した場合、その旨を示す情報を出力する。
(もっと読む)
光学情報読み取り装置
【課題】読み取り速度を向上させることができる光学情報読み取り装置を提供する。
【解決手段】光学情報読み取り装置から撮像対象物の複数の点までの距離を測定し(ステップS1)、測定した距離に基づいて、受光センサが撮像した画像を複数の領域に分割する(ステップS2)。そして、分割した領域から読み取り領域を絞り込む(ステップS3)。距離により画像を複数の領域に分割することから、輝度変化やエッジに基づいて領域を分割する場合と異なり、QRコード(登録商標)に起因する輝度変化以外の種々の輝度変化が撮像対象物にあってもその影響を受けない。よって、QRコードを含む領域に精度よく絞り込むことができ、その後の読み取り処理をやり直す場合が低下するので、読み取り速度が向上する。また、領域の絞り込みの精度が向上することから、情報の読み取り精度も向上する。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
レーザレーダ装置
【課題】広い画角と長い距離の測距の双方を実現することができるレーザレーダ装置を得ることを目的とする。
【解決手段】変調信号でレーザ光を変調し、変調後のレーザ光を測距対象物に向けて走査するレーザ光送信部1と、視野が異なる複数の受信光学系21a,21bを用いて、測距対象物に対するレーザ光の散乱光を受信し、その散乱光を示す電気信号を出力する散乱光受信部2と、散乱光受信部2から出力された電気信号と変調信号の位相差あるいは時間差を検出するとともに、その記電気信号の振幅を検出する距離強度検出装置32とを設け、画像処理装置33が距離強度検出装置32により検出された位相差あるいは時間差に基づいて測距対象物までの距離を算出する。
(もっと読む)
光調整装置、光検出装置、及び距離測定装置
【課題】入射光が著しく強い場合があっても、信号光を正しく検出することができるようにする。
【解決手段】光分離器62によって、反射光パルスを分離し、PD64によって、分離された反射光パルスの一方を検出する。作動制御回路70によって、PD64からの検出信号が閾値以上である場合に、光を遮断するように光調整器68を作動させる。一方、分離された反射光パルスの他方が、延滞機構66を通過して、光調整器68が作動したころに光調整器68に入射される。
(もっと読む)
物体認識装置
【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法
【課題】ユーザの動作をより細かく判定することができる情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法を提供する。
【解決手段】情報処理システムの一構成例は、ユーザの身体の少なくとも一部を乗せることが可能な第1の入力装置と当該第1の入力装置から得られたデータを処理する情報処理装置とを含む。第1の入力装置は、ユーザの身体の少なくとも一部を乗せる第1の台部、および距離データ出力手段を備える。距離データ出力手段は、第1の台部の台面に対して離間する方向に位置する物体までの距離にしたがって決められる距離データを出力する。情報処理装置は、データ取得手段および処理手段を備える。データ取得手段は、距離データ出力手段から出力された距離データを取得する。処理手段は、データ取得手段が取得した距離データに基づいて、所定の処理を行う。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
141 - 160 / 1,291
[ Back to top ]