
Fターム[5J084AA05]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 距離 (1,344)
Fターム[5J084AA05]の下位に属するFターム
変位、厚さ、深さ (53)
Fターム[5J084AA05]に分類される特許
81 - 100 / 1,291
光学式測定装置
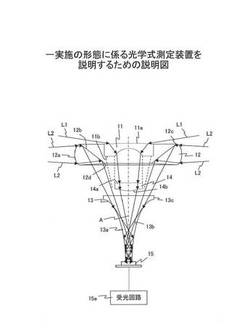
【課題】光学式測定装置において、測定性能を高める。
【解決手段】光学式測定装置1は、第1の受光レンズ11と、この第1の受光レンズ11の周囲に配置された環状の第2の受光レンズ12と、光を検出する光検出器15と、光学素子13と、を具備する。この光学素子13は、第1の受光レンズ11により受光された光、および第2の受光レンズ12により受光された光L1,L2を光検出器15に導光する導波路13aを含む。この導波路13aは、光を反射する反射面13bで形成され、光検出器15に近づくほど断面積が小さくなる。
(もっと読む)
レーザレーダ装置

【課題】レーザレーダ装置以外の他の距離測定装置を備えずに、高い距離測定精度と広い測定可能距離間隔を有するレーザレーダ装置を提供する。
【解決手段】 レーザ光を目標に向けて発振し、目標からの反射光を受信して受信信号に変換する光送受信部10と、あらかじめ設定された測定可能時間間隔に基づき、光送受信部10によるレーザ光の発振から反射光の受信までの時間を測定することでレーザ光の照射点までの距離を示す距離信号を算出すると共に、レーザ光の照射点からのレーザ光の反射光強度を示す強度信号を算出する距離強度算出部20と、距離強度算出部20により算出された距離信号及び強度信号に基づきあらかじめ設定された測定可能時間間隔より狭い測定可能時間間隔を設定する信号処理部30とを備え、距離強度算出部20は信号処理部30により設定された狭い測定可能時間間隔に基づいて距離信号を算出する。
(もっと読む)
交通流計測システム
【課題】
レーザセンサを用いて、測距データから走行車線上の車両の速度と測距された車両の交通流を計測する。
【解決手段】
路面より垂直方向に複数のレイヤを形成する複数のレーザビームを照射し、対象物から、距離データとエコーデータを含む測距データを取得する、複数のレイヤに対応した複数の測距部と、各測距部に対応して、測距部で取得された測距データから車両の位置を検知する検知部と、各測距部により取得された、レイヤ対応の距離データとエコーデータを統合処理して共通の三次元のデータに変換し、かつ共通する距離データから車両の速度を演算するデータ処理部と、検知部で検知された車両に関するデータを表示する表示部を有する。データ処理部は、三次元座標データを用いて同一車両かを判断し、同一車両と判断した場合、車両に同一の固有IDを付与し、同一と判断された車両の速度データ、距離データを同一の固有IDに対応付けてポイントデータDBに記憶する。
(もっと読む)
残置物検出方法及び装置
【課題】監視範囲が広い平面領域であっても、残置物の色合いの影響を受け難く、精度よく残置物を検出することができる残置物検出方法及び装置を提供する。
【解決手段】レーザ光を投光する投光部11と、レーザ光を水平方向に走査させる水平走査手段12と、レーザ光を垂直方向に走査させる垂直走査手段13と、レーザ光の反射光を受光して受光情報d4を発信する受光部14と、受光情報d4から残置物Mの距離を算出する距離演算部15と、投光部11、水平走査手段12及び垂直走査手段13の制御を行う制御部16と、を有するレーザセンサ10を備え、レーザセンサ10は、平面Spに近接した高さHに配置され、レーザセンサ10は、受光情報d4が不連続な計測点Pd又は孤立した計測点Piを含む場合に残置物Mとして検出するように構成されている。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測する。
【解決手段】第1光源からの第1光束によって形成される被検体の位置情報を含む第1干渉信号と、第2光源からの第2光束によって形成される前記被検体の位置情報を含む第2干渉信号と、前記第1光束の波長を走査しながらの前記第1干渉信号と前記第2光束の波長を走査しながらの前記第2干渉信号とに基づいて前記被検体までの絶対距離を算出する処理部とを備え、前記処理部は第1時刻から第2時刻までの時間間隔における前記第1干渉信号の位相と前記第2干渉信号の位相との差分の変化量によって得られる前記被検体の速度によって、前記第1干渉信号および前記第2干渉信号の少なくとも一方に基づいて算出される誤差を有する絶対距離を補正し、誤差が補正された絶対距離を算出する。前記第1時刻および前記第2時刻は前記第1光束の波長と前記第2光束の波長との差分が互いに等しい時刻である。
(もっと読む)
時間振幅変換装置
【課題】複数の時間振幅変換回路を有する場合でも、素子ばらつきの影響を小さくすることのできる時間振幅変換装置を得る。
【解決手段】電圧電流変換素子3a,3bは、増幅器11a,11bの出力電圧に対応した電流を出力する。校正時は、時間振幅変換回路20a,20bに対して、スイッチ2a,2b及びスイッチ5a,5bを切り替えることで、各々基準電流源1を接続し、電圧電流変換素子3a,3bの出力電流値を基準電流源1の電流値に収束させた際の電圧値を容量素子4a,4bの値として記憶する。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】単一の撮像部の画角よりも広い画角を有するとともに距離精度の高い距離画像を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】同一方向に向けて配置される複数のカメラユニット10A〜10Dと、これらの制御および取得される複数の距離画像に対する演算処理を行う演算制御ユニット15とを備える。各カメラユニット10は、対象物へ向けて光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報と前記反射光の強度を示す輝度情報とを画素毎に有する距離画像を取得する撮像部12とを有する。演算制御ユニット15は、第1距離区間探索部、最近接距離区間選択部、第2距離区間探索部、距離情報置換部、2次元位置補正部および距離画像合成部とを有しており、複数の距離画像を合成した際の距離データのばらつきなどを補正する。
(もっと読む)
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
(もっと読む)
環境認識装置および環境認識方法
【課題】水蒸気や排気ガス等の浮遊物を精度よく検出する。
【解決手段】環境認識装置130は、検出領域122内に存在する対象部位の、自車両1に対する相対距離を含む位置情報を取得する位置情報取得部160と、位置情報に基づき、複数の対象部位をグループ化して対象物とするグループ化部162と、対象物の画像における輝度を取得する輝度取得部164と、対象物の画像における輝度のヒストグラムを生成する輝度分布生成部166と、ヒストグラムに対する統計解析により、対象物が浮遊物か否かを判断する浮遊物判断部168と、を備える。
(もっと読む)
車載レーザレーダ装置
【課題】検知すべき範囲内に存在する物標に関する物標情報を効率良く求めることが可能な車載レーザレーダ装置を提供する。
【解決手段】操舵角度センサによってステアリングの操舵角度が取得されると、レーザ光を一括して照射し該レーザ光の反射光を受光した受光信号に基づいて、測距部20が検知実行範囲に存在している検知対象物との距離を表す距離データを測距ユニット毎に求める。そして、制御部30は、測距部20にて求められた距離情報に従って検知対象物に関する情報を生成する。ここで、制御部30は、取得された操舵角度に基づいて距離情報の提供元となる測距IC21の一部を選択することで、検知実行範囲を設定する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
レーダ装置
【課題】走査反射部と偏光分離素子との間の位置関係の調整を不要にすることができるレーダ装置を提供
【解決手段】レーダ装置1は、レーダ波となるパルスレーザ光を照射する光源2と、レーザ光を検出する光検出器3と、光源2から照射されたレーザ光を走査する走査部5と、入射したレーザ光を光検出器3へ導く受光光学系6とを備える。また走査部5は、偏光分離光変角素子11と、再帰性反射素子12と、1/4波長板13とから構成される。そして偏光分離光変角素子11は、レーザ光を透過可能な材料で形成された板形状の基板21と、偏光分離機能を有する構造となるように基板21の面上に形成された偏光分離構造体22とから構成される。そして偏光分離光変角素子11は、基板21に設けられた回転軸23を中心にして振動し、光源2から照射されたレーザ光のうちTM成分を透過させるとともにTE成分を所定走査角度範囲で走査する。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
車両のレーザーレーダーユニット
【課題】レーザー光の透過損失の抑制と部品点数の削減を図ることのできる車両のレーザーレーダーユニットを提供する。
【解決手段】発光部10と受光部11を含むユニット本体13を、ヘッドライト5のハウジング7の内部に設置する。ハウジング7の前方を覆うカバーガラス9に、発光レンズ16と受光レンズ17を一体に形成する。
(もっと読む)
車両用物体検出装置
【課題】電磁波を用いて物体を検出する場合、樹木などの低反射物体が自車の進行方向に対して横方向から移動したと誤判断することを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進行方向(X軸方向)の物体を検出し(S10)、検出された物体が複数あるとき、複数の物体をグルーピングして物体群と認識し(S12)、認識された物体群内の物体同士の距離の合計値σpxが第1の所定値Lpxを超えるか否か判定し(S18)、時刻tから時刻t-nまでの間における1ステップごとの物体群のX軸方向の位置の差の合計値σpが第2の所定値Lpを超えるか否か判定し(S22)、1ステップごとの物体群のY軸方向の幅の合計値σwが第3の所定値Lwを超えるか否か判定し(S26)、少なくとも2つの判定結果が肯定されるとき(S30)、物体群が静止状態にあると判定する(S32)。
(もっと読む)
物体距離検出装置
【課題】物体に対する距離の検出精度を向上させる。
【解決手段】物体距離検出装置10は、レーダ装置11の発信部11aにより電磁波が発信された時刻から受信部11bにより反射波が受信された時刻までの時間差を検出し、時間差に基づき車両から物体までの距離を算出する距離検出部25と、時間差と反射波の受信強度との対応関係を示す2次元直交座標面上での受信強度分布の波形Fにおける受信強度の増加側および減少側での傾きに応じて、受信強度の極大値(推定ピーク電圧Vpeak)を推定する極大値推定部24と、受信強度分布の波形Fにおける受信強度が電圧閾値Vth以上である時間幅(推定パルス幅W)と、極大値(推定ピーク電圧Vpeak)とに基づいて、距離検出部25により算出された距離を補正する距離補正部26とを備える。
(もっと読む)
レーザレーダ装置及びレーザレーダ法
【課題】三次元レーザレーダ装置及び方法において、海面位置に関わらず、確実に検知対象物を検知可能とする。
【解決手段】鉛直方向に連続して配列される複数の点データからなる連続点データ群のうち高さ距離が海上に発生する波の想定最大値を上限として設定される除外閾値以下の連続点データ群に含まれる点データを除外して検知対象物の検知を行う。
(もっと読む)
81 - 100 / 1,291
[ Back to top ]