
Fターム[5J084AA05]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 距離 (1,344)
Fターム[5J084AA05]の下位に属するFターム
変位、厚さ、深さ (53)
Fターム[5J084AA05]に分類される特許
21 - 40 / 1,291
距離計測装置
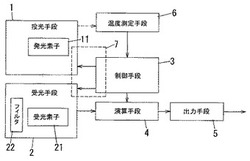
【課題】発光素子の温度変化に対する計測精度の変化を抑制する。
【解決手段】投光手段1は、対象空間に投光する発光素子11を備え、受光手段2は、対象空間からの光を受光する受光素子21を備える。制御手段3は、投光手段1に変調信号を与えて発光素子11から時間経過に伴って強度が変化する変調光を投光させ、変調信号に同期する復調信号を受光手段2に与えて受光素子21の出力から変調光の成分を抽出する。演算手段4は、投光手段1から対象空間に投光された変調光が受光手段2に受光されるまでの時間を計測することにより、対象空間に存在する物体までの距離を算出する。温度測定手段6は、発光素子11の温度を計測し、精度維持手段7は、温度測定手段6が計測した温度が高いほど発光素子11の駆動電流を大きくし、発光素子11の温度変化に対して受光素子21に入射する変調光の変化を抑制する。
(もっと読む)
距離測定装置、および距離測定プログラム

【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
測距センサを備える距離測定装置および距離測定方法
【課題】装置に要求される距離範囲内における測距精度を向上させるとともに、センサの個体バラツキを補正した出力値―距離変換を実現する距離測定装置、距離測定方法、および該距離測定装置を備えた表示装置を提供する。
【解決手段】出力値と距離とが反比例の関係を有するPSDセンサ20において、装置に要求される距離範囲内における最長距離での出力値に応じたオフセット補正を行う調整部21と、該装置に要求される距離範囲における最短距離での出力値に応じてゲイン補正を行う増幅部22を設ける。さらに、中間距離での出力値を測定し、最長距離・最短距離・中間距離の3点での出力値に基づいて、測距センサ固有の特性曲線を求め、PSDセンサ20の出力値を該特性曲線に当てはめることによって、測定対象物までの距離を算出する算出部23を設ける。
(もっと読む)
プラットホームドア用安全装置
【課題】 プラットホームドアの近傍の所定の領域内に存在する物体を従来より正確に検出することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置は、自身に対する物体の距離を受光素子の出力のピークのタイミングに基づいて取得して距離の情報をそれぞれ有する画素の集合である距離画像を生成するタイムオブフライト方式の三次元センサーと、プラットホームドアの近傍の検出領域内に存在する物体を検出する領域内物体検出手段と、領域内物体検出手段によって物体の検出に使用される画素である検出用画素を選定する検出用画素選定手段とを備えており、検出用画素選定手段は、三次元センサーによって生成された距離画像の画素のうち、その距離画像より前に三次元センサーによって生成された距離画像からの距離の変化量が所定の基準を満たす(S103でYES)画素のみを検出用画素として選定する(S104)。
(もっと読む)
レーザートラッカー
【課題】 ターゲットが移動するとき、精度を保ちながら、レーザービームをターゲットに、より高速で追従させるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、角度検出手段4により検出された検出角度および距離測定手段6で測定した測定距離をそれぞれ処理する情報処理手段7とを有する。情報処理手段7は、角度検出手段4で検出された検出角度または距離測定手段6で測定された測定距離の出力であるパルス数をカウントする複数のカウンタを含み、これら複数のカウンタをターゲットの移動速度に応じて切換可能とする。角度検出手段4または距離測定手段6と、情報処理手段7におけるいずれかのカウンタとの間に、前記カウンタに入力するパルスを整数分の1に分周するプリスケーラ8を設けた。
(もっと読む)
トランジットタイム原理に基づいて動作する光学センサ
【課題】仕切りスクリーンの徹底的な検査を可能にする光センサを提供する。
【解決手段】光学センサは、発光パルスを観察領域に放射するための光源と、前記発光パルスのビーム方向を、前記ビーム方向に対して横方向に向けられた回転軸を中心として回転させるための回転装置と、前記観察領域における対象物により反射された光パルスを検知するための検知器と、前記センサの内部を周囲環境から離隔しておくための、前記発光パルス及び前記反射光パルスに対して透明な仕切りスクリーンを含むハウジングと、前記仕切りスクリーンの透光性をテストするためのテスト装置と、前記光源を制御し、且つ、前記検知器により検知された前記光パルスを評価し、且つ、対象物からの距離を決定するための、前記テスト装置と協働する制御及び評価ユニットとを含む。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、駆動制御の複雑化を抑え、三次元的な認識の高速化を図り得る構成を提供する。
【解決手段】レーザレーダ装置1には、複数の受光素子が二次元的に配置されてなる受光センサ20が設けられ、この受光センサ20は、反射部31によって反射光が反射される側に配置され、反射部31によって導かれた反射光を受光領域にて受光する構成をなしている。一方、レーザダイオード10から外部空間に照射されるまでのレーザ光L1の投光経路には、凸状鏡が配置され、偏向部41から外部空間に向かうレーザ光L1を少なくとも中心軸42aの方向に拡がらせている。そして、外部空間からの反射光が偏向部41に入射するときの入射の向きに対応して受光領域での反射光の入射位置が定まるように構成されている。
(もっと読む)
レーザレーダ装置およびレーザレーダ装置による撮像目標選択方法
【課題】背景に輝度の非常に高いクラッタが存在する場合、画像信号からクラッタ成分を除去できない。
【解決手段】一実施形態によれば、レーザ光の送信部11と、受信部12と、複数の撮像素子を有する撮像部13と、目標までの相対距離を演算し受信タイミング信号を出力する測距器14と、この受信タイミング信号の受信期間に重なる第1の露光タイミング信号およびこの受信期間と重ならないタイミングを持つ第2の露光タイミング信号を撮像部13へ与えるタイミング生成部15と、各露光タイミング信号によって撮像された画像信号から複数の画素および画素毎の輝度を対応させた画像データを生成する画像処理部16とを備え、画像処理部16は第1の露光タイミング信号により目標および背景を含む画像を生成し、第2の露光タイミング信号により背景を含む画像を生成し、これらの画像間で輝度の差分を求めるレーザレーダ装置が提供される。
(もっと読む)
光ビームスキャナ及びレーザレーダユニット
【課題】水平方向の広い角度を走査した場合においても垂直方向において変動の少ない光ビームスキャナを提供する。
【解決手段】光源と、前記光源からの光を走査する光スキャナと、前記光源より出射された光ビームを前記光スキャナに入射させるための入力光学系と、を有し、前記光スキャナは、回転軸を中心に回転する回転ミラーであって、前記光源より入射した光ビームを反射するミラーを有しており、前記回転ミラーが前記回転軸を中心に回転することにより、前記光ビームは、前記ミラーのミラー面において異なる位置に照射されるものであって、前記ミラーにおけるミラー面は、前記回転軸に垂直な面に平行な方向において、前記ミラーの一方の側から他方の側に向かって、前記回転軸に平行な方向に対するミラー面傾き角が徐々に増加していることを特徴とする光ビームスキャナを提供することにより上記課題を解決する。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザ光を発生するレーザダイオード10と、レーザダイオード10からレーザ光が発生したときに、検出物体によって反射されるレーザ光の反射光を検出するフォトダイオード20とを備え、さらに、所定の中心軸42aを中心として回動可能に構成された偏向部41を備えるとともに、偏向部41によりレーザ光を空間に向けて偏向させ、且つ反射光をフォトダイオード20に向けて偏向する回動偏向機構40と、回動偏向機構40を回転駆動するモータ50とが設けられている。そして、偏向部41に対するレーザ光の入射方向を相対的に変化させることで、偏向部41からのレーザ光の向きを、中心軸42aの方向に関して変化させる揺動ミラー31と、この揺動ミラー31を制御する制御手段とが設けられている。
(もっと読む)
障害物感知装置及びそれを備えたロボット掃除機
【課題】円錐形ミラーを使用して均一なライン光を形成することによって、全方向に対する障害物の感知が可能な障害物感知装置及びそれを備えるロボット掃除機を提供すること。
【解決手段】障害物感知装置は、発光部、前記発光部を駆動させるための発光駆動部、及び前記発光部の光照射方向に、その頂点が前記発光部に向かうように配置され、前記発光部から発生された光を全方向に照射されるライン光に変換する第1円錐形ミラーを有するライン光発信部と;前記第1円錐形ミラーから照射された後、障害物に反射されて戻ってくる反射光を集光する第2円錐形ミラー、前記第2円錐形ミラーの頂点から所定の距離だけ離間するように配置され、前記反射光を通過させるレンズ、前記レンズを通過した反射光を撮像する撮像部、及び画像処理部を含む反射光受信部と;障害物感知制御部と;を含む。
(もっと読む)
距離マーカ投射装置及びこれを備えた距離測定装置
【課題】所定距離にマーカを投射し、当該所定距離の位置をユーザに視認させることのできる装置を提供する。
【解決手段】面上に光によるマーカを投射する装置であって、光によるマーカを投射するための光源5と、装置本体からマーカを投射する面上の所定位置までの当該面上における距離を記憶する記憶手段7と、面から装置本体までの高さを距離計の出力に基づいて求める手段4と、装置本体からマーカを投射する面上の所定位置までの面上における距離と面から装置本体までの高さとに基づいて、マーカを面上の所定位置に投射するための光源の光軸の角度を算出する演算手段8と、算出された光軸の角度に基づいて光源の光軸の角度を駆動制御し面上の所定位置にマーカを投射させる手段6とを備えた。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、駆動制御の複雑化を抑え、三次元的な認識の高速化を図り得る構成を提供する。
【解決手段】レーザレーダ装置1には、複数の受光素子21が二次元的に配置されてなる受光センサ20が設けられ、この受光センサ20は、ミラー30の上方側において反射部31によって導かれた反射光を受光領域にて受光する構成をなしている。一方、レーザダイオード10から外部空間に照射されるまでのレーザ光L1の投光経路には、凸状鏡71が配置され、偏向部41から外部空間に向かうレーザ光L1を少なくとも中心軸42aの方向に拡がらせている。そして、外部空間からの反射光が偏向部41に入射するときの入射の向きに対応して受光領域での反射光の入射位置が定まるように構成されている。
(もっと読む)
滞留度検出装置及び乗客コンベア
【課題】利用者の足元を見ることで倒れを検知する装置を用いて、利用者の人数(占有率)と歩行速度に基づいて乗降口付近での滞留度を検出する滞留度検出装置、及び、乗客コンベアを得る。
【解決手段】人が滞留していることを検出する走査範囲である検知エリアに水平面状にレーザビームを放射するスキャン型距離センサ7を備え、スキャン型距離センサ7は、乗客の足元を見るように設置され、測定した角度毎の距離を蓄積し、スキャン型距離センサで捉えた検知エリア内のデータから人数と、足の静止時間により算出した歩行速度に基づいて警報や停止等の制御指令を出す。
(もっと読む)
レーザレーダ装置
【課題】カバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、フォトダイオード20の受光面20aの前方側且つ下方側にフィルタ部材90が配置され、このフィルタ部材90は、当該フィルタ部材90の下面90aとのなす角度が小さくなる光ほど透過を抑制する角度依存性を有すると共に、透過板80から受光センサ側に向かう斜め方向の外乱光の透過を抑制するように構成されている。また、上記フィルタ部材90は、上下方向の光については透過するように構成されているため、凹面鏡41によって上方に導かれる正規の反射光(外部空間の物体からの反射光)については、フィルタ部材90を透過する際に抑制されにくくなる。
(もっと読む)
半導体装置の駆動方法
【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
レーダ装置
【課題】発光部で発生する電磁ノイズが受光部に与える影響を抑制した小型化可能なレーダ装置を提供する。
【解決手段】発光部10を、発光部シールド17及び偏光分離素子14が形成する電磁遮蔽空間内に配置する。これにより、発光部10がレーザ光を照射する時に発生させる電磁ノイズが、発光部シールド17の開口部から外部に漏洩することを抑制することができる。つまり、発光部10にて発生し、受光部12に干渉する電磁ノイズの影響を低減することができるため、発光部10と受光部12とを接近配置させて装置を小型化しても、電磁ノイズの影響の少ない受光信号を得ること、ひいては正常な測距を行うことができる。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法
【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置を、レーザビームの走査面を90°以内で変化可能な構成とし、走査面を一方向に角度45°だけ傾けて距離Laを測定し(S3)、次は走査面を逆方向に90°だけ傾けて距離Lbを測定する(S4,S5)。測定距離La,Lbより地面内の第1基準水平方向に対して傾いている角度θcを算出し(S6)角度θc傾ける(S7)。次に走査面を地面と直角にして(S8)距離Ld1,Ld2を夫々測定し(S10,S11)、その測定結果よりレーザビームが基準角度0°にある状態で第2基準水平方向と平行になるまでの角度差θxを算出すると(S12)、本体を地面の方向に角度差θxだけ傾けて走査面を90°回転させる(S14)。
(もっと読む)
21 - 40 / 1,291
[ Back to top ]