
Fターム[5J084AA05]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 距離 (1,344)
Fターム[5J084AA05]の下位に属するFターム
変位、厚さ、深さ (53)
Fターム[5J084AA05]に分類される特許
41 - 60 / 1,291
計測システムおよび計測方法
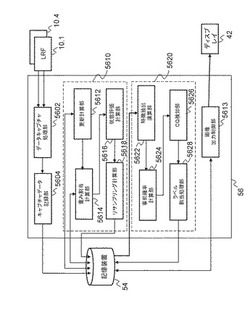
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
レーザースキャンセンサ

【課題】通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
(もっと読む)
無線タグリーダおよび監視システム
【課題】無線タグの方向探知精度がよい無線タグリーダを提供する。
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
(もっと読む)
センサ装置
【課題】対象物の検出範囲がより広いセンサ装置を提供する。
【解決手段】センサ装置1は、センサ装置1の外方向に光を照射する発光素子2及び入光レンズ3と、対象物により反射された光を集光する集光レンズとしての受光レンズ4と、受光レンズ4により集光された光を受光する受光部としてのPSD5aと、を有する。PSD5aの受光面は、凹形状に湾曲している。センサ装置1は、対象物からの反射光を、凹形状に湾曲したPSD5aの受光面により受光するため、対象物の測定範囲をより広くすることができる。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法
【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置11に、本体11aが壁面3に設置された状態で、レーザビームの走査面を90°変化可能なものを使用し、レーザビームの走査面を地面2と直角にした状態で、2つの走査角度θ1,θ2について地面までの距離l1,l2をそれぞれ測定し、その測定結果に基づいて、レーザビームが基準角度0°にある状態で、地面2と平行になるまでの角度差θxを算出する。そして、レーザレーダ装置11の本体11aを地面2の方向に角度差θxだけ傾けて、レーザビームの走査面を90°回転させる。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
信号処理装置
【課題】複数のAD変換器を用いて同一のアナログ信号をAD変換する信号処理装置において、個々のAD変換器の特性のばらつきによって生じる同一のアナログ信号のAD変換精度の低下を抑制する。
【解決手段】クロック生成部58はπ[rad]位相の異なる二つのクロックを生成し、対象信号供給部52は受信信号RSまたは0VのいずれかをAD変換部68の二つのAD変換器72、74に供給する。被補正データ生成部86は、AD変換部68が受信信号RSをAD変換した結果に基づき、読出データRDを生成する。オフセットデータ生成部76は、AD変換部68が基準電圧をAD変換した結果に基づき、AD変換器72、74毎の測定誤差を表すオフセットデータAZ1、AZ2を生成する。補正部100は、読出データRDからオフセットデータAZ1、AZ2分を除去する補正処理を実行し、サンプリングデータSDを生成する。
(もっと読む)
距離測定装置
【課題】車両と測定対象物との間の距離が変化する場合であっても、測定対象物までの距離を高精度に測定することが可能な距離測定装置を提供する。
【解決手段】投光部11より、水平方向に広がる発光領域を有すると共に、上端部、及び下端部が水平となる直線状の端部を有する時間変調した領域光を投光する。そして、測定対象物にて反射した領域光をカメラ12にて撮像し、撮像した画像から上端エッジ、及び下端エッジを抽出し、更に、上端エッジ、及び下端エッジに基づき、三角測量の原理により第1測定距離、及び第2測定距離を求める。そして、測定対象物が車両から遠ざかる場合には、第2測定距離を選択し、測定対象物が車両に近づく場合には第1測定距離を選択する。その結果、測定対象物との間の距離が変化する場合であっても、距離の測定精度を向上させることが可能となる。
(もっと読む)
三次元点群計測方法、三次元点群計測プログラム
【課題】GPS測位演算によりFix解が得られている場合であっても、GPS衛星が元々有する測位誤差要因により測位精度の劣化が生じている。静止測量では長時間の静止によって平均的な解を求めることで精度の劣化を低減できるが、移動体測量では静止ができない、あるいは低速で走れないことが通常であるので、静止測量のように時間平均により精度劣化を抑えることができない。
【解決手段】同じ走行路を複数回走行し、各走行でのレーザ点群の結果において位置が変化しない固定物を基準点とし、基準点が重ね合わさるように点群を伸縮する。この際、位置精度の信頼度で重み付けを行い、その平均的な結果を真値として扱う。また、走行中は常にGPS衛星の状態が変化するので、一点で補正するのではなく一定間隔ごとに固定物を特定して、各走行ごとに位置補正量を算出する。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
光走査装置
【課題】投光タイミングのテーブルがなくても、容易に、光ビームの照射対象領域の各画素に光ビームを照射することができる光走査装置を提供する。
【解決手段】反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、光ビームを照射対象領域内でリサージュ走査可能に形成された光走査部1と、各軸回りの揺動位相を検出する位相検出部2と、反射ミラーに光ビームを投光する光源部3と、第2軸回りの揺動周期Tyの半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、各軸回りの揺動周期Tx,Tyを設定し、Tyの半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、光走査部1を駆動させる走査制御部4と、位相検出部2で検出する揺動位相に基づいて走査線対S,Sの走査時に対応する位相区間だけ、光源部3から光ビームを投光させる光源制御部5と、を備える。
(もっと読む)
車載レーザレーダ装置
【課題】ナンバープレートと車両本体との間にレーザレーダ装置を配置した場合に生じる反射光の影響を抑制可能な車載レーザレーダ装置を提供する。
【解決手段】レーザレーダ装置30は、ナンバープレート12とバンパー14との間にねじ止めされ、照射部42から照射されるレーザ光が筐体外に出射される位置及び受光部44に導かれる反射光を筐体内に取り込む位置が、ナンバープレート12の車幅方向の端部より中央側に奥まった位置に配されている。ここで特に、照射部42から照射されるレーザ光のうちナンバープレート12及びバンパー14の少なくとも一方によって反射されるレーザ光が受光部44にて受光されないように、照射部42による照射範囲AI及び受光部44による受光範囲ARが定められている。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
データ解析装置、レーダ装置、およびデータ解析方法
【課題】サンプリング値に対するデータ解析を行うデータ解析装置において、サンプリング値を時系列に従って並べた時系列データにおける複数のピーク値の位置を正確に推定できるようにする。
【解決手段】レーダ装置においては、複数のサンプリング値を時系列に従って並べた時系列データにおいてサンプリング値の極大値および極小値を検出し(S10)、極小値として得られたサンプリング値以上の値を基準値として、この基準値よりも大きな値を有するサンプリング値のうちの時系列データにおいて互いに隣接するものをそれぞれグループとし、これらのグループ毎に入力信号が最大となるピーク位置を推定する(S20)。このようなレーダ装置によれば、極小値を変更することなく基準値を設定し、ピーク位置を推定することができるので、各ピーク位置を正確に推定することができる。従って、精度よく物標までの距離を検出することができる。
(もっと読む)
光学式測距装置および電子機器
【課題】高耐熱かつ高精度の光学式測距装置を提供する。
【解決手段】発光レンズ5および受光レンズ6を保持した、金属からなるレンズフレーム11を遮光性樹脂からなる2次モールド9および3次モールド10の間に保持する。レンズフレーム11は、表面および裏面に凹凸構造11bを有している。発光レンズ5および受光レンズ6とレンズフレーム11との密着力が大幅に向上するので、発光レンズ5および受光レンズ6とレンズフレーム11との滑りを防止することができる。
(もっと読む)
距離,速度測定装置
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
自動水栓
【課題】 使用者の用途に応じた吐水形態の切り替えを可能とする自動水栓を提供する。
【解決手段】 給水経路から給水された水を吐出する吐水口と、前記給水経路に接続された電磁弁と、前記電磁弁を駆動することで吐水と止水とを切り替える制御部と、前記吐水口近傍の異なる位置に設けられた少なくとも2つの検知センサと、を備え、前記検知センサの検知領域が検知センサ近傍において重なっていない自動水栓において、前記制御部は、いずれかの検知センサの検知レベルが所定の吐水検知レベル以上であると吐水を行うと共に、一方のセンサの検知レベルが吐水検知レベルより高く設定された近接検知レベル以上であると、他方のセンサの検知レベルに基づいて吐水と止水の切り替えを行う。
(もっと読む)
41 - 60 / 1,291
[ Back to top ]