
Fターム[5J084BA05]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 複数の光源を有するもの (264)
Fターム[5J084BA05]の下位に属するFターム
1次元配列 (16)
2次元配列 (27)
それぞれの光源の特性が異なるもの (37)
Fターム[5J084BA05]に分類される特許
1 - 20 / 184
レーザレーダシステム、レーザ測距装置および制御装置
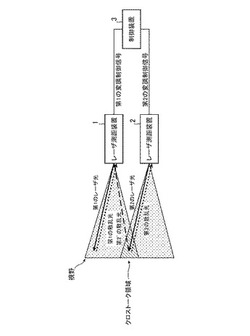
【課題】広視野な受信系においてクロストークによる誤りを回避する。
【解決手段】レーザ測距装置1,2は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(レーザ装置11、変調器12およびスキャナ13)と、対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ15および受光器16)と、電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出装置17とを備え、制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる。
(もっと読む)
レーザレーダ装置

【課題】装置内における伝送効率を自動で校正することのできるレーザレーダ装置を得る。
【解決手段】光検出器8は、送信光学系7a、7bからの出射光のパワーに相当するモニタ信号を出力する。光検出器10は、測定媒質100を通過した光を受信し、その値に対応した受信信号を出力する。信号処理装置12は、送信光学系7a、7bからの出射光に対する光検出器10の結合効率を示す値に基づいて、吸収波長の大きい光の振幅または電力と吸収波長の小さい光の振幅または電力とを補正し、その差異から測定媒質100に対する光学的厚みを測定する。
(もっと読む)
光走査装置及びレーザレーダ装置
【課題】精度高く正確に走査光の走査量を測定することができるとともに、小型化が可能で、かつ安価な光走査装置、及びレーザレーダ装置を提供する。
【解決手段】 光学素子1と、ホルダ2と、ホルダ2を移動可能に支持する支持手段3,5と、ホルダ2を光学素子1の光軸に垂直な方向に移動させる駆動手段4,6と、光学素子1を透過する第1の波長の光を発光する第1発光素子10、及び光学素子1を透過しない第2の波長の光を発光する第2発光素子11からなる発光素子を備え、
ホルダ2に、第2の波長の光を透過しない構造体からなるパターン9が形成され、
第2の発光波長を感知するセンサ12をさらに備え、
センサ12は、反射された光を受光可能な位置に配置され、かつ第1発光素子10と、第2発光素子11と、センサ12とが、相対的に固定された位置に配置されていることを特徴とする光走査装置、及びレーザレーダ装置。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
距離計測装置
【課題】発光素子の温度変化に対する計測精度の変化を抑制する。
【解決手段】投光手段1は、対象空間に投光する発光素子11を備え、受光手段2は、対象空間からの光を受光する受光素子21を備える。制御手段3は、投光手段1に変調信号を与えて発光素子11から時間経過に伴って強度が変化する変調光を投光させ、変調信号に同期する復調信号を受光手段2に与えて受光素子21の出力から変調光の成分を抽出する。演算手段4は、投光手段1から対象空間に投光された変調光が受光手段2に受光されるまでの時間を計測することにより、対象空間に存在する物体までの距離を算出する。温度測定手段6は、発光素子11の温度を計測し、精度維持手段7は、温度測定手段6が計測した温度が高いほど発光素子11の駆動電流を大きくし、発光素子11の温度変化に対して受光素子21に入射する変調光の変化を抑制する。
(もっと読む)
プラットホームドア用安全装置
【課題】 プラットホームドアの近傍の所定の領域内に存在する物体を従来より正確に検出することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置は、自身に対する物体の距離を受光素子の出力のピークのタイミングに基づいて取得して距離の情報をそれぞれ有する画素の集合である距離画像を生成するタイムオブフライト方式の三次元センサーと、プラットホームドアの近傍の検出領域内に存在する物体を検出する領域内物体検出手段と、領域内物体検出手段によって物体の検出に使用される画素である検出用画素を選定する検出用画素選定手段とを備えており、検出用画素選定手段は、三次元センサーによって生成された距離画像の画素のうち、その距離画像より前に三次元センサーによって生成された距離画像からの距離の変化量が所定の基準を満たす(S103でYES)画素のみを検出用画素として選定する(S104)。
(もっと読む)
自己位置推定装置、方法、及びプログラム
【課題】自己位置の推定精度を向上させる。
【解決手段】自己位置推定装置1は、移動体の複数の視点から取得される環境データに基づいて視点毎に二次元マップを作成するマップ作成部2と、複数の二次元マップの中から直線部が比較的多い二次元マップを抽出するマップ抽出部3と、抽出された二次元マップと、当該抽出された二次元マップと同一の視点から取得される環境データとの照合結果に基づいて、移動体の自己位置を推定する位置推定部4とを備える。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
車載レーザレーダ装置
【課題】ナンバープレートと車両本体との間にレーザレーダ装置を配置した場合に生じる反射光の影響を抑制可能な車載レーザレーダ装置を提供する。
【解決手段】レーザレーダ装置30は、ナンバープレート12とバンパー14との間にねじ止めされ、照射部42から照射されるレーザ光が筐体外に出射される位置及び受光部44に導かれる反射光を筐体内に取り込む位置が、ナンバープレート12の車幅方向の端部より中央側に奥まった位置に配されている。ここで特に、照射部42から照射されるレーザ光のうちナンバープレート12及びバンパー14の少なくとも一方によって反射されるレーザ光が受光部44にて受光されないように、照射部42による照射範囲AI及び受光部44による受光範囲ARが定められている。
(もっと読む)
位置確認システム
【課題】利用者による特別な動作が無くても利用者の位置を確認することが可能な位置確認システムを提供する。
【解決手段】位置確認システム1Aにおいて、発光装置20は、当該発光装置に固有の信号が含まれるように変調された光を発光し、受光装置30Aは、反射装置で反射した光を受光したときに、受光した光に含まれる信号を制御装置40へ出力し、制御装置40は、発光装置20に固有の信号と当該発光装置20の設置場所とが関連付けて記憶された記憶部41と、受光装置30Aから出力された信号を用いて記憶部41を参照することによって、信号に関連付けられた設置場所を記憶部41から読み出す位置確認部42と、を備える。
(もっと読む)
レーザレーダシステム,及び取付方法
【課題】自動車に取り付けられるレーザレーダにおいて、モレ光の影響でゴーストが物体として検出されることの低減。
【解決手段】レーザレーダシステム1は、レーザレーダ10と、処理済部材80とを備える。レーザレーダ10は、レンズを含む光学素子を介して、規定角度範囲LA,RAに渡ってレーザ光を照射し、反射されたレーザ光を受光することで物体を検知する。処理済部材80は、レーザレーダ10が取り付けられる自動車における外表面のうち、モレ範囲LE,REと重複する外表面の範囲に反射率を低減させる反射率低減処理が施された部材である。モレ範囲LE,REとは、規定角度範囲LA,RAへのレーザ光の照射に伴って、当該規定角度範囲LA,RAに照射されるレーザ光の強度よりも強度が小さいレーザ光が照射される範囲であり、規定角度範囲LA,RAに隣接する範囲である。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
レーザレーダ装置
【課題】 スキャン周期を必要に応じて制御可能なレーザレーダ装置を提供する。
【解決手段】 近距離ターゲットが有るか否かを判断し(S150)、近距離ターゲットがある場合(S150:YES)、測距時間要因を変更設定する(S160)。具体的には、通常時よりも、レーザ光の出射間隔である「発光間隔」を短くし、また、同一探査領域からの反射光の「受光回数」を減らすようにする。そして、設定された測距時間要因で測距を行い(S100)、ターゲットの位置を取得し(S110)、ターゲットの速度を算出して(S120)、データを更新する(S130)。つまり、非可動の配光器を用いて探査領域へ並行してレーザ光を照射するようにし、レーザ光の出射間隔及び反射光の受光回数を変更することで、探査に要する時間を変更する。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間で受光し、第2照射タイミングで照射された前記照射光の前記反射光を第2受光期間でそれぞれ受光するとともに、前記第1照射タイミング又は前記第2照射タイミングに対して予め決められた第3受光期間で受光し、前記演算部は、前記第1受光期間〜前記第3受光期間で得られた光電子数とを用いて前記測距対象までの距離を算出し、前記第1受光期間及び前記第2受光期間は前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含み、前記第3受光期間は前記固体撮像装置に到達する前記反射光の強度が一定となる時間である。
(もっと読む)
状態判定装置、状態判定方法およびプログラム
【課題】監視エリアの様々な状態を容易に確認可能とする。
【解決手段】不特定多数の人(移動体)が往来する環境下での、通常状態での人の移動速度VRおよび移動方向θRを予め求めておく。そして、当該環境下で、人の移動速度Vおよび移動方向θを求め、これら移動速度Vおよび移動方向θと、通常状態において予め求めた移動速度VRおよび移動方向θRとを比較し、比較結果に基づき当該環境の状態が異常状態であるか否かを判定する。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、検出光が放射状に出射された検出対象空間に位置する対象物体で反射した検出光を受光する。受光部13には、受光素子130の受光面131を部分的に覆うシールド部材14が設けられている。シールド部材14において、入射部140は、受光面131に対する法線方向から一方側および反対側に傾くに伴って幅広になっている。従って、受光素子130での受光強度は、受光面131に対する法線方向から入射した検出光と、受光面131に対する法線方向から傾いた斜め方向から入射した検出光とにおいて差が小さい。
(もっと読む)
プラットホームドア用安全装置
【課題】 従来より耐久性を向上することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置30は、プラットホームドア20に設置されてプラットホームドア20の近傍に存在する物体を検出するタイムオブフライト方式の三次元センサ40と、入射光に対して反射光を減衰する光減衰部50とを備えており、三次元センサ40は、所定の範囲に赤外光を発する複数のLEDと、複数のLEDから発せられて物体によって反射された赤外光を受ける複数の受光素子とを備えており、複数の受光素子は、前記所定の範囲のうち各々の担当の範囲からの光を受け、複数のLEDは、複数の受光素子の各々の担当の範囲に光を同時に発し、光減衰部50は、複数のLEDから発せられた赤外光の少なくとも一部が入射する位置に配置されていることを特徴とする。
(もっと読む)
植生検出装置及び植生検出方法
【課題】座標変換などのシステムの統合を容易にし、またコストや物理的サイズも抑え、夜間など暗い環境にも対応する植生検出装置を提供する。
【解決手段】植物の葉で吸収されにくい波長の第1の3次元レーザレーダ21と、吸収されやすい波長の第2の3次元レーザレーダ22とから出力された計測値(距離、角度、反射率)を取得する第1及び第2の3次元点群取得部11及び12と、第1の3次元レーザレーダ21による第1の計測点と、その第1の計測点に最も近い第2の3次元レーザレーダ22による第2の計測点とを対応づける対応付け部16と、対応づけられた第1及び第2の計測点について、第1の計測点の反射率と第2の計測点の反射率との比を求める反射率比算出部15と、反射率の比に基づいて互いに対応づけられた計測点が植物か否かを判定する判定部17とを備えている。
(もっと読む)
1 - 20 / 184
[ Back to top ]