
Fターム[5J084BA11]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 可動光源、投光方向可変に関するもの (415)
Fターム[5J084BA11]に分類される特許
21 - 40 / 415
レーザ測定装置
【課題】レーザ光が規定方向に照射される回動位置を正確に「基準位置」として設定することができ、その基準位置に基づいて検出物体の相対位置をより精度高く算出し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置1は、検出される距離値が所定の距離条件を満たし、且つ検出される受光量が所定の受光量条件を満たす回動位置を「基準位置」として検出する「基準位置検出手段」と、「基準位置検出手段」によって検出された「基準位置」を基準とする偏向部41の相対的な回動位置を検出する「相対位置検出手段」と、フォトダイオード20(受光手段)によって反射光が受光されたとき、「相対位置検出手段」による相対的な回動位置の検出結果に基づいて検出物体の方向を検出する「方向検出手段」とが設けられている。
(もっと読む)
光走査装置及びこれを用いた光測距装置

【課題】光走査部の共振周波数が製造バラツキや温度変化等によって変動しても、光走査部による走査軌跡を変更することなく、光走査部に出力される駆動信号の周波数を上記共振周波数に近づけることのできる光走査装置及びこれを用いた光測距装置を提供する。
【解決手段】光測距装置1は、光反射面を有する可動部が揺動することで該光反射面に入射される光を対象領域内でリサージュ走査する光走査部3、光走査部3に第1、第2駆動信号を出力して可動部を揺動駆動する駆動部5、光反射面に向かってパルス光を出射する光源部7、パルス光の反射光を受光する受光部9及びパルス光を反射した物体までの距離を計測する測距部11を備える。駆動部5は、第1駆動信号の周波数及び第2駆動信号の周波数をこれらの周波数比を維持しつつ変更可能に構成されている。
(もっと読む)
レーザレーダ装置
【課題】レーザ光が透過板で反射して生じる内部反射光に起因する誤検出を効果的に防止し得るレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1では、ケース3内に回動反射機構40が収容されており、このケース3には、回動反射機構40に設けられた凹面鏡41からのレーザ光の走査経路上を囲う構成で透過板5が配置されている。更に、反射光が凹面鏡41からフォトダイオード20に至るまでに通る反射光経路を当該反射光経路の外から囲う構成で抑制カバー80が配置されている。そして、抑制カバー80は、凹面鏡41から空間に向けて偏向されたレーザ光の一部が透過板5にて反射する内部反射光を拡散反射させて低減するように構成されている。
(もっと読む)
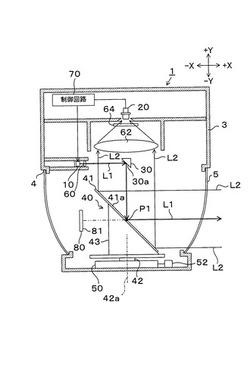
レーザレーダ装置
【課題】回動可能な偏向部をレーザ光投射時及び反射光検出時に兼用するレーザレーダ装置において、投光時のレーザ光の経路と受光時の反射光の経路を適切に確保することができ、且つ投光時のノイズ光の発生を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1は、レーザ光L1の投光経路上且つ反射光L2の受光経路上においてミラー30が設けられている。このミラー30には、凹面鏡41にて偏向された反射光L2をフォトダイオード20に向けて反射する第1反射部31と、レーザダイオード10からのレーザ光L1を凹面鏡41に向けて反射する第2反射部32とが形成され、第1反射部31の第1反射面31aと第2反射部32の第2反射面32aは、傾斜状態又は湾曲状態が異なるように構成されている。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】投射窓によるレーザ光の光学特性の劣化を抑制可能なビーム照射装置およびレーザレーダを提供する。
【解決手段】ビーム照射装置は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、ミラーアクチュエータ23のミラー150により反射されたレーザ光が透過する投射窓50と、を備える。投射窓50には、表面反射を抑制するための反射防止膜51が配され、反射防止膜51は、少なくともレーザ光の走査範囲に対応するレーザ光の入射角度(0〜20°)の範囲において、反射率が下限値を維持するような角度依存性を有する。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置において、光源の寿命を低下させることなく、レーンマークおよび前方障害物を精度良く検出する。
【解決手段】レーザレーダ装置は、光ビームを発生させる光源と、前記光ビームを偏向させて、車両の進行方向を中心として前記車両の車幅方向に対して設けられた第1の走査角度範囲において走査する第1光走査部と、前記光ビームを偏向させて、前記車幅方向に対して左右に分割されている第2の走査角度範囲において走査する第2光走査部と、前記第1の走査角度範囲内に存在する障害物によって反射された前記光ビームの反射光を受光して、前記障害物を検出する障害物検出部と、前記第2の走査角度範囲内に存在するレーンマークによって反射された前記光ビームの反射光を受光して、前記レーンマークを検出するレーンマーク検出部と、を備える。
(もっと読む)
レーザレーダ装置
【課題】高速処理が可能なレーザレーダ装置を提供できる。
【解決手段】前方に出射したレーザ光に対して反射光の光量が所定値より小さい領域においては光走査速度を標準値より下げて検出を行い、反射光の光量が所定値より大きい領域においては光走査速度を標準値より上げて検出を行う。領域においては光走査速度が標準値より遅くなっているため、ある同じ角度範囲幅においての反射光の積算回数を、角度分解能を下げることなく基準回数より増加させることができる。これにより、歩行者など反射光量の小さい物体を感度よく検出することができる。一方、反射光の光量が大きい領域においては、光走査速度が標準値より速くし、ある同じ角度範囲幅においてのパルスの積算回数は基準回数より少なくするが、元々十分な反射光量が得られているため問題なく正確な距離・方向の検出は可能である。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の多角形の面積を非接触で測定することの可能なレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の多角形の面積を非接触で測定するレーザレーダ方式の測距装置である。2次元スキャナ3は、レーザダイオード2からのレーザ光を偏向させて測定対象物10上の任意の多角形の頂点A,B,…を照射する。フォトダイオード6は、各頂点A,B,…で反射したレーザ光を受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号と2次元スキャナ3の動作情報を用いて多角形の面積を算出する。2次元スキャナ3は、測定対象となる多角形をレーザ光の2次元走査により描画表示する。
(もっと読む)
光走査装置、レーザレーダ装置及び光走査方法
【課題】複数の走査角および空間分解能を設定することができる光走査装置を、小型かつ簡便な構成で実現する。
【解決手段】光走査装置12は、複数の光源で構成される光源装置20と、光源数に対応した数の光偏向素子から構成される光偏向素子22と、各光偏向素子に個別に対応した、異なる拡大率を有する走査角およびビーム広がり角の複数の拡大レンズ系26とから構成されている。いずれかの拡大レンズ系と、これに対応した光偏向素子及び光源を選択することにより、複数の走査角および空間分解能を設定することができる。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】第1の視点から得た測定対象物の三次元点群位置データに基づき三次元モデルを形成し、この三次元モデル上において、第2の視点から見た測定対象物の撮影画像との共通部分を指定する。次いで、上記共通部分において、対応点となる特徴点を算出し、対応点を指定する。そして、この指定された対応点に基づいて、第1の視点から得た三次元点群位置データを扱うための座標系に関連付けた第2の視点の三次元位置を算出する。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の2点間距離を非接触で測定することができるレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の2点A,B間距離LABを非接触で測定するレーザレーダ方式の測距装置である。レーザダイオード2はレーザ光を射出し、スキャナ3はレーザダイオード2からのレーザ光を偏向させて2点A,Bに対して順に照射する。フォトダイオード6は、2点A,Bで反射したレーザ光をそれぞれ受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号とスキャナ3の動作情報を用いて2点A,B間距離LABを算出する。スキャナ3は、2点A,Bを含む直線上での1次元走査が可能であり、2点A,B間の線分ABをレーザ光の1次元走査により描画表示する。
(もっと読む)
ビーム照射装置
【課題】可動部が動作しときの配線部材の動きが単純になり、配線部材から可動部に掛かる負荷のバラつきを抑制でき、且つ、配線部材の断線を抑制することが可能なビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、支軸111、112の周りに回動可能なミラーホルダ110と、ミラーホルダ110に装着されたミラー113と、ミラーホルダ110に配されたコイル114とを有する。第1FPC10は、コイル114に電気的に接続されるとともに、可撓性を有する。、第1FPC10は、コイル114と可動枠120とを橋架するようにして、可動枠120に固着される。
(もっと読む)
搬送車両および運転支援装置
【課題】パレットに対して搬送車両を進行させるべき方向を運転者が容易に認識できる搬送車両および運転支援装置を提供すること。
【解決手段】周囲状況画面では、搬送車両1の周囲状況として、第1レーダレーダ5A(又は、第2レーダレーダ5B)の走査により障害物が検出されなかった障害物非検出エリアAと、障害物の影となって測定が行えない検知不可能エリアBとが、それぞれ異なる表示態様で表示される。例えば、障害物非検出エリアAと、検知不可能エリアBとが、運転者が区別可能に、別々の色で表示される。これにより、搬送車両1がパレット100の架台部100aの下に進入する場合に、搬送車両1をパレット100の架台部100aの下に進入させることが可能な進入経路を、運転者が容易に見いだすことができるので、パレット100に対して搬送車両1を進行させるべき方向を運転者が容易に認識できる。
(もっと読む)
測定装置
【課題】安価で簡便に点群データを取得できる測定装置を提供する。
【解決手段】測定対象物に対してパルス測距光10を照射する光源部2と、投光光学系3と、前記測定対象物からの反射パルス測距光10′を受光する為の受光光学系4と、受光された反射パルス測距光を検出する為の1つの光検出部を有する受光部6と、該受光部からの検出信号に基づきパルス測距光の発光から反射パルス測距光の受光迄の時間を測定して距離を測定する制御部7とを具備する測定装置に於いて、前記光源部は、前記投光光学系の光軸に対して既知の関係で配列された複数の発光源8と、該発光源を所定の時間間隔で発光させる駆動部9とを有し、前記受光部は、前記発光源と共役の位置に配列され、反射パルス測距光を前記光検出部に導く縮小光学系11,13を有し、前記制御部は、受光素子12からの受光信号24を前記発光源に対応させて判別し、受光信号毎に測距を行う構成した。
(もっと読む)
物体検出装置
【課題】監視領域がレーザレーダの近辺から遠方まで広く分布する場合であっても、監視領域の物体を正確に検出すること。
【解決手段】走査光LB1の主走査方向Xにおけるレーザレーダヘッド5からの距離が遠い監視領域では、反射光LB2の拡散の度合いが大きいので、反射光LB2の強度が弱くなる。そこで、主走査方向Xにおけるレーザレーダヘッド5からの距離が遠い監視領域では、レーザ投光器1のドライバ回路1aのパルス信号周期を長くする。すると、光ファイバ増幅器1bの光ファイバ1dに励起原子が蓄積される周期が長くなる。これにより、種光がレーザダイオード1cから入射されることにより光ファイバ1dのコアの電子が励起されて蓄積される励起エネルギが大きくなり、種光の増幅のゲインが大きくなって、光ファイバ1dから出力されるレーザ光LBの強度が強くなる。よって、走査光LB1の強度が強くなり、反射光LB2の強度も強くなる。
(もっと読む)
レーザ距離測定装置
【課題】従来のレーザ距離測定装置では、測定性能や装置構造のさらなる改善が望まれていた。
【解決手段】送信レーザ光LTと目標で反射した受信レーザ光LRの時間的なずれに基づいて目標までの距離を測定するレーザ距離測定装置F1であって、送信レーザ光LTの発光部1と、受信レーザ光LRの受光部2と、垂直軸回りに回転駆動される回転体3を備えると共に、回転体3に、回転しながら発光部1からの送信レーザ光LTを外部の所定角度範囲に走査する送信光学系4と、回転しながら外部の所定角度範囲からの受信レーザ光LRを受光部2に導く受信光学系5を設けたことにより、一つの回転体3に、送信光学系4及び受信光学系5をコンパクトに搭載すると共に、全方位分の送信レーザ光LTを有効に使用するようにして、走査性能や測定性能のさらなる向上、及び装置構造のさらなる小型軽量化を実現した。
(もっと読む)
位置計測方法、位置計測システム、及びプログラム
【課題】トータルステーションと比して簡易な装置を用いて、リアルタイムで被計測物の特徴点の位置を計測できる位置計測方法、及び位置計測システムを提供する。
【解決手段】円柱体であるターゲット30の中心位置を計測する位置計測方法であって、レーザ光をターゲット30上で走査してターゲット30上の複数の計測点までの距離を計測するLRF20から、ターゲット30上における複数の計測点の位置情報を取得するステップと、ターゲット30上における複数の計測点の位置情報と、既知情報であるターゲット30の円周面30B上の円弧部及び中心位置の情報とに基づいて、ターゲット30の中心位置を推定するステップと、を備える。
(もっと読む)
距離測定装置、距離測定方法、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、簡素な構成で距離と輝度とを検出できる技術を提供する。
【解決手段】レーダ装置は、レーザ光を射出する発光部と、発光部からのレーザ光が物体に反射されることにより得られる反射光を受光し、この光量に応じた出力をする受光部と、を備えている。そして、レーダ装置は、レーダ処理にて、受光部による出力に基づいてレーザ光を反射した物体までの距離を演算し(S220)、また、受光部による出力に基づいて輝度を演算する(S230)。このレーダ装置によれば、物体までの距離だけでなく、受光部が受光することができる領域における輝度についても、レーダ装置の構成(ハードウェア)を利用して検出することができる。よって、簡素な構成で距離と輝度とを検出することができる。
(もっと読む)
ビーム照射装置
【課題】光検出器からの信号に基づいて検出されたサーボ光の受光位置と理想の受光位置との差分に、迷光や電気的ノイズ等による外乱成分が含まれる場合にも、適正に、レーザ光を目標領域において走査させ得るビーム照射装置を提供する。
【解決手段】マイコン7は、PSD315からの検出信号に基づいて取得されたサーボ光の受光位置と、理想の受光位置との差分を示す差分信号に基づいて、レーザ光が目標領域上の目標軌道を追従するよう、ミラーアクチュエータ100を制御する。また、マイコン7は、差分信号に外乱成分が含まれるエラー期間を検出し、検出したエラー期間において、差分信号に応じて前記レーザ光を前記目標軌道に追従させる制御を停止させる。
(もっと読む)
ビーム照射装置
【課題】ミラーを原点位置に迅速かつ円滑に位置づけることができるビーム照射装置を提供する。
【解決手段】マイコン7は、PSD315上におけるサーボ光の受光位置と原点位置とを繋ぐ軌道を設定し、サーボ光の受光位置がこの軌道を追従して原点位置に至るよう、ミラーアクチュエータ100を制御する。具体的には、マイコン7は、前記軌道上に、制御タイミング毎の理想の受光位置を設定し、各制御タイミングにおけるサーボ光の受光位置と理想の受光位置との差分に基づいて、サーボ光が前記軌道を追従するように、ミラーアクチュエータ100を制御する。
(もっと読む)
21 - 40 / 415
[ Back to top ]