
国際特許分類[B60L15/40]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 電気的推進車両の推進,例.牽引モータの速度,の所定の駆動を行うための制御をする手段,回路または装置;定置場所,車両の他の場所または同じ列車の他の車両からの遠隔操作のための電気的推進車両における制御装置のためのもの (2,227) | 定置場所からの遠隔操作のための車両における制御装置のためのもの (284)
国際特許分類[B60L15/40]に分類される特許
51 - 60 / 284
トランスポンダ装置及び車両制御装置
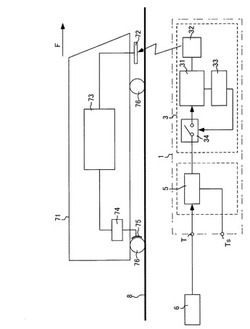
【課題】内部回路の動作状態を監視し、外部に知らせることができ、しかも、符号処理器を必要としない小型、かつ、安価なトランスポンダ装置及びそれを用いた車両制御装置を提供すること。
【解決手段】電文設定送信部31と、監視部5とを含むトラスポンダ装置であって、電文設定送信部31は、電源供給部6から電源の供給を受けて動作し、予め準備された電文信号を送信する。監視部5は、電源供給部6から電文設定送信部31に供給される電流を監視し、その監視結果を出力端子Tsから外部に出力する。
(もっと読む)
定位置停止装置

【課題】列車を目標停止位置で確実に停止させる。
【解決手段】定位置停止装置10は、路線データベース13の路線データ13A、列車の速度を計測する速度センサ101からの速度情報101a、地上子102からの受信情報102aに基づき、列車の現在位置から目標停止位置までの停止速度パターン14Aを作成する停止速度パターン作成部14と、列車に設置された滑走検知装置104がその列車の滑走を検知すると、停止速度パターン14Aの速度より低速な滑走停止速度パターン15Aを作成する滑走停止速度パターン作成部15と、滑走停止速度パターン15Aまたは停止速度パターン14Aに従って列車の速度を制御する速度制御部12とを備えた。
(もっと読む)
トランスポンダ装置及び車両制御装置
【課題】現示条件等の選択用電源のみで動作し得、別途電源供給回路及び電力波受信回路が不要で、小型、低コストのトランスポンダ装置及びそれを用いた車両制御装置を提供すること。
【解決手段】電源供給部1は、個別電源供給線11〜13と、単方向性回路素子(D1〜D3)とを含んでいる。個別電源供給線11〜13のそれぞれは、一端に電源供給端T1〜T3を有し、他端が電文格納部21〜23のそれぞれと対応関係をもって個別的に接続されている。単方向性回路素子(D1〜D3)のそれぞれは、互いに方向性を合わせて、一端が個別電源供給線11〜13と対応関係をもって個別的に接続され、他端が共通電源線14に共通に接続されている。電文送信部3は、共通電源線14から電源供給を受けて動作し、電文格納部21〜23から供給された電文信号Sg〜Srを送信する。
(もっと読む)
移動体制御システム
【課題】速度発電機やGPS、加速度センサ、ドップラーレーダーなどの位置推定手法は、列車状態や周辺環境などによって推定精度が常に変化するため、走行前に適切な誤差を想定して安全余裕距離として設定することが難しく、過剰な安全余裕距離が設定され、運行密度が低下する可能性がある。
【解決手段】車上装置1は、位置推定装置11と位置精度評価装置12と送信装置14と受信装置15と停止目標情報を元に列車の走行速度を制御する速度制御装置13とを有し、地上装置2は、各列車からの列車位置情報及び位置精度情報を受信する受信装置21と受信情報を元に各列車の在線確率を算出する在線確率算出装置22と在線確率情報を元に停止目標を算出する停止目標算出装置23と停止目標を送信する送信装置24とを有し、位置推定精度が走行中に変化した場合、その変化に追従して最適な停止目標を算出する。
(もっと読む)
走行制御支援方法及び走行制御支援装置
【課題】安全性を低下させることなく、コストをかけずに、警報時間の短縮効果が得られる走行制御を支援する。
【解決手段】列車2が踏切3に接近すると、車上装置21は、自らの列車2の位置・速度情報を所定の間隔で踏切制御装置31に送信する。踏切制御装置31は、車上装置21から受信する列車の位置及び速度に基づいて踏切到達予測時間及びブレーキパターン到達予測時間を算出する。また、踏切制御装置31は、予め記憶する設計警報時間と、算出される踏切到達予測時間を比較するとともに、予め記憶する踏切遮断完了時間と、算出される踏切遮断完了時間を比較し、所定の条件を満たす場合には警報を開始するように指示する。踏切制御装置31が、警報開始後に列車2を加速させる走行制御パターンを算出し、車上装置21に送信する。そして、車上装置21は、算出される走行制御パターンを乗務員に提示し、乗務員による走行制御を支援する。
(もっと読む)
列車制御車上装置
【課題】帰還発振回路を用いずに地上子の共振周波数の誤検知を防止し、共振周波数検知精度を向上させる。
【解決手段】列車制御車上装置は、信号生成部12と、車上子11と、信号検出部13とを備える。信号生成部12は、ある特定の時間周期で、共振器の共振周波数を含む許容変動範囲で周波数をスイープさせて周波数スイープ信号を生成する。車上子11は、周波数スイープ信号を受ける第1コイル11aと、第1コイルとの電磁結合により信号を得る第2コイル11bを有し、地上子15と電磁結合したとき、第1コイル11aで受けた周波数スイープ信号のうち共振器の共振周波数に応じた信号成分を、地上子15を介して第2コイル11bで得る。信号検出部13は、車上子11の前記第2コイル11bで得られた信号を、ある特定の時間周期と等しい時間周期でフーリエ変換し、フーリエ変換後の信号に基づき、地上子15の検出処理を行う。
(もっと読む)
列車制御システム
【課題】車上制御装置と拠点装置とが無線通信を用いて効率よく情報を授受できる列車制御システムを提供する。
【解決手段】列車制御システムは、列車に搭載した車上制御装置21と地上に設置した拠点装置12Aを有する。車上制御装置の第1の送信手段は列車状態情報に列車識別情報を付加した列車側情報をブロードキャストし、第1の受信手段は制御情報を受信する。列車制御手段は、列車識別情報が付与された制御情報に基づいて列車を制御する。拠点装置は、第2の受信手段と記憶手段と生成手段と第2の送信手段とを有する。第2の受信手段は、列車からブロードキャストされる情報を複数の無線通信局13A1〜BXで受信する。記憶手段は、受信した列車側情報を記憶する。生成手段は、受信した列車側情報に含まれる列車状態情報に基づいて列車に対する制御情報を生成する。第2の送信手段は、生成した制御情報に列車識別情報を付加してブロードキャストする。
(もっと読む)
列車制御装置
【課題】自動で走行試験用のノッチパターンに従って制御指令を出力することで正確なステップ応答データを得られる列車制御装置を提供する。
【解決手段】列車制御装置は、速度検出手段と、位置検出手段と、受信手段と、第1の出力手段と、特定手段と、第2の出力手段と、出力切換手段とを備える。前記第1の出力手段は、前記受信手段で受信された信号現示速度情報に基づいて、前記列車が駅間を走行し停止目標位置に停止するような第1制御指令を出力する。前記特定手段は、前記位置検出手段で検出された位置情報に基づいて、駅間における指定の距離範囲を特定する。前記第2の出力手段は、前記特定手段により特定された指定の距離範囲において、所定のノッチパターンに従って第2制御指令を出力する。前記出力切換手段は、前記第2の出力手段の第2制御指令及び、前記第1の出力手段の第1制御指令の出力中、前記第2制御指令を優先する。
(もっと読む)
物品搬送装置
【課題】台車ユニットの走行時に、外部からの操作により台車ユニットを停止させることができる物品搬送装置を提供すること。
【解決手段】搬送経路に沿って配設された走行レール3と、走行レール3を走行可能な台車ユニット4と、を備え、物品2を台車ユニット4に積載して搬送経路に沿って搬送する物品搬送装置1において、台車ユニット4は、台車ユニット4を走行させる駆動手段17と、駆動手段17に電力を供給する蓄電手段5と、蓄電手段5から駆動手段17に供給される電力の制御を行う制御回路29と、制御回路29に接続される台車用無線モジュール41と、を有し、台車用無線モジュール41は、受信される操作信号に基づいて、制御回路29の操作を行う。
(もっと読む)
列車制御装置、及び車両
【課題】繰り返し列車速度の加速や減速を行うことを防いで、列車の乗り心地を改善して
安全性が向上する列車制御装置及び列車制御方法を提供する。
【解決手段】列車自動運転装置4は、ATC車上装置3が備える受信手段で、在線する閉
塞区間の信号現示速度よりも次の閉塞区間の信号現示速度の方が小さいときに得られる前
方予告検知信号が受信され、且つ先行列車の進行により在線する閉塞区間の信号現示速度
が大きくなったとき、ATC車上装置3からの信号現示速度を超えない範囲において、速
度検知手段6より得られる列車速度を維持するように、駆動/制動装置8の定速制御を行
う。
(もっと読む)
51 - 60 / 284
[ Back to top ]