
国際特許分類[B60T8/17]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677)
国際特許分類[B60T8/17]の下位に属する分類
この調整で使用されるパラメータを検知するもの;この調整で使用される値を測定するもの (161)
この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
望ましくない信号による影響,例.振動または電子ノイズによるもの,を除去または減少させるもの (27)
特殊な制御理論の使用に特徴を有するもの,例.ファジー理論 (37)
車両の加速時の過度な車輪回転の防止に特に適したブレーキ調整,例.トラクション制御のためのもの (131)
車両の安定の制御に特に適したブレーキ調整,例.カーブでのヨーレートまたは横加速度を考慮したもの (913)
車両の減速時の,過度の車輪のスリップの防止に特に適したブレーキ調整,例.ABS (492)
国際特許分類[B60T8/17]に分類される特許
11 - 20 / 1,515
車両用制動装置
【課題】電源系統の失陥時であっても、ブレーキ操作部材の操作量に応じたブレーキ力を発揮することができる車両用制動装置を提供する。
【解決手段】本発明の車両用制動装置は、マスタピストンがサーボ室内のサーボ圧に駆動されて移動し、マスタピストンの移動によりマスタ室圧のマスタ圧が変化するマスタシリンダ1と、高圧源及びサーボ室に接続され、高圧源のブレーキ液圧に基づいて、パイロット室内のパイロット圧に応じたサーボ圧をサーボ室内に発生させる機械式のサーボ圧発生装置44と、パイロット室に接続され、所望のパイロット圧をパイロット室内に発生させる電動式のパイロット圧発生装置41、42、43と、マスタ室とパイロット室とを接続するマスタパイロット間ブレーキ液経路511と、を備え、電源系統の正常時に、パイロット圧発生装置によりパイロット圧を発生させ、電源系統の失陥時に、マスタ圧をパイロット圧とすることを特徴とする。
(もっと読む)
車両用ブレーキ装置

【課題】 ブレーキペダルのストロークと、ストロークセンサの出力との線形性およびゲインを高める。
【解決手段】 ブレーキペダル12のストロークを検出するストロークセンサScが、ペダル回動軸12bとは軸心を異にして平行に配置されるセンサ回動軸74と、ペダルアーム12cの回動によりセンサ回動軸74まわりに回動するセンサアーム75とを備えており、ストロークセンサScの分解能を他の領域よりも高く設定する領域にあるときに、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるようにしたので、ストロークセンサScに高い検出精度が要求とされるときに、ストロークセンサScの出力特性の線形性を高めて誤差の発生を最小限に抑えることができるだけでなく、ストロークセンサScの取り付け位置にバラツキがあっても、出力特性の変化を最小限に抑えてブレーキフィールを高めることができる。
(もっと読む)
車両用制動装置
【課題】レギュレータピストンの増圧位置固着故障を検出でき、且つ検出後の車両の走行を可能とする車両用制動装置を提供する。
【解決手段】本発明の車両用制動装置は、高圧ポートと、低圧ポートと、サーボ室に連通する出力ポートと、パイロット液圧が供給されるパイロット室と、パイロット液圧に応じて、出力ポートを高圧ポートに連通させる増圧位置と、出力ポートを低圧ポートに連通させる減圧位置との間で作動するレギュレータピストンと、を有するレギュレータと、高圧力源とパイロット室との間の増圧弁と、低圧力源とパイロット室との間の減圧弁と、増圧弁と減圧弁とを制御する制御部と、を備え、制御部は、増圧位置固着故障を検出する故障検出手段を有し、故障検出手段によって増圧位置固着故障が検出された場合、増圧弁と減圧弁とを開状態に制御してサーボ室を減圧する。
(もっと読む)
車両挙動制御装置
【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
電動パーキングブレーキ装置
【課題】電源電位低下などによりアクチュエータの解除駆動の途中でECUなどの制御部がリセットされた場合に、電動パーキングブレーキを操作した場合であっても、確実且つ早く作動が可能な作動開始位置とすることができる電動パーキングブレーキ装置を提供する。
【解決手段】アクチュエータの駆動を作動駆動か解除駆動かの駆動状態を電動パーキングブレーキ作動情報として記憶させ、最初のアクチュエータのゼロ位置調整において、前記最初のアクチュエータのゼロ位置調整後であって前記アクチュエータの駆動中に中断した際に、解除位置復帰制御として、前記アクチュエータを最大量解除駆動した後に、前記解除完了位置ストローク量により前記アクチュエータを解除完了位置まで駆動して、前記パーキングブレーキの作動開始位置とすることを特徴とする電動パーキングブレーキ装置を用いる。
(もっと読む)
ブレーキ装置
【課題】回生協調を行なうブレーキ装置において、ブレーキペダルを急操作したとき、ブレーキペダルに適度な反力を与えると共に液圧制御装置に円滑にブレーキ液を供給する。
【解決手段】ブレーキペダル19によってマスタシリンダ110でブレーキ液圧を発生させて、各車輪のホイールシリンダBa〜Bdに供給する。リザーバポート166、167を開いた状態で回生ブレーキ装置8により回生制動を行ない、液圧制御装置5によってホイールシリンダBa〜Bdに供給するブレーキ液圧を調整して回生協調制御を実行する。ブレーキペダル19の急操作に対して、リザーバポート166、167のオリフィスにより適度な反力を付与し、また、リザーバポート166、167をバイパスするバイパス通路180、181及び逆止弁182、183により、液圧制御装置5にブレーキ液を円滑に供給して、プライマリ及びセカンダリ室162、163の過度の減圧を防止する。
(もっと読む)
制動力制御装置
【課題】目標減速度と実減速度に差が出る制動時、目標減速度に到達する応答性を向上すること。
【解決手段】ハイブリッド車の制動力制御装置は、ブレーキ操作に応じて車輪に付与するマスターシリンダ液圧を発生するブレーキ液圧発生装置1と、統合コントローラ9と、を備える。統合コントローラ9は、マスターシリンダ液圧が所定値より高く、目標減速度と実減速度の差が所定値以上の場合、マスターシリンダ液圧による制動力で不足する減速度の差分をアシスト液圧によるアシスト制動力で補うと共に、フロント側配分とリア側配分による制動力前後配分について、目標減速度と実減速度の差が所定値未満のときの定常時配分と比較してフロント側配分を上げる制御を行う(図3)。
(もっと読む)
車両のブレーキングを制御するための方法
【課題】ブレーキペダルの動作の妨害といったようなブレーキング異常に対処すること。
【解決手段】モータ車両100のブレーキングを制御するための方法であって、ブレーキングシステム140の油圧に関連した情報を受領し;ブレーキペダル表面190に対して印加された圧力に関連した情報を受領し;ブレーキングシステムの油圧とブレーキペダル表面圧力との間の、測定されたブレーキング関係を決定し;所定のブレーキング関係を取得し;測定されたブレーキング関係と所定のブレーキング関係とを比較し;測定されたブレーキング関係が所定のブレーキング関係とは相違するものである場合には、モータ車両の速度を低減し得るよう構成されたブレーキング補助手段を起動する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ踏み上げ操作の際、ペダルストロークに対するホイールシリンダ液圧特性が段付き特性になるのを抑えることで、制動減速度のフィーリングを向上すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、ブレーキスイッチ93と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、両M/Cカットソレノイドバルブ25,26と、低圧リザーバ23からブレーキ液を吸い込む液圧ポンプ22と、によりポンプアップ液圧を発生する。ブレーキコントローラ7は、ブレーキ踏み上げ操作の際、少なくともマスターシリンダ13内のブレーキ液が低圧リザーバ23に流れ込むストローク位置S2から、ホイールシリンダ液圧の低下が終わるストローク位置S3までを含むストローク領域において、ペダルストロークの上昇に対して滑らかな勾配にて前記ホイールシリンダ液圧が増加するように両M/Cカットソレノイドバルブ25,26を制御する(図3)。
(もっと読む)
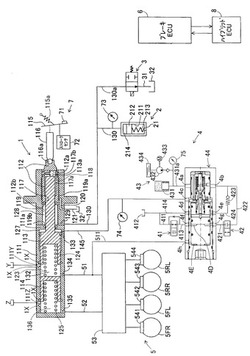
車両用制動力制御装置
【課題】ブレーキ操作時であって、マスターシリンダピストンの移動速度であるピストン速度が速いとき、ドライバーに与えるブレーキ操作違和感を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、マスターシリンダ3と、乖離量算出部60と、ペダル踏力算出部61と、目標減速度算出部69と、を備える。乖離量算出部60は、プライマリピストン11のピストン速度が速いほど大きくなるペダル踏力の過渡的変化分を補正値Hとして算出する。ペダル踏力算出部61は、マスターシリンダ圧に基づくペダル踏力(e-ACT反力)を、補正値Hにより補正することで制御用ペダル踏力を算出する。
(もっと読む)
11 - 20 / 1,515
[ Back to top ]